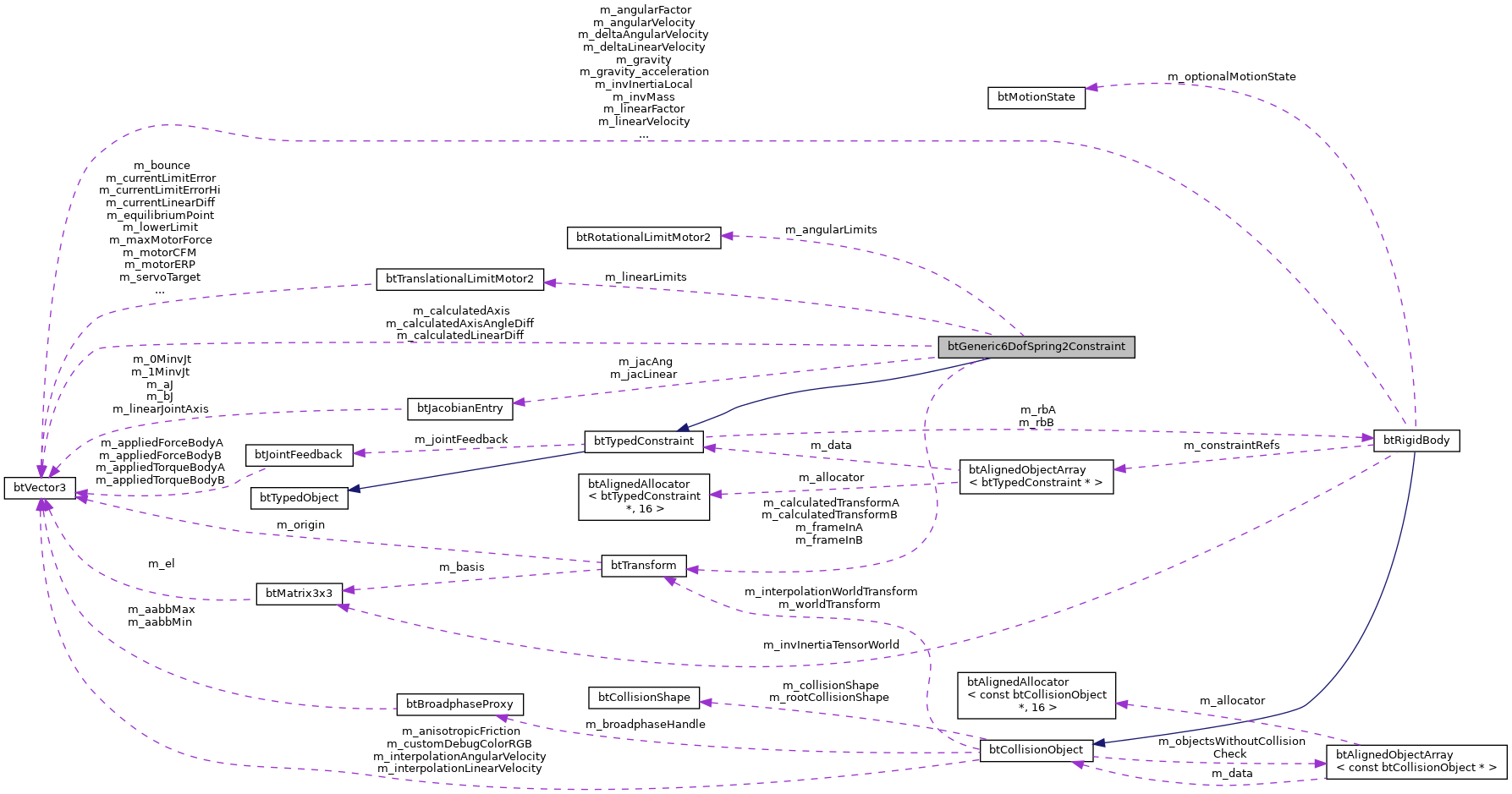
#include <btGeneric6DofSpring2Constraint.h>
Public Member Functions | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| btGeneric6DofSpring2Constraint (btRigidBody &rbA, btRigidBody &rbB, const btTransform &frameInA, const btTransform &frameInB, RotateOrder rotOrder=RO_XYZ) | |
| 2009 March: btGeneric6DofConstraint refactored by Roman Ponomarev Added support for generic constraint solver through getInfo1/getInfo2 methods More... | |
| btGeneric6DofSpring2Constraint (btRigidBody &rbB, const btTransform &frameInB, RotateOrder rotOrder=RO_XYZ) | |
| virtual void | buildJacobian () |
| internal method used by the constraint solver, don't use them directly More... | |
| virtual void | getInfo1 (btConstraintInfo1 *info) |
| internal method used by the constraint solver, don't use them directly More... | |
| virtual void | getInfo2 (btConstraintInfo2 *info) |
| internal method used by the constraint solver, don't use them directly More... | |
| virtual int | calculateSerializeBufferSize () const |
| virtual const char * | serialize (void *dataBuffer, btSerializer *serializer) const |
| fills the dataBuffer and returns the struct name (and 0 on failure) More... | |
| btRotationalLimitMotor2 * | getRotationalLimitMotor (int index) |
| btTranslationalLimitMotor2 * | getTranslationalLimitMotor () |
| void | calculateTransforms (const btTransform &transA, const btTransform &transB) |
| void | calculateTransforms () |
| const btTransform & | getCalculatedTransformA () const |
| const btTransform & | getCalculatedTransformB () const |
| const btTransform & | getFrameOffsetA () const |
| const btTransform & | getFrameOffsetB () const |
| btTransform & | getFrameOffsetA () |
| btTransform & | getFrameOffsetB () |
| btVector3 | getAxis (int axis_index) const |
| btScalar | getAngle (int axis_index) const |
| btScalar | getRelativePivotPosition (int axis_index) const |
| void | setFrames (const btTransform &frameA, const btTransform &frameB) |
| void | setLinearLowerLimit (const btVector3 &linearLower) |
| void | getLinearLowerLimit (btVector3 &linearLower) |
| void | setLinearUpperLimit (const btVector3 &linearUpper) |
| void | getLinearUpperLimit (btVector3 &linearUpper) |
| void | setAngularLowerLimit (const btVector3 &angularLower) |
| void | setAngularLowerLimitReversed (const btVector3 &angularLower) |
| void | getAngularLowerLimit (btVector3 &angularLower) |
| void | getAngularLowerLimitReversed (btVector3 &angularLower) |
| void | setAngularUpperLimit (const btVector3 &angularUpper) |
| void | setAngularUpperLimitReversed (const btVector3 &angularUpper) |
| void | getAngularUpperLimit (btVector3 &angularUpper) |
| void | getAngularUpperLimitReversed (btVector3 &angularUpper) |
| void | setLimit (int axis, btScalar lo, btScalar hi) |
| void | setLimitReversed (int axis, btScalar lo, btScalar hi) |
| bool | isLimited (int limitIndex) |
| void | setRotationOrder (RotateOrder order) |
| RotateOrder | getRotationOrder () |
| void | setAxis (const btVector3 &axis1, const btVector3 &axis2) |
| void | setBounce (int index, btScalar bounce) |
| void | enableMotor (int index, bool onOff) |
| void | setServo (int index, bool onOff) |
| void | setTargetVelocity (int index, btScalar velocity) |
| void | setServoTarget (int index, btScalar target) |
| void | setMaxMotorForce (int index, btScalar force) |
| void | enableSpring (int index, bool onOff) |
| void | setStiffness (int index, btScalar stiffness, bool limitIfNeeded=true) |
| void | setDamping (int index, btScalar damping, bool limitIfNeeded=true) |
| void | setEquilibriumPoint () |
| void | setEquilibriumPoint (int index) |
| void | setEquilibriumPoint (int index, btScalar val) |
| virtual void | setParam (int num, btScalar value, int axis=-1) |
| override the default global value of a parameter (such as ERP or CFM), optionally provide the axis (0..5). More... | |
| virtual btScalar | getParam (int num, int axis=-1) const |
| return the local value of parameter More... | |
 Public Member Functions inherited from btTypedConstraint Public Member Functions inherited from btTypedConstraint | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| virtual | ~btTypedConstraint () |
| btTypedConstraint (btTypedConstraintType type, btRigidBody &rbA) | |
| btTypedConstraint (btTypedConstraintType type, btRigidBody &rbA, btRigidBody &rbB) | |
| int | getOverrideNumSolverIterations () const |
| void | setOverrideNumSolverIterations (int overideNumIterations) |
| override the number of constraint solver iterations used to solve this constraint -1 will use the default number of iterations, as specified in SolverInfo.m_numIterations More... | |
| virtual void | buildJacobian () |
| internal method used by the constraint solver, don't use them directly More... | |
| virtual void | setupSolverConstraint (btConstraintArray &ca, int solverBodyA, int solverBodyB, btScalar timeStep) |
| internal method used by the constraint solver, don't use them directly More... | |
| virtual void | getInfo1 (btConstraintInfo1 *info)=0 |
| internal method used by the constraint solver, don't use them directly More... | |
| virtual void | getInfo2 (btConstraintInfo2 *info)=0 |
| internal method used by the constraint solver, don't use them directly More... | |
| void | internalSetAppliedImpulse (btScalar appliedImpulse) |
| internal method used by the constraint solver, don't use them directly More... | |
| btScalar | internalGetAppliedImpulse () |
| internal method used by the constraint solver, don't use them directly More... | |
| btScalar | getBreakingImpulseThreshold () const |
| void | setBreakingImpulseThreshold (btScalar threshold) |
| bool | isEnabled () const |
| void | setEnabled (bool enabled) |
| virtual void | solveConstraintObsolete (btSolverBody &, btSolverBody &, btScalar) |
| internal method used by the constraint solver, don't use them directly More... | |
| const btRigidBody & | getRigidBodyA () const |
| const btRigidBody & | getRigidBodyB () const |
| btRigidBody & | getRigidBodyA () |
| btRigidBody & | getRigidBodyB () |
| int | getUserConstraintType () const |
| void | setUserConstraintType (int userConstraintType) |
| void | setUserConstraintId (int uid) |
| int | getUserConstraintId () const |
| void | setUserConstraintPtr (void *ptr) |
| void * | getUserConstraintPtr () |
| void | setJointFeedback (btJointFeedback *jointFeedback) |
| const btJointFeedback * | getJointFeedback () const |
| btJointFeedback * | getJointFeedback () |
| int | getUid () const |
| bool | needsFeedback () const |
| void | enableFeedback (bool needsFeedback) |
| enableFeedback will allow to read the applied linear and angular impulse use getAppliedImpulse, getAppliedLinearImpulse and getAppliedAngularImpulse to read feedback information More... | |
| btScalar | getAppliedImpulse () const |
| getAppliedImpulse is an estimated total applied impulse. More... | |
| btTypedConstraintType | getConstraintType () const |
| void | setDbgDrawSize (btScalar dbgDrawSize) |
| btScalar | getDbgDrawSize () |
| virtual void | setParam (int num, btScalar value, int axis=-1)=0 |
| override the default global value of a parameter (such as ERP or CFM), optionally provide the axis (0..5). More... | |
| virtual btScalar | getParam (int num, int axis=-1) const =0 |
| return the local value of parameter More... | |
| virtual int | calculateSerializeBufferSize () const |
| virtual const char * | serialize (void *dataBuffer, btSerializer *serializer) const |
| fills the dataBuffer and returns the struct name (and 0 on failure) More... | |
| Public Member Functions inherited from btTypedObject | |
| btTypedObject (int objectType) | |
| int | getObjectType () const |
Static Public Member Functions | |
| static btScalar | btGetMatrixElem (const btMatrix3x3 &mat, int index) |
| static bool | matrixToEulerXYZ (const btMatrix3x3 &mat, btVector3 &xyz) |
| static bool | matrixToEulerXZY (const btMatrix3x3 &mat, btVector3 &xyz) |
| static bool | matrixToEulerYXZ (const btMatrix3x3 &mat, btVector3 &xyz) |
| static bool | matrixToEulerYZX (const btMatrix3x3 &mat, btVector3 &xyz) |
| static bool | matrixToEulerZXY (const btMatrix3x3 &mat, btVector3 &xyz) |
| static bool | matrixToEulerZYX (const btMatrix3x3 &mat, btVector3 &xyz) |
| Static Public Member Functions inherited from btTypedConstraint | |
| static btRigidBody & | getFixedBody () |
Protected Member Functions | |
| btGeneric6DofSpring2Constraint & | operator= (const btGeneric6DofSpring2Constraint &) |
| int | setAngularLimits (btConstraintInfo2 *info, int row_offset, const btTransform &transA, const btTransform &transB, const btVector3 &linVelA, const btVector3 &linVelB, const btVector3 &angVelA, const btVector3 &angVelB) |
| int | setLinearLimits (btConstraintInfo2 *info, int row, const btTransform &transA, const btTransform &transB, const btVector3 &linVelA, const btVector3 &linVelB, const btVector3 &angVelA, const btVector3 &angVelB) |
| void | calculateLinearInfo () |
| void | calculateAngleInfo () |
| void | testAngularLimitMotor (int axis_index) |
| void | calculateJacobi (btRotationalLimitMotor2 *limot, const btTransform &transA, const btTransform &transB, btConstraintInfo2 *info, int srow, btVector3 &ax1, int rotational, int rotAllowed) |
| int | get_limit_motor_info2 (btRotationalLimitMotor2 *limot, const btTransform &transA, const btTransform &transB, const btVector3 &linVelA, const btVector3 &linVelB, const btVector3 &angVelA, const btVector3 &angVelB, btConstraintInfo2 *info, int row, btVector3 &ax1, int rotational, int rotAllowed=false) |
| Protected Member Functions inherited from btTypedConstraint | |
| btScalar | getMotorFactor (btScalar pos, btScalar lowLim, btScalar uppLim, btScalar vel, btScalar timeFact) |
| internal method used by the constraint solver, don't use them directly More... | |
Additional Inherited Members | |
| Public Attributes inherited from btTypedObject | |
| int | m_objectType |
Detailed Description
Definition at line 272 of file btGeneric6DofSpring2Constraint.h.
Constructor & Destructor Documentation
◆ btGeneric6DofSpring2Constraint() [1/2]
| btGeneric6DofSpring2Constraint::btGeneric6DofSpring2Constraint | ( | btRigidBody & | rbA, |
| btRigidBody & | rbB, | ||
| const btTransform & | frameInA, | ||
| const btTransform & | frameInB, | ||
| RotateOrder | rotOrder = RO_XYZ |
||
| ) |
2009 March: btGeneric6DofConstraint refactored by Roman Ponomarev Added support for generic constraint solver through getInfo1/getInfo2 methods
Definition at line 46 of file btGeneric6DofSpring2Constraint.cpp.
◆ btGeneric6DofSpring2Constraint() [2/2]
| btGeneric6DofSpring2Constraint::btGeneric6DofSpring2Constraint | ( | btRigidBody & | rbB, |
| const btTransform & | frameInB, | ||
| RotateOrder | rotOrder = RO_XYZ |
||
| ) |
not providing rigidbody A means implicitly using worldspace for body A
Definition at line 52 of file btGeneric6DofSpring2Constraint.cpp.
Member Function Documentation
◆ BT_DECLARE_ALIGNED_ALLOCATOR()
| btGeneric6DofSpring2Constraint::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
◆ btGetMatrixElem()
|
static |
Definition at line 60 of file btGeneric6DofSpring2Constraint.cpp.
◆ buildJacobian()
|
inlinevirtual |
internal method used by the constraint solver, don't use them directly
Reimplemented from btTypedConstraint.
Definition at line 322 of file btGeneric6DofSpring2Constraint.h.
◆ calculateAngleInfo()
|
protected |
Definition at line 269 of file btGeneric6DofSpring2Constraint.cpp.
◆ calculateJacobi()
|
protected |
Definition at line 637 of file btGeneric6DofSpring2Constraint.cpp.
◆ calculateLinearInfo()
|
protected |
Definition at line 626 of file btGeneric6DofSpring2Constraint.cpp.
◆ calculateSerializeBufferSize()
|
inlinevirtual |
Reimplemented from btTypedConstraint.
Definition at line 583 of file btGeneric6DofSpring2Constraint.h.
◆ calculateTransforms() [1/2]
| void btGeneric6DofSpring2Constraint::calculateTransforms | ( | ) |
Definition at line 411 of file btGeneric6DofSpring2Constraint.cpp.
◆ calculateTransforms() [2/2]
| void btGeneric6DofSpring2Constraint::calculateTransforms | ( | const btTransform & | transA, |
| const btTransform & | transB | ||
| ) |
Definition at line 416 of file btGeneric6DofSpring2Constraint.cpp.
◆ enableMotor()
| void btGeneric6DofSpring2Constraint::enableMotor | ( | int | index, |
| bool | onOff | ||
| ) |
Definition at line 1050 of file btGeneric6DofSpring2Constraint.cpp.
◆ enableSpring()
| void btGeneric6DofSpring2Constraint::enableSpring | ( | int | index, |
| bool | onOff | ||
| ) |
Definition at line 1130 of file btGeneric6DofSpring2Constraint.cpp.
◆ get_limit_motor_info2()
|
protected |
Definition at line 670 of file btGeneric6DofSpring2Constraint.cpp.
◆ getAngle()
|
inline |
Definition at line 350 of file btGeneric6DofSpring2Constraint.h.
◆ getAngularLowerLimit()
|
inline |
Definition at line 374 of file btGeneric6DofSpring2Constraint.h.
◆ getAngularLowerLimitReversed()
|
inline |
Definition at line 380 of file btGeneric6DofSpring2Constraint.h.
◆ getAngularUpperLimit()
|
inline |
Definition at line 398 of file btGeneric6DofSpring2Constraint.h.
◆ getAngularUpperLimitReversed()
|
inline |
Definition at line 404 of file btGeneric6DofSpring2Constraint.h.
◆ getAxis()
|
inline |
Definition at line 347 of file btGeneric6DofSpring2Constraint.h.
◆ getCalculatedTransformA()
|
inline |
Definition at line 336 of file btGeneric6DofSpring2Constraint.h.
◆ getCalculatedTransformB()
|
inline |
Definition at line 338 of file btGeneric6DofSpring2Constraint.h.
◆ getFrameOffsetA() [1/2]
|
inline |
Definition at line 343 of file btGeneric6DofSpring2Constraint.h.
◆ getFrameOffsetA() [2/2]
|
inline |
Definition at line 340 of file btGeneric6DofSpring2Constraint.h.
◆ getFrameOffsetB() [1/2]
|
inline |
Definition at line 344 of file btGeneric6DofSpring2Constraint.h.
◆ getFrameOffsetB() [2/2]
|
inline |
Definition at line 341 of file btGeneric6DofSpring2Constraint.h.
◆ getInfo1()
|
virtual |
internal method used by the constraint solver, don't use them directly
Implements btTypedConstraint.
Definition at line 446 of file btGeneric6DofSpring2Constraint.cpp.
◆ getInfo2()
|
virtual |
internal method used by the constraint solver, don't use them directly
Implements btTypedConstraint.
Definition at line 476 of file btGeneric6DofSpring2Constraint.cpp.
◆ getLinearLowerLimit()
|
inline |
Definition at line 358 of file btGeneric6DofSpring2Constraint.h.
◆ getLinearUpperLimit()
|
inline |
Definition at line 360 of file btGeneric6DofSpring2Constraint.h.
◆ getParam()
|
virtual |
return the local value of parameter
Implements btTypedConstraint.
Definition at line 964 of file btGeneric6DofSpring2Constraint.cpp.
◆ getRelativePivotPosition()
|
inline |
Definition at line 353 of file btGeneric6DofSpring2Constraint.h.
◆ getRotationalLimitMotor()
|
inline |
Definition at line 328 of file btGeneric6DofSpring2Constraint.h.
◆ getRotationOrder()
|
inline |
Definition at line 454 of file btGeneric6DofSpring2Constraint.h.
◆ getTranslationalLimitMotor()
|
inline |
Definition at line 329 of file btGeneric6DofSpring2Constraint.h.
◆ isLimited()
|
inline |
Definition at line 444 of file btGeneric6DofSpring2Constraint.h.
◆ matrixToEulerXYZ()
|
static |
Definition at line 69 of file btGeneric6DofSpring2Constraint.cpp.
◆ matrixToEulerXZY()
|
static |
Definition at line 104 of file btGeneric6DofSpring2Constraint.cpp.
◆ matrixToEulerYXZ()
|
static |
Definition at line 137 of file btGeneric6DofSpring2Constraint.cpp.
◆ matrixToEulerYZX()
|
static |
Definition at line 170 of file btGeneric6DofSpring2Constraint.cpp.
◆ matrixToEulerZXY()
|
static |
Definition at line 203 of file btGeneric6DofSpring2Constraint.cpp.
◆ matrixToEulerZYX()
|
static |
Definition at line 236 of file btGeneric6DofSpring2Constraint.cpp.
◆ operator=()
|
inlineprotected |
Definition at line 298 of file btGeneric6DofSpring2Constraint.h.
◆ serialize()
|
inlinevirtual |
fills the dataBuffer and returns the struct name (and 0 on failure)
Reimplemented from btTypedConstraint.
Definition at line 588 of file btGeneric6DofSpring2Constraint.h.
◆ setAngularLimits()
|
protected |
Definition at line 546 of file btGeneric6DofSpring2Constraint.cpp.
◆ setAngularLowerLimit()
|
inline |
Definition at line 362 of file btGeneric6DofSpring2Constraint.h.
◆ setAngularLowerLimitReversed()
|
inline |
Definition at line 368 of file btGeneric6DofSpring2Constraint.h.
◆ setAngularUpperLimit()
|
inline |
Definition at line 386 of file btGeneric6DofSpring2Constraint.h.
◆ setAngularUpperLimitReversed()
|
inline |
Definition at line 392 of file btGeneric6DofSpring2Constraint.h.
◆ setAxis()
Definition at line 1022 of file btGeneric6DofSpring2Constraint.cpp.
◆ setBounce()
| void btGeneric6DofSpring2Constraint::setBounce | ( | int | index, |
| btScalar | bounce | ||
| ) |
Definition at line 1041 of file btGeneric6DofSpring2Constraint.cpp.
◆ setDamping()
| void btGeneric6DofSpring2Constraint::setDamping | ( | int | index, |
| btScalar | damping, | ||
| bool | limitIfNeeded = true |
||
| ) |
Definition at line 1154 of file btGeneric6DofSpring2Constraint.cpp.
◆ setEquilibriumPoint() [1/3]
| void btGeneric6DofSpring2Constraint::setEquilibriumPoint | ( | ) |
Definition at line 1169 of file btGeneric6DofSpring2Constraint.cpp.
◆ setEquilibriumPoint() [2/3]
| void btGeneric6DofSpring2Constraint::setEquilibriumPoint | ( | int | index | ) |
Definition at line 1179 of file btGeneric6DofSpring2Constraint.cpp.
◆ setEquilibriumPoint() [3/3]
| void btGeneric6DofSpring2Constraint::setEquilibriumPoint | ( | int | index, |
| btScalar | val | ||
| ) |
Definition at line 1189 of file btGeneric6DofSpring2Constraint.cpp.
◆ setFrames()
| void btGeneric6DofSpring2Constraint::setFrames | ( | const btTransform & | frameA, |
| const btTransform & | frameB | ||
| ) |
Definition at line 618 of file btGeneric6DofSpring2Constraint.cpp.
◆ setLimit()
Definition at line 412 of file btGeneric6DofSpring2Constraint.h.
◆ setLimitReversed()
Definition at line 428 of file btGeneric6DofSpring2Constraint.h.
◆ setLinearLimits()
|
protected |
Definition at line 490 of file btGeneric6DofSpring2Constraint.cpp.
◆ setLinearLowerLimit()
|
inline |
Definition at line 357 of file btGeneric6DofSpring2Constraint.h.
◆ setLinearUpperLimit()
|
inline |
Definition at line 359 of file btGeneric6DofSpring2Constraint.h.
◆ setMaxMotorForce()
| void btGeneric6DofSpring2Constraint::setMaxMotorForce | ( | int | index, |
| btScalar | force | ||
| ) |
Definition at line 1121 of file btGeneric6DofSpring2Constraint.cpp.
◆ setParam()
|
virtual |
override the default global value of a parameter (such as ERP or CFM), optionally provide the axis (0..5).
If no axis is provided, it uses the default axis for this constraint.
Implements btTypedConstraint.
Definition at line 907 of file btGeneric6DofSpring2Constraint.cpp.
◆ setRotationOrder()
|
inline |
Definition at line 453 of file btGeneric6DofSpring2Constraint.h.
◆ setServo()
| void btGeneric6DofSpring2Constraint::setServo | ( | int | index, |
| bool | onOff | ||
| ) |
Definition at line 1059 of file btGeneric6DofSpring2Constraint.cpp.
◆ setServoTarget()
| void btGeneric6DofSpring2Constraint::setServoTarget | ( | int | index, |
| btScalar | target | ||
| ) |
Definition at line 1077 of file btGeneric6DofSpring2Constraint.cpp.
◆ setStiffness()
| void btGeneric6DofSpring2Constraint::setStiffness | ( | int | index, |
| btScalar | stiffness, | ||
| bool | limitIfNeeded = true |
||
| ) |
Definition at line 1139 of file btGeneric6DofSpring2Constraint.cpp.
◆ setTargetVelocity()
| void btGeneric6DofSpring2Constraint::setTargetVelocity | ( | int | index, |
| btScalar | velocity | ||
| ) |
Definition at line 1068 of file btGeneric6DofSpring2Constraint.cpp.
◆ testAngularLimitMotor()
|
protected |
Definition at line 438 of file btGeneric6DofSpring2Constraint.cpp.
Member Data Documentation
◆ m_angularLimits
|
protected |
Definition at line 283 of file btGeneric6DofSpring2Constraint.h.
◆ m_calculatedAxis
|
protected |
Definition at line 291 of file btGeneric6DofSpring2Constraint.h.
◆ m_calculatedAxisAngleDiff
|
protected |
Definition at line 290 of file btGeneric6DofSpring2Constraint.h.
◆ m_calculatedLinearDiff
|
protected |
Definition at line 292 of file btGeneric6DofSpring2Constraint.h.
◆ m_calculatedTransformA
|
protected |
Definition at line 288 of file btGeneric6DofSpring2Constraint.h.
◆ m_calculatedTransformB
|
protected |
Definition at line 289 of file btGeneric6DofSpring2Constraint.h.
◆ m_factA
|
protected |
Definition at line 293 of file btGeneric6DofSpring2Constraint.h.
◆ m_factB
|
protected |
Definition at line 294 of file btGeneric6DofSpring2Constraint.h.
◆ m_flags
|
protected |
Definition at line 296 of file btGeneric6DofSpring2Constraint.h.
◆ m_frameInA
|
protected |
Definition at line 276 of file btGeneric6DofSpring2Constraint.h.
◆ m_frameInB
|
protected |
Definition at line 277 of file btGeneric6DofSpring2Constraint.h.
◆ m_hasStaticBody
|
protected |
Definition at line 295 of file btGeneric6DofSpring2Constraint.h.
◆ m_jacAng
|
protected |
Definition at line 280 of file btGeneric6DofSpring2Constraint.h.
◆ m_jacLinear
|
protected |
Definition at line 279 of file btGeneric6DofSpring2Constraint.h.
◆ m_linearLimits
|
protected |
Definition at line 282 of file btGeneric6DofSpring2Constraint.h.
◆ m_rotateOrder
|
protected |
Definition at line 285 of file btGeneric6DofSpring2Constraint.h.
The documentation for this class was generated from the following files: