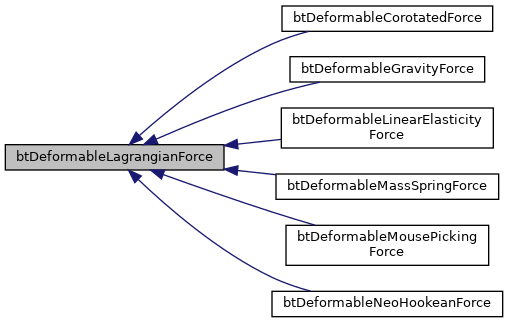
#include <btDeformableLagrangianForce.h>
|
| | btDeformableLagrangianForce () |
| |
| virtual | ~btDeformableLagrangianForce () |
| |
| virtual void | addScaledForces (btScalar scale, TVStack &force)=0 |
| |
| virtual void | addScaledDampingForceDifferential (btScalar scale, const TVStack &dv, TVStack &df)=0 |
| |
| virtual void | buildDampingForceDifferentialDiagonal (btScalar scale, TVStack &diagA)=0 |
| |
| virtual void | addScaledElasticForceDifferential (btScalar scale, const TVStack &dx, TVStack &df)=0 |
| |
| virtual void | addScaledExplicitForce (btScalar scale, TVStack &force)=0 |
| |
| virtual void | addScaledDampingForce (btScalar scale, TVStack &force)=0 |
| |
| virtual void | addScaledHessian (btScalar scale) |
| |
| virtual btDeformableLagrangianForceType | getForceType ()=0 |
| |
| virtual void | reinitialize (bool nodeUpdated) |
| |
| virtual int | getNumNodes () |
| |
| virtual void | addSoftBody (btSoftBody *psb) |
| |
| virtual void | removeSoftBody (btSoftBody *psb) |
| |
| virtual void | setIndices (const btAlignedObjectArray< btSoftBody::Node * > *nodes) |
| |
| virtual btMatrix3x3 | Ds (int id0, int id1, int id2, int id3, const TVStack &dx) |
| |
| virtual btMatrix3x3 | DsFromVelocity (const btSoftBody::Node *n0, const btSoftBody::Node *n1, const btSoftBody::Node *n2, const btSoftBody::Node *n3) |
| |
| virtual void | testDerivative () |
| |
| virtual void | testHessian () |
| |
| virtual double | totalElasticEnergy (btScalar dt) |
| |
| virtual double | totalDampingEnergy (btScalar dt) |
| |
| virtual double | totalEnergy (btScalar dt) |
| |
◆ TVStack
◆ btDeformableLagrangianForce()
| btDeformableLagrangianForce::btDeformableLagrangianForce |
( |
| ) |
|
|
inline |
◆ ~btDeformableLagrangianForce()
| virtual btDeformableLagrangianForce::~btDeformableLagrangianForce |
( |
| ) |
|
|
inlinevirtual |
◆ addScaledDampingForce()
| virtual void btDeformableLagrangianForce::addScaledDampingForce |
( |
btScalar |
scale, |
|
|
TVStack & |
force |
|
) |
| |
|
pure virtual |
◆ addScaledDampingForceDifferential()
| virtual void btDeformableLagrangianForce::addScaledDampingForceDifferential |
( |
btScalar |
scale, |
|
|
const TVStack & |
dv, |
|
|
TVStack & |
df |
|
) |
| |
|
pure virtual |
◆ addScaledElasticForceDifferential()
| virtual void btDeformableLagrangianForce::addScaledElasticForceDifferential |
( |
btScalar |
scale, |
|
|
const TVStack & |
dx, |
|
|
TVStack & |
df |
|
) |
| |
|
pure virtual |
◆ addScaledExplicitForce()
| virtual void btDeformableLagrangianForce::addScaledExplicitForce |
( |
btScalar |
scale, |
|
|
TVStack & |
force |
|
) |
| |
|
pure virtual |
◆ addScaledForces()
| virtual void btDeformableLagrangianForce::addScaledForces |
( |
btScalar |
scale, |
|
|
TVStack & |
force |
|
) |
| |
|
pure virtual |
◆ addScaledHessian()
| virtual void btDeformableLagrangianForce::addScaledHessian |
( |
btScalar |
scale | ) |
|
|
inlinevirtual |
◆ addSoftBody()
| virtual void btDeformableLagrangianForce::addSoftBody |
( |
btSoftBody * |
psb | ) |
|
|
inlinevirtual |
◆ buildDampingForceDifferentialDiagonal()
| virtual void btDeformableLagrangianForce::buildDampingForceDifferentialDiagonal |
( |
btScalar |
scale, |
|
|
TVStack & |
diagA |
|
) |
| |
|
pure virtual |
◆ Ds()
| virtual btMatrix3x3 btDeformableLagrangianForce::Ds |
( |
int |
id0, |
|
|
int |
id1, |
|
|
int |
id2, |
|
|
int |
id3, |
|
|
const TVStack & |
dx |
|
) |
| |
|
inlinevirtual |
◆ DsFromVelocity()
◆ getForceType()
◆ getNumNodes()
| virtual int btDeformableLagrangianForce::getNumNodes |
( |
| ) |
|
|
inlinevirtual |
◆ reinitialize()
| virtual void btDeformableLagrangianForce::reinitialize |
( |
bool |
nodeUpdated | ) |
|
|
inlinevirtual |
◆ removeSoftBody()
| virtual void btDeformableLagrangianForce::removeSoftBody |
( |
btSoftBody * |
psb | ) |
|
|
inlinevirtual |
◆ setIndices()
◆ testDerivative()
| virtual void btDeformableLagrangianForce::testDerivative |
( |
| ) |
|
|
inlinevirtual |
◆ testHessian()
| virtual void btDeformableLagrangianForce::testHessian |
( |
| ) |
|
|
inlinevirtual |
◆ totalDampingEnergy()
| virtual double btDeformableLagrangianForce::totalDampingEnergy |
( |
btScalar |
dt | ) |
|
|
inlinevirtual |
◆ totalElasticEnergy()
| virtual double btDeformableLagrangianForce::totalElasticEnergy |
( |
btScalar |
dt | ) |
|
|
inlinevirtual |
◆ totalEnergy()
| virtual double btDeformableLagrangianForce::totalEnergy |
( |
btScalar |
dt | ) |
|
|
inlinevirtual |
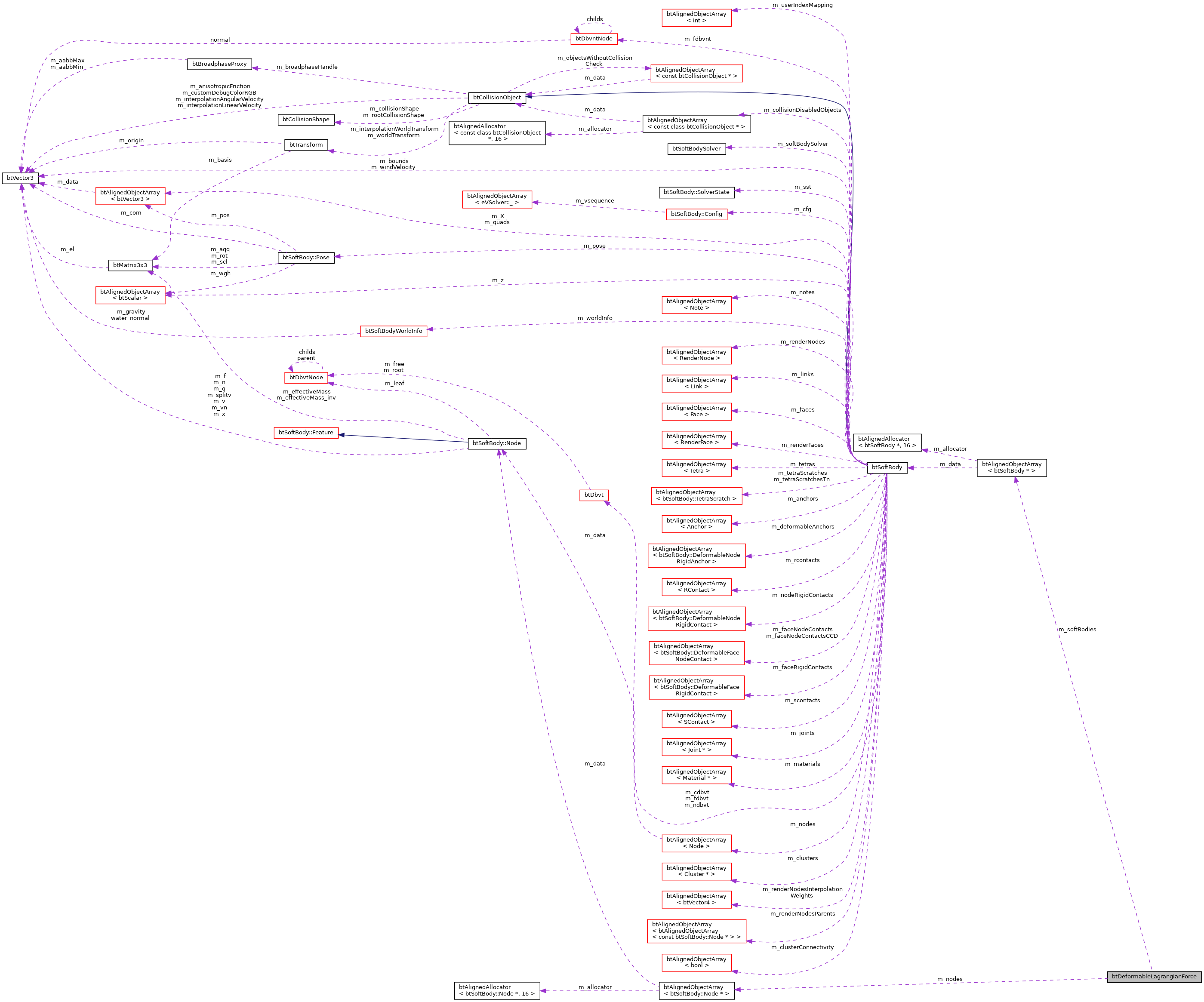
◆ m_nodes
◆ m_softBodies
The documentation for this class was generated from the following file: