#include <btCGProjection.h>
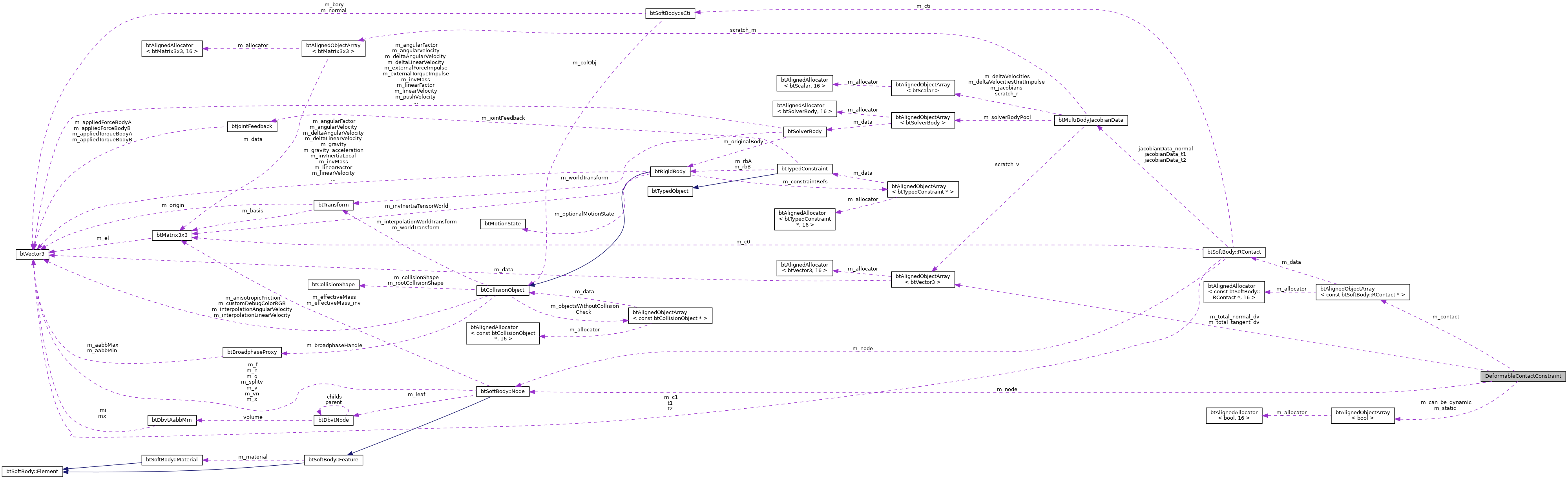
Collaboration diagram for DeformableContactConstraint:
Public Member Functions | |
| DeformableContactConstraint (const btSoftBody::RContact &rcontact) | |
| DeformableContactConstraint () | |
| void | append (const btSoftBody::RContact &rcontact) |
| void | replace (const btSoftBody::RContact &rcontact) |
| ~DeformableContactConstraint () | |
Public Attributes | |
| const btSoftBody::Node * | m_node |
| btAlignedObjectArray< const btSoftBody::RContact * > | m_contact |
| btAlignedObjectArray< btVector3 > | m_total_normal_dv |
| btAlignedObjectArray< btVector3 > | m_total_tangent_dv |
| btAlignedObjectArray< bool > | m_static |
| btAlignedObjectArray< bool > | m_can_be_dynamic |
Detailed Description
Definition at line 23 of file btCGProjection.h.
Constructor & Destructor Documentation
◆ DeformableContactConstraint() [1/2]
|
inline |
Definition at line 32 of file btCGProjection.h.
◆ DeformableContactConstraint() [2/2]
|
inline |
Definition at line 37 of file btCGProjection.h.
◆ ~DeformableContactConstraint()
|
inline |
Definition at line 61 of file btCGProjection.h.
Member Function Documentation
◆ append()
|
inline |
Definition at line 42 of file btCGProjection.h.
◆ replace()
|
inline |
Definition at line 51 of file btCGProjection.h.
Member Data Documentation
◆ m_can_be_dynamic
| btAlignedObjectArray<bool> DeformableContactConstraint::m_can_be_dynamic |
Definition at line 30 of file btCGProjection.h.
◆ m_contact
| btAlignedObjectArray<const btSoftBody::RContact*> DeformableContactConstraint::m_contact |
Definition at line 26 of file btCGProjection.h.
◆ m_node
| const btSoftBody::Node* DeformableContactConstraint::m_node |
Definition at line 25 of file btCGProjection.h.
◆ m_static
| btAlignedObjectArray<bool> DeformableContactConstraint::m_static |
Definition at line 29 of file btCGProjection.h.
◆ m_total_normal_dv
| btAlignedObjectArray<btVector3> DeformableContactConstraint::m_total_normal_dv |
Definition at line 27 of file btCGProjection.h.
◆ m_total_tangent_dv
| btAlignedObjectArray<btVector3> DeformableContactConstraint::m_total_tangent_dv |
Definition at line 28 of file btCGProjection.h.
The documentation for this struct was generated from the following file: