Structure for containing Boxes.
More...
#include <btGImpactQuantizedBvh.h>
|
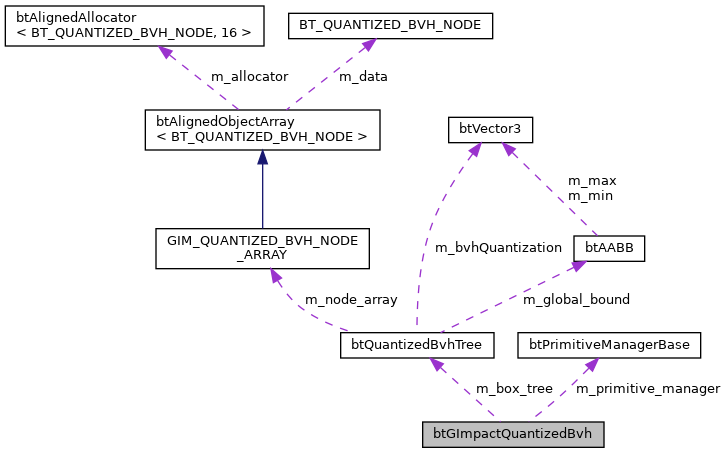
| btQuantizedBvhTree | m_box_tree |
| |
| btPrimitiveManagerBase * | m_primitive_manager |
| |
| void | update () |
| | node manager prototype functions More...
|
| |
| void | buildSet () |
| | this rebuild the entire set More...
|
| |
| bool | boxQuery (const btAABB &box, btAlignedObjectArray< int > &collided_results) const |
| | returns the indices of the primitives in the m_primitive_manager More...
|
| |
| bool | boxQueryTrans (const btAABB &box, const btTransform &transform, btAlignedObjectArray< int > &collided_results) const |
| | returns the indices of the primitives in the m_primitive_manager More...
|
| |
| bool | rayQuery (const btVector3 &ray_dir, const btVector3 &ray_origin, btAlignedObjectArray< int > &collided_results) const |
| | returns the indices of the primitives in the m_primitive_manager More...
|
| |
| bool | hasHierarchy () const |
| | tells if this set has hierarcht More...
|
| |
| bool | isTrimesh () const |
| | tells if this set is a trimesh More...
|
| |
| int | getNodeCount () const |
| | node count More...
|
| |
| bool | isLeafNode (int nodeindex) const |
| | tells if the node is a leaf More...
|
| |
| int | getNodeData (int nodeindex) const |
| |
| void | getNodeBound (int nodeindex, btAABB &bound) const |
| |
| void | setNodeBound (int nodeindex, const btAABB &bound) |
| |
| int | getLeftNode (int nodeindex) const |
| |
| int | getRightNode (int nodeindex) const |
| |
| int | getEscapeNodeIndex (int nodeindex) const |
| |
| void | getNodeTriangle (int nodeindex, btPrimitiveTriangle &triangle) const |
| |
| const BT_QUANTIZED_BVH_NODE * | get_node_pointer (int index=0) const |
| |
| static void | find_collision (const btGImpactQuantizedBvh *boxset1, const btTransform &trans1, const btGImpactQuantizedBvh *boxset2, const btTransform &trans2, btPairSet &collision_pairs) |
| |
Structure for containing Boxes.
This class offers an structure for managing a box tree of primitives. Requires a Primitive prototype (like btPrimitiveManagerBase )
Definition at line 156 of file btGImpactQuantizedBvh.h.
◆ btGImpactQuantizedBvh() [1/2]
| btGImpactQuantizedBvh::btGImpactQuantizedBvh |
( |
| ) |
|
|
inline |
◆ btGImpactQuantizedBvh() [2/2]
◆ boxQuery()
◆ boxQueryTrans()
◆ buildSet()
| void btGImpactQuantizedBvh::buildSet |
( |
| ) |
|
◆ find_collision()
◆ get_node_pointer()
◆ getEscapeNodeIndex()
| int btGImpactQuantizedBvh::getEscapeNodeIndex |
( |
int |
nodeindex | ) |
const |
|
inline |
◆ getGlobalBox()
| btAABB btGImpactQuantizedBvh::getGlobalBox |
( |
| ) |
const |
|
inline |
◆ getLeftNode()
| int btGImpactQuantizedBvh::getLeftNode |
( |
int |
nodeindex | ) |
const |
|
inline |
◆ getNodeBound()
| void btGImpactQuantizedBvh::getNodeBound |
( |
int |
nodeindex, |
|
|
btAABB & |
bound |
|
) |
| const |
|
inline |
◆ getNodeCount()
| int btGImpactQuantizedBvh::getNodeCount |
( |
| ) |
const |
|
inline |
◆ getNodeData()
| int btGImpactQuantizedBvh::getNodeData |
( |
int |
nodeindex | ) |
const |
|
inline |
◆ getNodeTriangle()
| void btGImpactQuantizedBvh::getNodeTriangle |
( |
int |
nodeindex, |
|
|
btPrimitiveTriangle & |
triangle |
|
) |
| const |
|
inline |
◆ getPrimitiveManager()
◆ getRightNode()
| int btGImpactQuantizedBvh::getRightNode |
( |
int |
nodeindex | ) |
const |
|
inline |
◆ hasHierarchy()
| bool btGImpactQuantizedBvh::hasHierarchy |
( |
| ) |
const |
|
inline |
◆ isLeafNode()
| bool btGImpactQuantizedBvh::isLeafNode |
( |
int |
nodeindex | ) |
const |
|
inline |
◆ isTrimesh()
| bool btGImpactQuantizedBvh::isTrimesh |
( |
| ) |
const |
|
inline |
◆ rayQuery()
◆ refit()
| void btGImpactQuantizedBvh::refit |
( |
| ) |
|
|
protected |
◆ setNodeBound()
| void btGImpactQuantizedBvh::setNodeBound |
( |
int |
nodeindex, |
|
|
const btAABB & |
bound |
|
) |
| |
|
inline |
◆ setPrimitiveManager()
◆ update()
| void btGImpactQuantizedBvh::update |
( |
| ) |
|
|
inline |
◆ m_box_tree
◆ m_primitive_manager
The documentation for this class was generated from the following files: