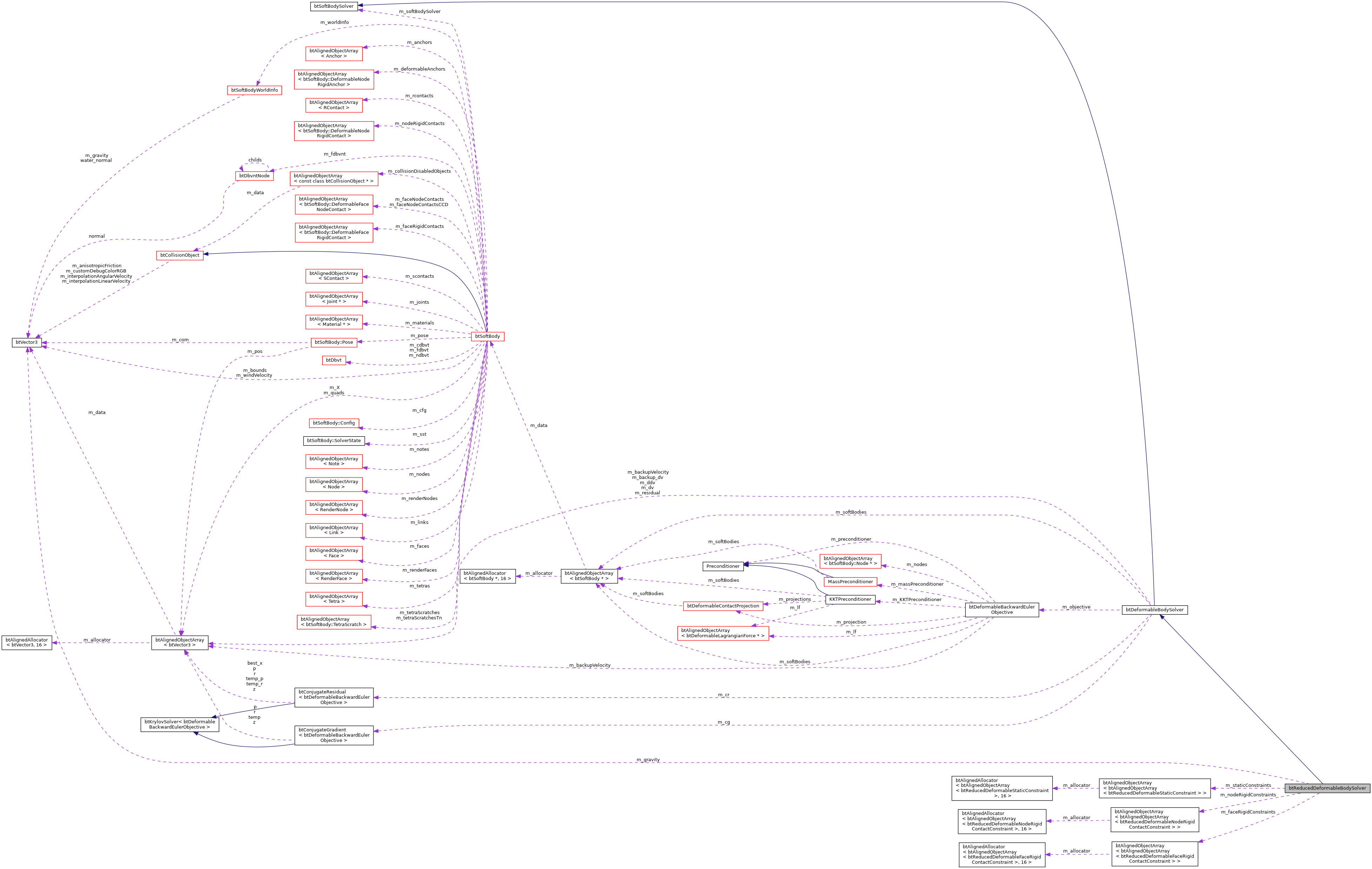
#include <btReducedDeformableBodySolver.h>
Public Member Functions | |
| btReducedDeformableBodySolver () | |
| ~btReducedDeformableBodySolver () | |
| virtual void | setGravity (const btVector3 &gravity) |
| virtual SolverTypes | getSolverType () const |
| Return the type of the solver. More... | |
| virtual void | reinitialize (const btAlignedObjectArray< btSoftBody * > &bodies, btScalar dt) |
| virtual void | predictMotion (btScalar solverdt) |
| Predict motion of soft bodies into next timestep. More... | |
| virtual void | applyTransforms (btScalar timeStep) |
| virtual void | setConstraints (const btContactSolverInfo &infoGlobal) |
| virtual btScalar | solveContactConstraints (btCollisionObject **deformableBodies, int numDeformableBodies, const btContactSolverInfo &infoGlobal) |
| virtual void | deformableBodyInternalWriteBack () |
 Public Member Functions inherited from btDeformableBodySolver Public Member Functions inherited from btDeformableBodySolver | |
| btDeformableBodySolver () | |
| virtual | ~btDeformableBodySolver () |
| virtual SolverTypes | getSolverType () const |
| Return the type of the solver. More... | |
| virtual void | updateSoftBodies () |
| Perform necessary per-step updates of soft bodies such as recomputing normals and bounding boxes. More... | |
| virtual btScalar | solveContactConstraints (btCollisionObject **deformableBodies, int numDeformableBodies, const btContactSolverInfo &infoGlobal) |
| virtual void | solveDeformableConstraints (btScalar solverdt) |
| virtual void | setGravity (const btVector3 &gravity) |
| virtual void | reinitialize (const btAlignedObjectArray< btSoftBody * > &softBodies, btScalar dt) |
| virtual void | setConstraints (const btContactSolverInfo &infoGlobal) |
| virtual void | predictMotion (btScalar solverdt) |
| Predict motion of soft bodies into next timestep. More... | |
| void | predictDeformableMotion (btSoftBody *psb, btScalar dt) |
| void | backupVelocity () |
| virtual void | setupDeformableSolve (bool implicit) |
| void | revertVelocity () |
| void | updateVelocity () |
| bool | updateNodes () |
| void | computeStep (TVStack &ddv, const TVStack &residual) |
| btScalar | computeDescentStep (TVStack &ddv, const TVStack &residual, bool verbose=false) |
| virtual void | copySoftBodyToVertexBuffer (const btSoftBody *const softBody, btVertexBufferDescriptor *vertexBuffer) |
| virtual void | processCollision (btSoftBody *softBody, const btCollisionObjectWrapper *collisionObjectWrap) |
| virtual void | processCollision (btSoftBody *softBody, btSoftBody *otherSoftBody) |
| Process a collision between two soft bodies. More... | |
| void | setImplicit (bool implicit) |
| void | setLineSearch (bool lineSearch) |
| void | updateState () |
| void | updateDv (btScalar scale=1) |
| void | updateTempPosition () |
| void | backupDv () |
| void | revertDv () |
| void | updateEnergy (btScalar scale) |
| btScalar | kineticEnergy () |
| virtual void | applyExplicitForce () |
| virtual void | applyTransforms (btScalar timeStep) |
| virtual void | setStrainLimiting (bool opt) |
| virtual void | setPreconditioner (int opt) |
| virtual btAlignedObjectArray< btDeformableLagrangianForce * > * | getLagrangianForceArray () |
| virtual const btAlignedObjectArray< btSoftBody::Node * > * | getIndices () |
| virtual void | setProjection () |
| virtual void | setLagrangeMultiplier () |
| virtual bool | isReducedSolver () |
| virtual void | deformableBodyInternalWriteBack () |
| virtual void | optimize (btAlignedObjectArray< btSoftBody * > &softBodies, bool forceUpdate=false) |
| Optimize soft bodies in this solver. More... | |
| virtual void | solveConstraints (btScalar dt) |
| Solve constraints for a set of soft bodies. More... | |
| virtual bool | checkInitialized () |
| Ensure that this solver is initialized. More... | |
| virtual void | copyBackToSoftBodies (bool bMove=true) |
| Copy necessary data back to the original soft body source objects. More... | |
| Public Member Functions inherited from btSoftBodySolver | |
| btSoftBodySolver () | |
| virtual | ~btSoftBodySolver () |
| virtual SolverTypes | getSolverType () const =0 |
| Return the type of the solver. More... | |
| virtual bool | checkInitialized ()=0 |
| Ensure that this solver is initialized. More... | |
| virtual void | optimize (btAlignedObjectArray< btSoftBody * > &softBodies, bool forceUpdate=false)=0 |
| Optimize soft bodies in this solver. More... | |
| virtual void | copyBackToSoftBodies (bool bMove=true)=0 |
| Copy necessary data back to the original soft body source objects. More... | |
| virtual void | predictMotion (btScalar solverdt)=0 |
| Predict motion of soft bodies into next timestep. More... | |
| virtual void | solveConstraints (btScalar solverdt)=0 |
| Solve constraints for a set of soft bodies. More... | |
| virtual void | updateSoftBodies ()=0 |
| Perform necessary per-step updates of soft bodies such as recomputing normals and bounding boxes. More... | |
| virtual void | processCollision (btSoftBody *, const struct btCollisionObjectWrapper *)=0 |
| Process a collision between one of the world's soft bodies and another collision object. More... | |
| virtual void | processCollision (btSoftBody *, btSoftBody *)=0 |
| Process a collision between two soft bodies. More... | |
| virtual void | setNumberOfPositionIterations (int iterations) |
| Set the number of velocity constraint solver iterations this solver uses. More... | |
| virtual int | getNumberOfPositionIterations () |
| Get the number of velocity constraint solver iterations this solver uses. More... | |
| virtual void | setNumberOfVelocityIterations (int iterations) |
| Set the number of velocity constraint solver iterations this solver uses. More... | |
| virtual int | getNumberOfVelocityIterations () |
| Get the number of velocity constraint solver iterations this solver uses. More... | |
| float | getTimeScale () |
| Return the timescale that the simulation is using. More... | |
Protected Member Functions | |
| void | predictReduceDeformableMotion (btScalar solverdt) |
| void | applyExplicitForce (btScalar solverdt) |
Protected Attributes | |
| bool | m_ascendOrder |
| btScalar | m_dampingAlpha |
| btScalar | m_dampingBeta |
| btVector3 | m_gravity |
| Protected Attributes inherited from btDeformableBodySolver | |
| int | m_numNodes |
| TVStack | m_dv |
| TVStack | m_backup_dv |
| TVStack | m_ddv |
| TVStack | m_residual |
| btAlignedObjectArray< btSoftBody * > | m_softBodies |
| TVStack | m_backupVelocity |
| btScalar | m_dt |
| btConjugateGradient< btDeformableBackwardEulerObjective > | m_cg |
| btConjugateResidual< btDeformableBackwardEulerObjective > | m_cr |
| bool | m_implicit |
| int | m_maxNewtonIterations |
| btScalar | m_newtonTolerance |
| bool | m_lineSearch |
| bool | m_reducedSolver |
| Protected Attributes inherited from btSoftBodySolver | |
| int | m_numberOfPositionIterations |
| int | m_numberOfVelocityIterations |
| float | m_timeScale |
Additional Inherited Members | |
| Public Types inherited from btSoftBodySolver | |
| enum | SolverTypes { DEFAULT_SOLVER , CPU_SOLVER , CL_SOLVER , CL_SIMD_SOLVER , DX_SOLVER , DX_SIMD_SOLVER , DEFORMABLE_SOLVER , REDUCED_DEFORMABLE_SOLVER } |
Detailed Description
Definition at line 9 of file btReducedDeformableBodySolver.h.
Constructor & Destructor Documentation
◆ btReducedDeformableBodySolver()
| btReducedDeformableBodySolver::btReducedDeformableBodySolver | ( | ) |
Definition at line 4 of file btReducedDeformableBodySolver.cpp.
◆ ~btReducedDeformableBodySolver()
|
inline |
Definition at line 28 of file btReducedDeformableBodySolver.h.
Member Function Documentation
◆ applyExplicitForce()
|
protected |
Definition at line 139 of file btReducedDeformableBodySolver.cpp.
◆ applyTransforms()
|
virtual |
Reimplemented from btDeformableBodySolver.
Definition at line 163 of file btReducedDeformableBodySolver.cpp.
◆ deformableBodyInternalWriteBack()
|
virtual |
Reimplemented from btDeformableBodySolver.
Definition at line 316 of file btReducedDeformableBodySolver.cpp.
◆ getSolverType()
|
inlinevirtual |
Return the type of the solver.
Reimplemented from btDeformableBodySolver.
Definition at line 32 of file btReducedDeformableBodySolver.h.
◆ predictMotion()
|
virtual |
Predict motion of soft bodies into next timestep.
Reimplemented from btDeformableBodySolver.
Definition at line 77 of file btReducedDeformableBodySolver.cpp.
◆ predictReduceDeformableMotion()
|
protected |
Definition at line 87 of file btReducedDeformableBodySolver.cpp.
◆ reinitialize()
|
virtual |
Reimplemented from btDeformableBodySolver.
Definition at line 18 of file btReducedDeformableBodySolver.cpp.
◆ setConstraints()
|
virtual |
Reimplemented from btDeformableBodySolver.
Definition at line 196 of file btReducedDeformableBodySolver.cpp.
◆ setGravity()
|
virtual |
Reimplemented from btDeformableBodySolver.
Definition at line 13 of file btReducedDeformableBodySolver.cpp.
◆ solveContactConstraints()
|
virtual |
Reimplemented from btDeformableBodySolver.
Definition at line 242 of file btReducedDeformableBodySolver.cpp.
Member Data Documentation
◆ m_ascendOrder
|
protected |
Definition at line 12 of file btReducedDeformableBodySolver.h.
◆ m_dampingAlpha
|
protected |
Definition at line 13 of file btReducedDeformableBodySolver.h.
◆ m_dampingBeta
|
protected |
Definition at line 14 of file btReducedDeformableBodySolver.h.
◆ m_faceRigidConstraints
| btAlignedObjectArray<btAlignedObjectArray<btReducedDeformableFaceRigidContactConstraint> > btReducedDeformableBodySolver::m_faceRigidConstraints |
Definition at line 25 of file btReducedDeformableBodySolver.h.
◆ m_gravity
|
protected |
Definition at line 16 of file btReducedDeformableBodySolver.h.
◆ m_nodeRigidConstraints
| btAlignedObjectArray<btAlignedObjectArray<btReducedDeformableNodeRigidContactConstraint> > btReducedDeformableBodySolver::m_nodeRigidConstraints |
Definition at line 24 of file btReducedDeformableBodySolver.h.
◆ m_staticConstraints
| btAlignedObjectArray<btAlignedObjectArray<btReducedDeformableStaticConstraint> > btReducedDeformableBodySolver::m_staticConstraints |
Definition at line 23 of file btReducedDeformableBodySolver.h.
The documentation for this class was generated from the following files: