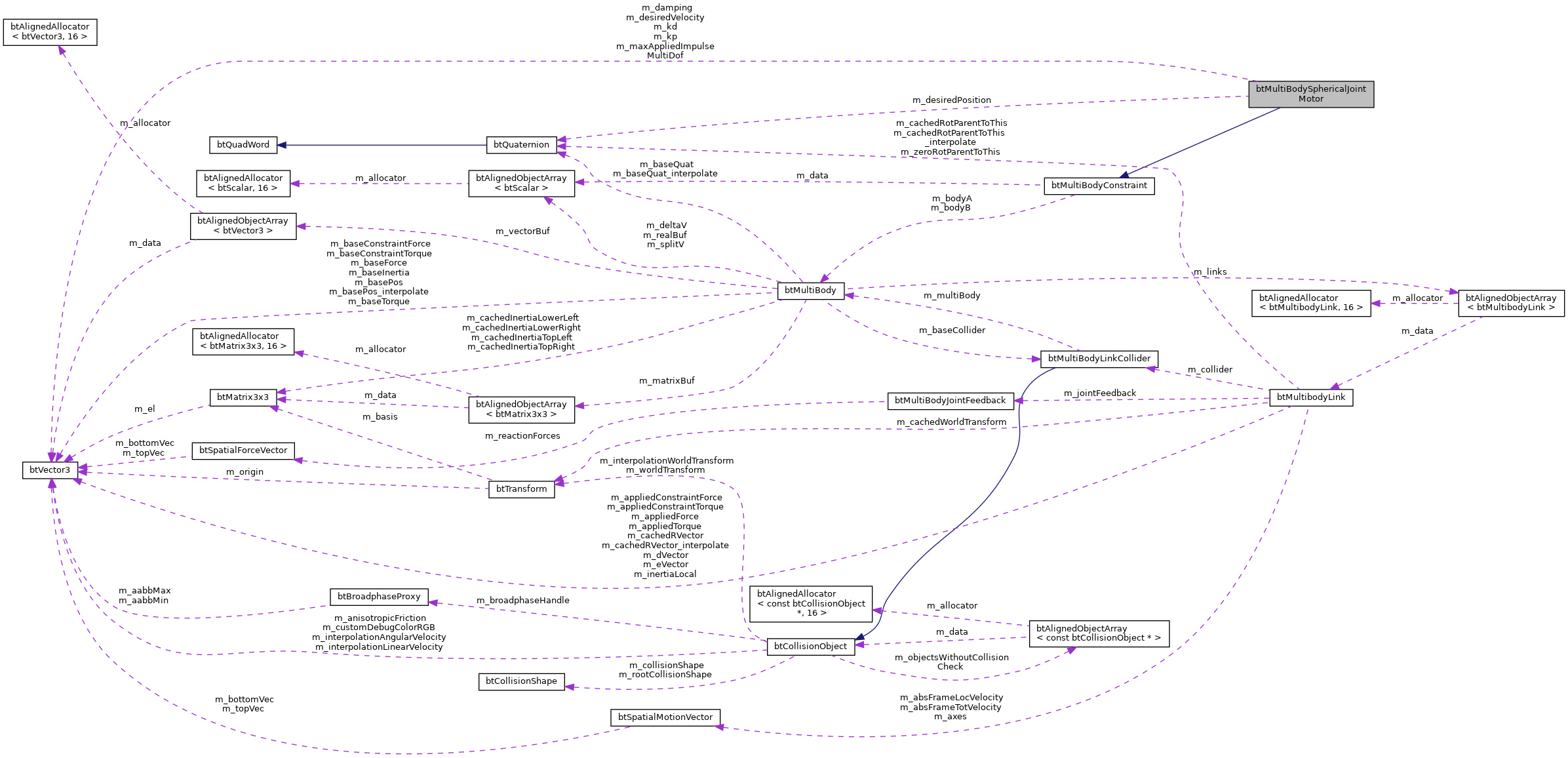
#include <btMultiBodySphericalJointMotor.h>
Public Member Functions | |
| btMultiBodySphericalJointMotor (btMultiBody *body, int link, btScalar maxMotorImpulse) | |
| This file was written by Erwin Coumans. More... | |
| virtual | ~btMultiBodySphericalJointMotor () |
| virtual void | finalizeMultiDof () |
| virtual int | getIslandIdA () const |
| virtual int | getIslandIdB () const |
| virtual void | createConstraintRows (btMultiBodyConstraintArray &constraintRows, btMultiBodyJacobianData &data, const btContactSolverInfo &infoGlobal) |
| virtual void | setVelocityTarget (const btVector3 &velTarget, btScalar kd=1.0) |
| virtual void | setVelocityTargetMultiDof (const btVector3 &velTarget, const btVector3 &kd=btVector3(1.0, 1.0, 1.0)) |
| virtual void | setPositionTarget (const btQuaternion &posTarget, btScalar kp=1.f) |
| virtual void | setPositionTargetMultiDof (const btQuaternion &posTarget, const btVector3 &kp=btVector3(1.f, 1.f, 1.f)) |
| virtual void | setErp (btScalar erp) |
| virtual btScalar | getErp () const |
| virtual void | setRhsClamp (btScalar rhsClamp) |
| btScalar | getMaxAppliedImpulseMultiDof (int i) const |
| void | setMaxAppliedImpulseMultiDof (const btVector3 &maxImp) |
| btScalar | getDamping (int i) const |
| void | setDamping (const btVector3 &damping) |
| virtual void | debugDraw (class btIDebugDraw *drawer) |
 Public Member Functions inherited from btMultiBodyConstraint Public Member Functions inherited from btMultiBodyConstraint | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| btMultiBodyConstraint (btMultiBody *bodyA, btMultiBody *bodyB, int linkA, int linkB, int numRows, bool isUnilateral, int type) | |
| virtual | ~btMultiBodyConstraint () |
| void | updateJacobianSizes () |
| void | allocateJacobiansMultiDof () |
| int | getConstraintType () const |
| virtual void | setFrameInB (const btMatrix3x3 &frameInB) |
| virtual void | setPivotInB (const btVector3 &pivotInB) |
| virtual void | finalizeMultiDof ()=0 |
| virtual int | getIslandIdA () const =0 |
| virtual int | getIslandIdB () const =0 |
| virtual void | createConstraintRows (btMultiBodyConstraintArray &constraintRows, btMultiBodyJacobianData &data, const btContactSolverInfo &infoGlobal)=0 |
| int | getNumRows () const |
| btMultiBody * | getMultiBodyA () |
| btMultiBody * | getMultiBodyB () |
| int | getLinkA () const |
| int | getLinkB () const |
| void | internalSetAppliedImpulse (int dof, btScalar appliedImpulse) |
| btScalar | getAppliedImpulse (int dof) |
| btScalar | getPosition (int row) const |
| void | setPosition (int row, btScalar pos) |
| bool | isUnilateral () const |
| btScalar * | jacobianA (int row) |
| const btScalar * | jacobianA (int row) const |
| btScalar * | jacobianB (int row) |
| const btScalar * | jacobianB (int row) const |
| btScalar | getMaxAppliedImpulse () const |
| void | setMaxAppliedImpulse (btScalar maxImp) |
| virtual void | debugDraw (class btIDebugDraw *drawer)=0 |
| virtual void | setGearRatio (btScalar ratio) |
| virtual void | setGearAuxLink (int gearAuxLink) |
| virtual void | setRelativePositionTarget (btScalar relPosTarget) |
| virtual void | setErp (btScalar erp) |
Protected Attributes | |
| btVector3 | m_desiredVelocity |
| btQuaternion | m_desiredPosition |
| bool | m_use_multi_dof_params |
| btVector3 | m_kd |
| btVector3 | m_kp |
| btScalar | m_erp |
| btScalar | m_rhsClamp |
| btVector3 | m_maxAppliedImpulseMultiDof |
| btVector3 | m_damping |
| Protected Attributes inherited from btMultiBodyConstraint | |
| btMultiBody * | m_bodyA |
| btMultiBody * | m_bodyB |
| int | m_linkA |
| int | m_linkB |
| int | m_type |
| int | m_numRows |
| int | m_jacSizeA |
| int | m_jacSizeBoth |
| int | m_posOffset |
| bool | m_isUnilateral |
| int | m_numDofsFinalized |
| btScalar | m_maxAppliedImpulse |
| btAlignedObjectArray< btScalar > | m_data |
Additional Inherited Members | |
| Protected Member Functions inherited from btMultiBodyConstraint | |
| void | applyDeltaVee (btMultiBodyJacobianData &data, btScalar *delta_vee, btScalar impulse, int velocityIndex, int ndof) |
| btScalar | fillMultiBodyConstraint (btMultiBodySolverConstraint &solverConstraint, btMultiBodyJacobianData &data, btScalar *jacOrgA, btScalar *jacOrgB, const btVector3 &constraintNormalAng, const btVector3 &constraintNormalLin, const btVector3 &posAworld, const btVector3 &posBworld, btScalar posError, const btContactSolverInfo &infoGlobal, btScalar lowerLimit, btScalar upperLimit, bool angConstraint=false, btScalar relaxation=1.f, bool isFriction=false, btScalar desiredVelocity=0, btScalar cfmSlip=0, btScalar damping=1.0) |
Detailed Description
Definition at line 24 of file btMultiBodySphericalJointMotor.h.
Constructor & Destructor Documentation
◆ btMultiBodySphericalJointMotor()
| btMultiBodySphericalJointMotor::btMultiBodySphericalJointMotor | ( | btMultiBody * | body, |
| int | link, | ||
| btScalar | maxMotorImpulse | ||
| ) |
This file was written by Erwin Coumans.
Definition at line 25 of file btMultiBodySphericalJointMotor.cpp.
◆ ~btMultiBodySphericalJointMotor()
|
virtual |
Definition at line 58 of file btMultiBodySphericalJointMotor.cpp.
Member Function Documentation
◆ createConstraintRows()
|
virtual |
Implements btMultiBodyConstraint.
Definition at line 98 of file btMultiBodySphericalJointMotor.cpp.
◆ debugDraw()
|
inlinevirtual |
Implements btMultiBodyConstraint.
Definition at line 112 of file btMultiBodySphericalJointMotor.h.
◆ finalizeMultiDof()
|
virtual |
Implements btMultiBodyConstraint.
Definition at line 42 of file btMultiBodySphericalJointMotor.cpp.
◆ getDamping()
|
inline |
Definition at line 102 of file btMultiBodySphericalJointMotor.h.
◆ getErp()
|
inlinevirtual |
Definition at line 82 of file btMultiBodySphericalJointMotor.h.
◆ getIslandIdA()
|
virtual |
Implements btMultiBodyConstraint.
Definition at line 62 of file btMultiBodySphericalJointMotor.cpp.
◆ getIslandIdB()
|
virtual |
Implements btMultiBodyConstraint.
Definition at line 80 of file btMultiBodySphericalJointMotor.cpp.
◆ getMaxAppliedImpulseMultiDof()
|
inline |
Definition at line 91 of file btMultiBodySphericalJointMotor.h.
◆ setDamping()
|
inline |
Definition at line 107 of file btMultiBodySphericalJointMotor.h.
◆ setErp()
|
inlinevirtual |
Reimplemented from btMultiBodyConstraint.
Definition at line 78 of file btMultiBodySphericalJointMotor.h.
◆ setMaxAppliedImpulseMultiDof()
|
inline |
Definition at line 96 of file btMultiBodySphericalJointMotor.h.
◆ setPositionTarget()
|
inlinevirtual |
Definition at line 64 of file btMultiBodySphericalJointMotor.h.
◆ setPositionTargetMultiDof()
|
inlinevirtual |
Definition at line 71 of file btMultiBodySphericalJointMotor.h.
◆ setRhsClamp()
|
inlinevirtual |
Definition at line 86 of file btMultiBodySphericalJointMotor.h.
◆ setVelocityTarget()
|
inlinevirtual |
Definition at line 50 of file btMultiBodySphericalJointMotor.h.
◆ setVelocityTargetMultiDof()
|
inlinevirtual |
Definition at line 57 of file btMultiBodySphericalJointMotor.h.
Member Data Documentation
◆ m_damping
|
protected |
Definition at line 35 of file btMultiBodySphericalJointMotor.h.
◆ m_desiredPosition
|
protected |
Definition at line 28 of file btMultiBodySphericalJointMotor.h.
◆ m_desiredVelocity
|
protected |
Definition at line 27 of file btMultiBodySphericalJointMotor.h.
◆ m_erp
|
protected |
Definition at line 32 of file btMultiBodySphericalJointMotor.h.
◆ m_kd
|
protected |
Definition at line 30 of file btMultiBodySphericalJointMotor.h.
◆ m_kp
|
protected |
Definition at line 31 of file btMultiBodySphericalJointMotor.h.
◆ m_maxAppliedImpulseMultiDof
|
protected |
Definition at line 34 of file btMultiBodySphericalJointMotor.h.
◆ m_rhsClamp
|
protected |
Definition at line 33 of file btMultiBodySphericalJointMotor.h.
◆ m_use_multi_dof_params
|
protected |
Definition at line 29 of file btMultiBodySphericalJointMotor.h.
The documentation for this class was generated from the following files: