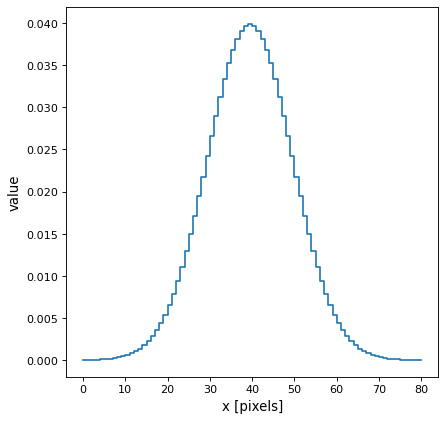
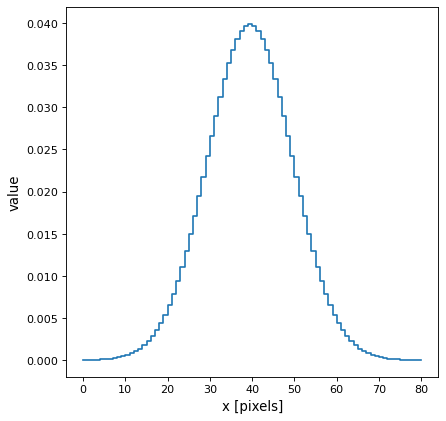
Gaussian1DKernel¶
- class astropy.convolution.Gaussian1DKernel(stddev, **kwargs)[source]¶
Bases:
Kernel1D1D Gaussian filter kernel.
The Gaussian filter is a filter with great smoothing properties. It is isotropic and does not produce artifacts.
The generated kernel is normalized so that it integrates to 1.
- Parameters:
- stddevnumber
Standard deviation of the Gaussian kernel.
- x_size
python:int, optional Size of the kernel array. Default = ⌊8*stddev+1⌋.
- mode{‘center’, ‘linear_interp’, ‘oversample’, ‘integrate’}, optional
- One of the following discretization modes:
- ‘center’ (default)
Discretize model by taking the value at the center of the bin.
- ‘linear_interp’
Discretize model by linearly interpolating between the values at the corners of the bin.
- ‘oversample’
Discretize model by taking the average on an oversampled grid.
- ‘integrate’
Discretize model by integrating the model over the bin. Very slow.
- factornumber, optional
Factor of oversampling. Default factor = 10. If the factor is too large, evaluation can be very slow.
See also
Examples
Kernel response:
{kind=link}
{kind=link}