btManifoldResult is a helper class to manage contact results. More...
#include <btManifoldResult.h>
Public Member Functions | |
| btManifoldResult () | |
| btManifoldResult (const btCollisionObjectWrapper *body0Wrap, const btCollisionObjectWrapper *body1Wrap) | |
| virtual | ~btManifoldResult () |
| void | setPersistentManifold (btPersistentManifold *manifoldPtr) |
| const btPersistentManifold * | getPersistentManifold () const |
| btPersistentManifold * | getPersistentManifold () |
| virtual void | setShapeIdentifiersA (int partId0, int index0) |
| setShapeIdentifiersA/B provides experimental support for per-triangle material / custom material combiner More... | |
| virtual void | setShapeIdentifiersB (int partId1, int index1) |
| virtual void | addContactPoint (const btVector3 &normalOnBInWorld, const btVector3 &pointInWorld, btScalar depth) |
| void | refreshContactPoints () |
| const btCollisionObjectWrapper * | getBody0Wrap () const |
| const btCollisionObjectWrapper * | getBody1Wrap () const |
| void | setBody0Wrap (const btCollisionObjectWrapper *obj0Wrap) |
| void | setBody1Wrap (const btCollisionObjectWrapper *obj1Wrap) |
| const btCollisionObject * | getBody0Internal () const |
| const btCollisionObject * | getBody1Internal () const |
 Public Member Functions inherited from btDiscreteCollisionDetectorInterface::Result Public Member Functions inherited from btDiscreteCollisionDetectorInterface::Result | |
| virtual | ~Result () |
| virtual void | setShapeIdentifiersA (int partId0, int index0)=0 |
| setShapeIdentifiersA/B provides experimental support for per-triangle material / custom material combiner More... | |
| virtual void | setShapeIdentifiersB (int partId1, int index1)=0 |
| virtual void | addContactPoint (const btVector3 &normalOnBInWorld, const btVector3 &pointInWorld, btScalar depth)=0 |
Static Public Member Functions | |
| static btScalar | calculateCombinedRestitution (const btCollisionObject *body0, const btCollisionObject *body1) |
| in the future we can let the user override the methods to combine restitution and friction More... | |
| static btScalar | calculateCombinedFriction (const btCollisionObject *body0, const btCollisionObject *body1) |
| User can override this material combiner by implementing gContactAddedCallback and setting body0->m_collisionFlags |= btCollisionObject::customMaterialCallback;. More... | |
| static btScalar | calculateCombinedRollingFriction (const btCollisionObject *body0, const btCollisionObject *body1) |
| static btScalar | calculateCombinedSpinningFriction (const btCollisionObject *body0, const btCollisionObject *body1) |
| static btScalar | calculateCombinedContactDamping (const btCollisionObject *body0, const btCollisionObject *body1) |
| static btScalar | calculateCombinedContactStiffness (const btCollisionObject *body0, const btCollisionObject *body1) |
Public Attributes | |
| btScalar | m_closestPointDistanceThreshold |
Protected Attributes | |
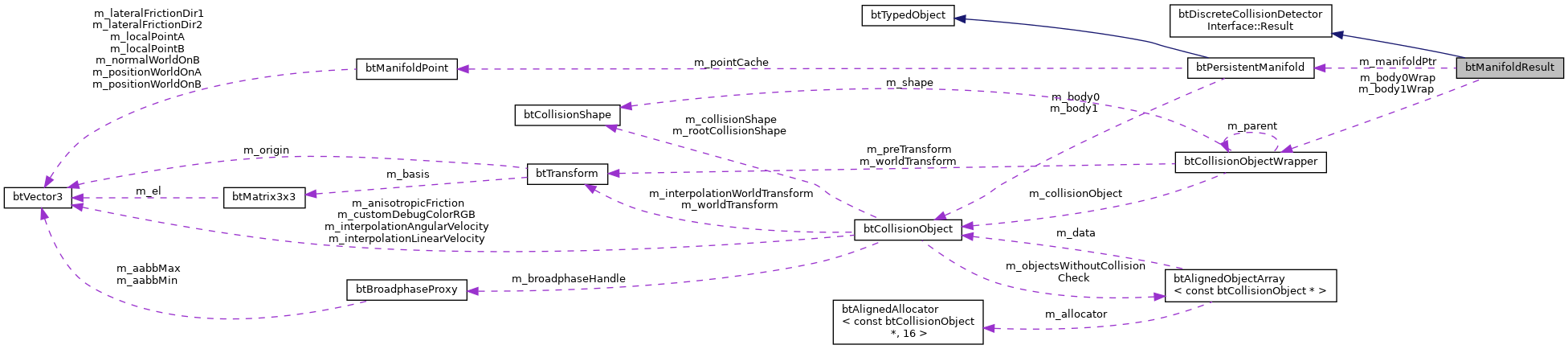
| btPersistentManifold * | m_manifoldPtr |
| const btCollisionObjectWrapper * | m_body0Wrap |
| const btCollisionObjectWrapper * | m_body1Wrap |
| int | m_partId0 |
| int | m_partId1 |
| int | m_index0 |
| int | m_index1 |
Detailed Description
btManifoldResult is a helper class to manage contact results.
Definition at line 47 of file btManifoldResult.h.
Constructor & Destructor Documentation
◆ btManifoldResult() [1/2]
|
inline |
Definition at line 60 of file btManifoldResult.h.
◆ btManifoldResult() [2/2]
| btManifoldResult::btManifoldResult | ( | const btCollisionObjectWrapper * | body0Wrap, |
| const btCollisionObjectWrapper * | body1Wrap | ||
| ) |
Definition at line 89 of file btManifoldResult.cpp.
◆ ~btManifoldResult()
|
inlinevirtual |
Definition at line 75 of file btManifoldResult.h.
Member Function Documentation
◆ addContactPoint()
|
virtual |
Implements btDiscreteCollisionDetectorInterface::Result.
Reimplemented in btBridgedManifoldResult, and btPerturbedContactResult.
Definition at line 103 of file btManifoldResult.cpp.
◆ calculateCombinedContactDamping()
|
static |
Definition at line 73 of file btManifoldResult.cpp.
◆ calculateCombinedContactStiffness()
|
static |
Definition at line 78 of file btManifoldResult.cpp.
◆ calculateCombinedFriction()
|
static |
User can override this material combiner by implementing gContactAddedCallback and setting body0->m_collisionFlags |= btCollisionObject::customMaterialCallback;.
Definition at line 56 of file btManifoldResult.cpp.
◆ calculateCombinedRestitution()
|
static |
in the future we can let the user override the methods to combine restitution and friction
Definition at line 68 of file btManifoldResult.cpp.
◆ calculateCombinedRollingFriction()
|
static |
Definition at line 31 of file btManifoldResult.cpp.
◆ calculateCombinedSpinningFriction()
|
static |
Definition at line 43 of file btManifoldResult.cpp.
◆ getBody0Internal()
|
inline |
Definition at line 142 of file btManifoldResult.h.
◆ getBody0Wrap()
|
inline |
Definition at line 123 of file btManifoldResult.h.
◆ getBody1Internal()
|
inline |
Definition at line 147 of file btManifoldResult.h.
◆ getBody1Wrap()
|
inline |
Definition at line 127 of file btManifoldResult.h.
◆ getPersistentManifold() [1/2]
|
inline |
Definition at line 86 of file btManifoldResult.h.
◆ getPersistentManifold() [2/2]
|
inline |
Definition at line 82 of file btManifoldResult.h.
◆ refreshContactPoints()
|
inline |
Definition at line 105 of file btManifoldResult.h.
◆ setBody0Wrap()
|
inline |
Definition at line 132 of file btManifoldResult.h.
◆ setBody1Wrap()
|
inline |
Definition at line 137 of file btManifoldResult.h.
◆ setPersistentManifold()
|
inline |
Definition at line 77 of file btManifoldResult.h.
◆ setShapeIdentifiersA()
|
inlinevirtual |
setShapeIdentifiersA/B provides experimental support for per-triangle material / custom material combiner
Implements btDiscreteCollisionDetectorInterface::Result.
Definition at line 91 of file btManifoldResult.h.
◆ setShapeIdentifiersB()
|
inlinevirtual |
Implements btDiscreteCollisionDetectorInterface::Result.
Definition at line 97 of file btManifoldResult.h.
Member Data Documentation
◆ m_body0Wrap
|
protected |
Definition at line 52 of file btManifoldResult.h.
◆ m_body1Wrap
|
protected |
Definition at line 53 of file btManifoldResult.h.
◆ m_closestPointDistanceThreshold
| btScalar btManifoldResult::m_closestPointDistanceThreshold |
Definition at line 152 of file btManifoldResult.h.
◆ m_index0
|
protected |
Definition at line 56 of file btManifoldResult.h.
◆ m_index1
|
protected |
Definition at line 57 of file btManifoldResult.h.
◆ m_manifoldPtr
|
protected |
Definition at line 50 of file btManifoldResult.h.
◆ m_partId0
|
protected |
Definition at line 54 of file btManifoldResult.h.
◆ m_partId1
|
protected |
Definition at line 55 of file btManifoldResult.h.
The documentation for this class was generated from the following files: