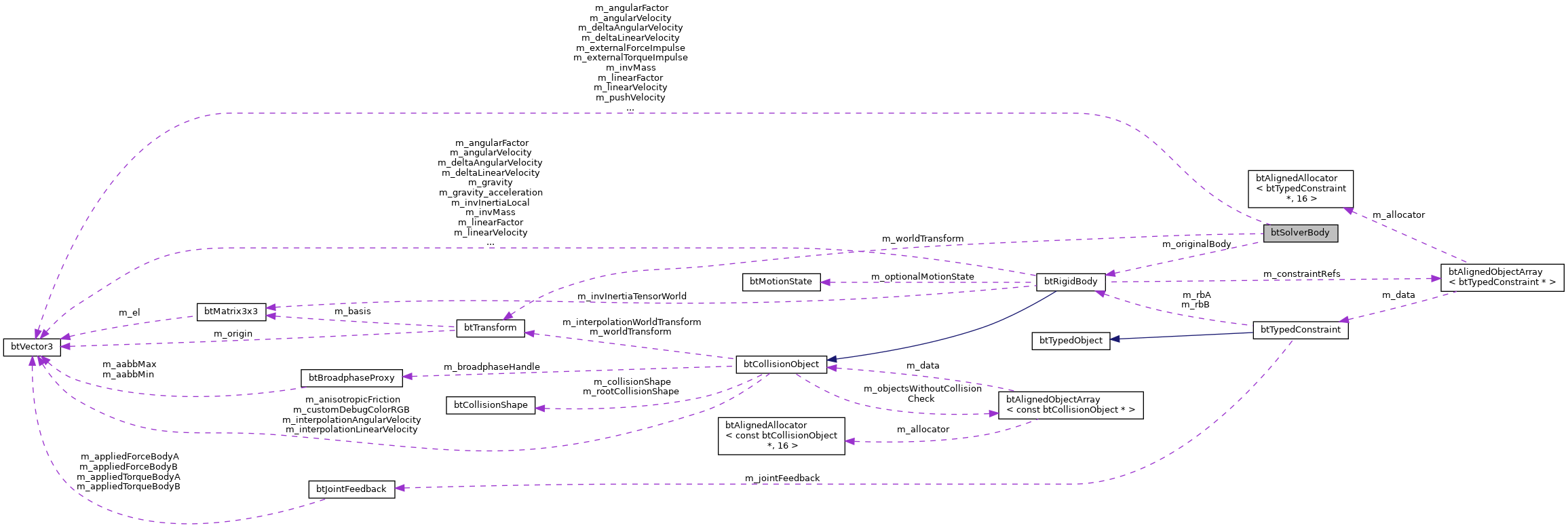
The btSolverBody is an internal datastructure for the constraint solver. Only necessary data is packed to increase cache coherence/performance. More...
#include <btSolverBody.h>
Detailed Description
The btSolverBody is an internal datastructure for the constraint solver. Only necessary data is packed to increase cache coherence/performance.
Definition at line 103 of file btSolverBody.h.
Member Function Documentation
◆ applyImpulse()
|
inline |
Definition at line 156 of file btSolverBody.h.
◆ BT_DECLARE_ALIGNED_ALLOCATOR()
| btSolverBody::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
◆ getAngularVelocity()
|
inline |
Definition at line 147 of file btSolverBody.h.
◆ getDeltaAngularVelocity()
|
inline |
Definition at line 179 of file btSolverBody.h.
◆ getDeltaLinearVelocity()
|
inline |
Definition at line 174 of file btSolverBody.h.
◆ getPushVelocity()
|
inline |
Definition at line 184 of file btSolverBody.h.
◆ getTurnVelocity()
|
inline |
Definition at line 189 of file btSolverBody.h.
◆ getVelocityInLocalPointNoDelta()
|
inline |
Definition at line 131 of file btSolverBody.h.
◆ getVelocityInLocalPointObsolete()
|
inline |
Definition at line 139 of file btSolverBody.h.
◆ getWorldTransform()
|
inline |
Definition at line 126 of file btSolverBody.h.
◆ internalApplyImpulse()
|
inline |
Definition at line 243 of file btSolverBody.h.
◆ internalApplyPushImpulse()
|
inline |
Definition at line 165 of file btSolverBody.h.
◆ internalGetAngularFactor()
|
inline |
Definition at line 207 of file btSolverBody.h.
◆ internalGetAngularVelocity()
|
inline |
Definition at line 237 of file btSolverBody.h.
◆ internalGetDeltaAngularVelocity()
|
inline |
Definition at line 202 of file btSolverBody.h.
◆ internalGetDeltaLinearVelocity()
|
inline |
some internal methods, don't use them
Definition at line 197 of file btSolverBody.h.
◆ internalGetInvMass()
|
inline |
Definition at line 212 of file btSolverBody.h.
◆ internalGetPushVelocity()
|
inline |
Definition at line 222 of file btSolverBody.h.
◆ internalGetTurnVelocity()
|
inline |
Definition at line 227 of file btSolverBody.h.
◆ internalGetVelocityInLocalPointObsolete()
|
inline |
Definition at line 232 of file btSolverBody.h.
◆ internalSetInvMass()
|
inline |
Definition at line 217 of file btSolverBody.h.
◆ setWorldTransform()
|
inline |
Definition at line 121 of file btSolverBody.h.
◆ writebackVelocity()
|
inline |
Definition at line 252 of file btSolverBody.h.
◆ writebackVelocityAndTransform()
|
inline |
Definition at line 263 of file btSolverBody.h.
Member Data Documentation
◆ m_angularFactor
| btVector3 btSolverBody::m_angularFactor |
Definition at line 110 of file btSolverBody.h.
◆ m_angularVelocity
| btVector3 btSolverBody::m_angularVelocity |
Definition at line 116 of file btSolverBody.h.
◆ m_deltaAngularVelocity
| btVector3 btSolverBody::m_deltaAngularVelocity |
Definition at line 109 of file btSolverBody.h.
◆ m_deltaLinearVelocity
| btVector3 btSolverBody::m_deltaLinearVelocity |
Definition at line 108 of file btSolverBody.h.
◆ m_externalForceImpulse
| btVector3 btSolverBody::m_externalForceImpulse |
Definition at line 117 of file btSolverBody.h.
◆ m_externalTorqueImpulse
| btVector3 btSolverBody::m_externalTorqueImpulse |
Definition at line 118 of file btSolverBody.h.
◆ m_invMass
| btVector3 btSolverBody::m_invMass |
Definition at line 112 of file btSolverBody.h.
◆ m_linearFactor
| btVector3 btSolverBody::m_linearFactor |
Definition at line 111 of file btSolverBody.h.
◆ m_linearVelocity
| btVector3 btSolverBody::m_linearVelocity |
Definition at line 115 of file btSolverBody.h.
◆ m_originalBody
| btRigidBody* btSolverBody::m_originalBody |
Definition at line 120 of file btSolverBody.h.
◆ m_pushVelocity
| btVector3 btSolverBody::m_pushVelocity |
Definition at line 113 of file btSolverBody.h.
◆ m_turnVelocity
| btVector3 btSolverBody::m_turnVelocity |
Definition at line 114 of file btSolverBody.h.
◆ m_worldTransform
| btTransform btSolverBody::m_worldTransform |
Definition at line 107 of file btSolverBody.h.
The documentation for this struct was generated from the following file: