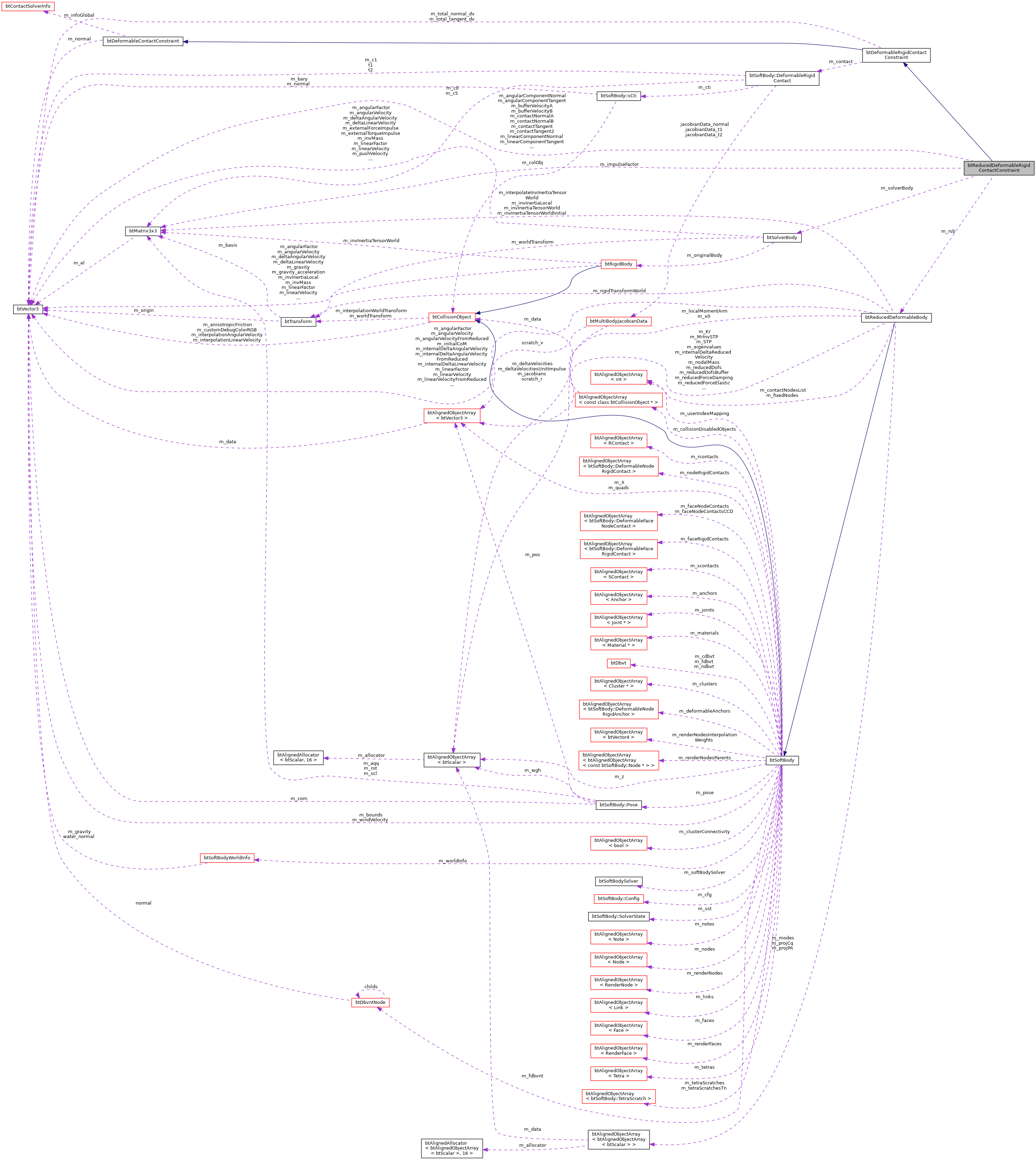
#include <btReducedDeformableContactConstraint.h>

 Public Member Functions inherited from
Public Member Functions inherited from Detailed Description
Definition at line 41 of file btReducedDeformableContactConstraint.h.
Constructor & Destructor Documentation
◆ btReducedDeformableRigidContactConstraint() [1/2]
| btReducedDeformableRigidContactConstraint::btReducedDeformableRigidContactConstraint | ( | btReducedDeformableBody * | rsb, |
| const btSoftBody::DeformableRigidContact & | c, | ||
| const btContactSolverInfo & | infoGlobal, | ||
| btScalar | dt | ||
| ) |
Definition at line 59 of file btReducedDeformableContactConstraint.cpp.
◆ btReducedDeformableRigidContactConstraint() [2/2]
|
inline |
Definition at line 93 of file btReducedDeformableContactConstraint.h.
◆ ~btReducedDeformableRigidContactConstraint()
|
inlinevirtual |
Definition at line 94 of file btReducedDeformableContactConstraint.h.
Member Function Documentation
◆ applyImpulse()
|
inlinevirtual |
Implements btDeformableContactConstraint.
Reimplemented in btReducedDeformableNodeRigidContactConstraint, and btReducedDeformableFaceRigidContactConstraint.
Definition at line 111 of file btReducedDeformableContactConstraint.h.
◆ applySplitImpulse()
|
inlinevirtual |
Implements btDeformableRigidContactConstraint.
Definition at line 113 of file btReducedDeformableContactConstraint.h.
◆ calculateTangentialImpulse()
| void btReducedDeformableRigidContactConstraint::calculateTangentialImpulse | ( | btScalar & | deltaImpulse_tangent, |
| btScalar & | appliedImpulse, | ||
| const btScalar | rhs_tangent, | ||
| const btScalar | tangentImpulseFactorInv, | ||
| const btVector3 & | tangent, | ||
| const btScalar | lower_limit, | ||
| const btScalar | upper_limit, | ||
| const btVector3 & | deltaV_rel | ||
| ) |
Definition at line 290 of file btReducedDeformableContactConstraint.cpp.
◆ getDeltaVa()
|
pure virtual |
Implemented in btReducedDeformableNodeRigidContactConstraint.
◆ getDeltaVb()
|
pure virtual |
Implemented in btReducedDeformableNodeRigidContactConstraint.
◆ getVa()
|
virtual |
Reimplemented from btDeformableRigidContactConstraint.
Definition at line 97 of file btReducedDeformableContactConstraint.cpp.
◆ setSolverBody()
| void btReducedDeformableRigidContactConstraint::setSolverBody | ( | const int | bodyId, |
| btSolverBody & | solver_body | ||
| ) |
Definition at line 81 of file btReducedDeformableContactConstraint.cpp.
◆ solveConstraint()
|
virtual |
Reimplemented from btDeformableRigidContactConstraint.
Definition at line 107 of file btReducedDeformableContactConstraint.cpp.
◆ warmStarting()
|
inlinevirtual |
Reimplemented in btReducedDeformableNodeRigidContactConstraint.
Definition at line 98 of file btReducedDeformableContactConstraint.h.
Member Data Documentation
◆ m_angularComponentNormal
| btVector3 btReducedDeformableRigidContactConstraint::m_angularComponentNormal |
Definition at line 83 of file btReducedDeformableContactConstraint.h.
◆ m_angularComponentTangent
| btVector3 btReducedDeformableRigidContactConstraint::m_angularComponentTangent |
Definition at line 86 of file btReducedDeformableContactConstraint.h.
◆ m_appliedNormalImpulse
| btScalar btReducedDeformableRigidContactConstraint::m_appliedNormalImpulse |
Definition at line 54 of file btReducedDeformableContactConstraint.h.
◆ m_appliedTangentImpulse
| btScalar btReducedDeformableRigidContactConstraint::m_appliedTangentImpulse |
Definition at line 55 of file btReducedDeformableContactConstraint.h.
◆ m_appliedTangentImpulse2
| btScalar btReducedDeformableRigidContactConstraint::m_appliedTangentImpulse2 |
Definition at line 56 of file btReducedDeformableContactConstraint.h.
◆ m_bufferVelocityA
| btVector3 btReducedDeformableRigidContactConstraint::m_bufferVelocityA |
Definition at line 80 of file btReducedDeformableContactConstraint.h.
◆ m_bufferVelocityB
| btVector3 btReducedDeformableRigidContactConstraint::m_bufferVelocityB |
Definition at line 81 of file btReducedDeformableContactConstraint.h.
◆ m_cfm
| btScalar btReducedDeformableRigidContactConstraint::m_cfm |
Definition at line 66 of file btReducedDeformableContactConstraint.h.
◆ m_cfm_friction
| btScalar btReducedDeformableRigidContactConstraint::m_cfm_friction |
Definition at line 67 of file btReducedDeformableContactConstraint.h.
◆ m_collideMultibody
| bool btReducedDeformableRigidContactConstraint::m_collideMultibody |
Definition at line 45 of file btReducedDeformableContactConstraint.h.
◆ m_collideStatic
| bool btReducedDeformableRigidContactConstraint::m_collideStatic |
Definition at line 44 of file btReducedDeformableContactConstraint.h.
◆ m_contactNormalA
| btVector3 btReducedDeformableRigidContactConstraint::m_contactNormalA |
Definition at line 72 of file btReducedDeformableContactConstraint.h.
◆ m_contactNormalB
| btVector3 btReducedDeformableRigidContactConstraint::m_contactNormalB |
Definition at line 73 of file btReducedDeformableContactConstraint.h.
◆ m_contactTangent
| btVector3 btReducedDeformableRigidContactConstraint::m_contactTangent |
Definition at line 74 of file btReducedDeformableContactConstraint.h.
◆ m_contactTangent2
| btVector3 btReducedDeformableRigidContactConstraint::m_contactTangent2 |
Definition at line 75 of file btReducedDeformableContactConstraint.h.
◆ m_dt
| btScalar btReducedDeformableRigidContactConstraint::m_dt |
Definition at line 52 of file btReducedDeformableContactConstraint.h.
◆ m_erp
| btScalar btReducedDeformableRigidContactConstraint::m_erp |
Definition at line 68 of file btReducedDeformableContactConstraint.h.
◆ m_erp_friction
| btScalar btReducedDeformableRigidContactConstraint::m_erp_friction |
Definition at line 69 of file btReducedDeformableContactConstraint.h.
◆ m_friction
| btScalar btReducedDeformableRigidContactConstraint::m_friction |
Definition at line 70 of file btReducedDeformableContactConstraint.h.
◆ m_impulseFactor
| btMatrix3x3 btReducedDeformableRigidContactConstraint::m_impulseFactor |
Definition at line 78 of file btReducedDeformableContactConstraint.h.
◆ m_linearComponentNormal
| btVector3 btReducedDeformableRigidContactConstraint::m_linearComponentNormal |
Definition at line 82 of file btReducedDeformableContactConstraint.h.
◆ m_linearComponentTangent
| btVector3 btReducedDeformableRigidContactConstraint::m_linearComponentTangent |
Definition at line 85 of file btReducedDeformableContactConstraint.h.
◆ m_nodeQueryIndex
| int btReducedDeformableRigidContactConstraint::m_nodeQueryIndex |
Definition at line 47 of file btReducedDeformableContactConstraint.h.
◆ m_normalImpulseFactor
| btScalar btReducedDeformableRigidContactConstraint::m_normalImpulseFactor |
Definition at line 57 of file btReducedDeformableContactConstraint.h.
◆ m_relPosA
| btVector3 btReducedDeformableRigidContactConstraint::m_relPosA |
Definition at line 76 of file btReducedDeformableContactConstraint.h.
◆ m_relPosB
| btVector3 btReducedDeformableRigidContactConstraint::m_relPosB |
Definition at line 77 of file btReducedDeformableContactConstraint.h.
◆ m_rhs
| btScalar btReducedDeformableRigidContactConstraint::m_rhs |
Definition at line 62 of file btReducedDeformableContactConstraint.h.
◆ m_rhs_tangent
| btScalar btReducedDeformableRigidContactConstraint::m_rhs_tangent |
Definition at line 63 of file btReducedDeformableContactConstraint.h.
◆ m_rhs_tangent2
| btScalar btReducedDeformableRigidContactConstraint::m_rhs_tangent2 |
Definition at line 64 of file btReducedDeformableContactConstraint.h.
◆ m_rsb
| btReducedDeformableBody* btReducedDeformableRigidContactConstraint::m_rsb |
Definition at line 50 of file btReducedDeformableContactConstraint.h.
◆ m_solverBody
| btSolverBody* btReducedDeformableRigidContactConstraint::m_solverBody |
Definition at line 51 of file btReducedDeformableContactConstraint.h.
◆ m_solverBodyId
| int btReducedDeformableRigidContactConstraint::m_solverBodyId |
Definition at line 48 of file btReducedDeformableContactConstraint.h.
◆ m_tangentImpulseFactor
| btScalar btReducedDeformableRigidContactConstraint::m_tangentImpulseFactor |
Definition at line 58 of file btReducedDeformableContactConstraint.h.
◆ m_tangentImpulseFactor2
| btScalar btReducedDeformableRigidContactConstraint::m_tangentImpulseFactor2 |
Definition at line 59 of file btReducedDeformableContactConstraint.h.
◆ m_tangentImpulseFactorInv
| btScalar btReducedDeformableRigidContactConstraint::m_tangentImpulseFactorInv |
Definition at line 60 of file btReducedDeformableContactConstraint.h.
◆ m_tangentImpulseFactorInv2
| btScalar btReducedDeformableRigidContactConstraint::m_tangentImpulseFactorInv2 |
Definition at line 61 of file btReducedDeformableContactConstraint.h.
The documentation for this class was generated from the following files: