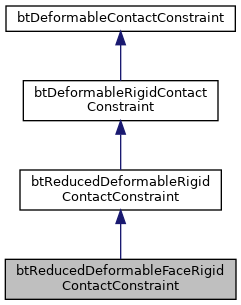
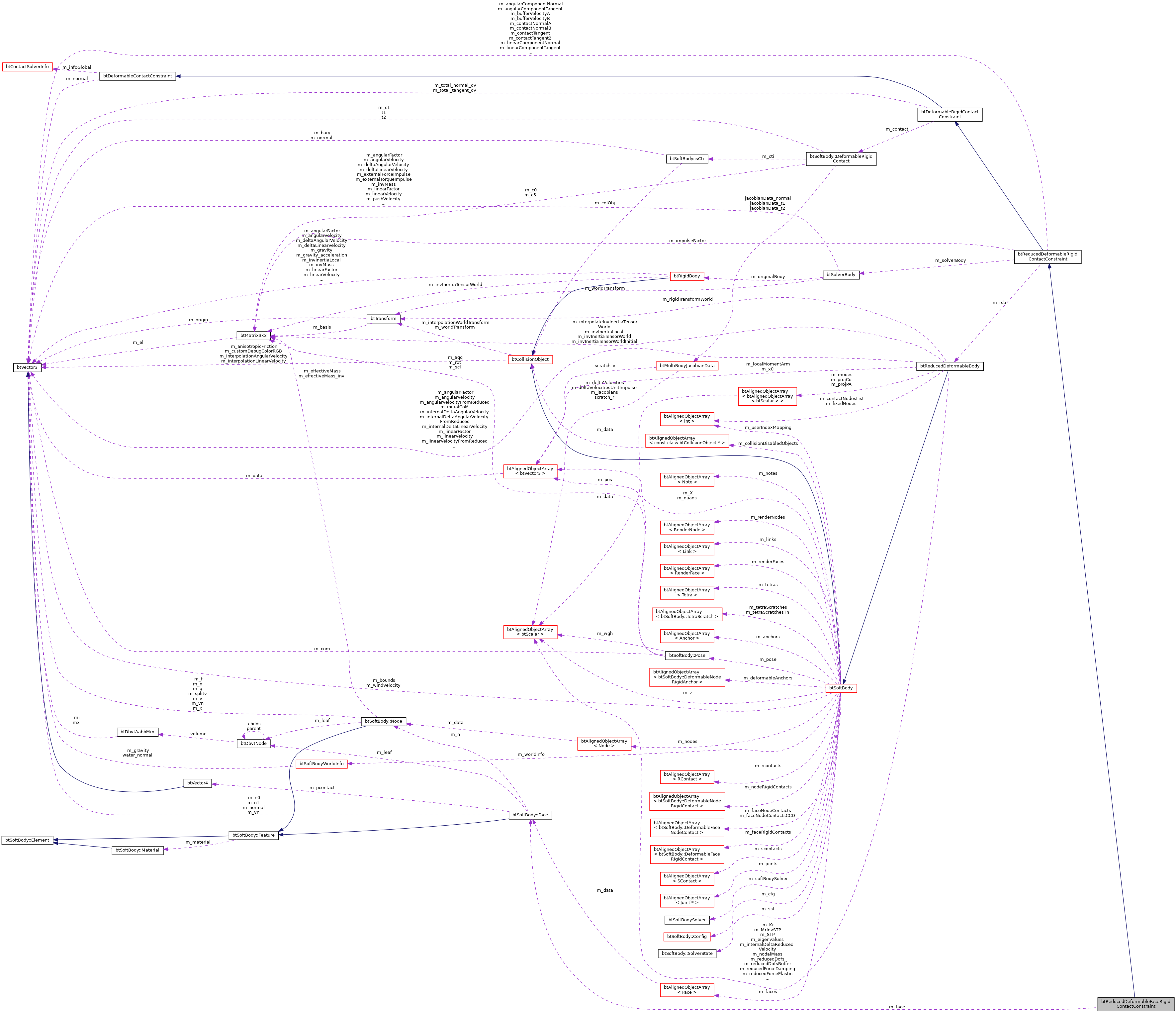
#include <btReducedDeformableContactConstraint.h>
 Public Member Functions inherited from
Public Member Functions inherited from Detailed Description
Definition at line 162 of file btReducedDeformableContactConstraint.h.
Constructor & Destructor Documentation
◆ btReducedDeformableFaceRigidContactConstraint() [1/2]
| btReducedDeformableFaceRigidContactConstraint::btReducedDeformableFaceRigidContactConstraint | ( | btReducedDeformableBody * | rsb, |
| const btSoftBody::DeformableFaceRigidContact & | contact, | ||
| const btContactSolverInfo & | infoGlobal, | ||
| btScalar | dt, | ||
| bool | useStrainLimiting | ||
| ) |
Definition at line 537 of file btReducedDeformableContactConstraint.cpp.
◆ btReducedDeformableFaceRigidContactConstraint() [2/2]
|
inline |
Definition at line 174 of file btReducedDeformableContactConstraint.h.
◆ ~btReducedDeformableFaceRigidContactConstraint()
|
inlinevirtual |
Definition at line 175 of file btReducedDeformableContactConstraint.h.
Member Function Documentation
◆ applyImpulse()
|
virtual |
Reimplemented from btReducedDeformableRigidContactConstraint.
Definition at line 576 of file btReducedDeformableContactConstraint.cpp.
◆ getContact()
|
inline |
Definition at line 187 of file btReducedDeformableContactConstraint.h.
◆ getDv()
|
virtual |
Implements btDeformableContactConstraint.
Definition at line 560 of file btReducedDeformableContactConstraint.cpp.
◆ getSplitVb()
|
virtual |
Implements btDeformableRigidContactConstraint.
Definition at line 553 of file btReducedDeformableContactConstraint.cpp.
◆ getVb()
|
virtual |
Implements btDeformableContactConstraint.
Definition at line 546 of file btReducedDeformableContactConstraint.cpp.
Member Data Documentation
◆ m_face
| btSoftBody::Face* btReducedDeformableFaceRigidContactConstraint::m_face |
Definition at line 165 of file btReducedDeformableContactConstraint.h.
◆ m_useStrainLimiting
| bool btReducedDeformableFaceRigidContactConstraint::m_useStrainLimiting |
Definition at line 166 of file btReducedDeformableContactConstraint.h.
The documentation for this class was generated from the following files: