#include <btDeformableContactConstraint.h>
Public Member Functions | |
| btDeformableContactConstraint (const btVector3 &normal, const btContactSolverInfo &infoGlobal) | |
| btDeformableContactConstraint (bool isStatic, const btVector3 &normal, const btContactSolverInfo &infoGlobal) | |
| btDeformableContactConstraint () | |
| btDeformableContactConstraint (const btDeformableContactConstraint &other) | |
| virtual | ~btDeformableContactConstraint () |
| virtual btScalar | solveConstraint (const btContactSolverInfo &infoGlobal)=0 |
| virtual btVector3 | getVa () const =0 |
| virtual btVector3 | getVb () const =0 |
| virtual btVector3 | getDv (const btSoftBody::Node *) const =0 |
| virtual void | applyImpulse (const btVector3 &impulse)=0 |
| virtual void | setPenetrationScale (btScalar scale)=0 |
Public Attributes | |
| bool | m_static |
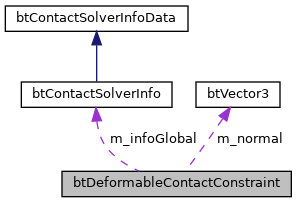
| const btContactSolverInfo * | m_infoGlobal |
| btVector3 | m_normal |
Detailed Description
Definition at line 21 of file btDeformableContactConstraint.h.
Constructor & Destructor Documentation
◆ btDeformableContactConstraint() [1/4]
|
inline |
Definition at line 32 of file btDeformableContactConstraint.h.
◆ btDeformableContactConstraint() [2/4]
|
inline |
Definition at line 36 of file btDeformableContactConstraint.h.
◆ btDeformableContactConstraint() [3/4]
|
inline |
Definition at line 40 of file btDeformableContactConstraint.h.
◆ btDeformableContactConstraint() [4/4]
|
inline |
Definition at line 42 of file btDeformableContactConstraint.h.
◆ ~btDeformableContactConstraint()
|
inlinevirtual |
Definition at line 47 of file btDeformableContactConstraint.h.
Member Function Documentation
◆ applyImpulse()
|
pure virtual |
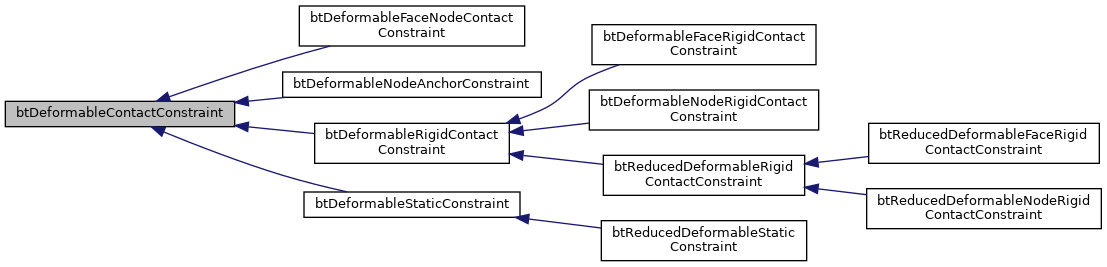
Implemented in btDeformableStaticConstraint, btDeformableNodeAnchorConstraint, btDeformableNodeRigidContactConstraint, btDeformableFaceRigidContactConstraint, btDeformableFaceNodeContactConstraint, btReducedDeformableStaticConstraint, btReducedDeformableRigidContactConstraint, btReducedDeformableNodeRigidContactConstraint, and btReducedDeformableFaceRigidContactConstraint.
◆ getDv()
|
pure virtual |
◆ getVa()
|
pure virtual |
◆ getVb()
|
pure virtual |
◆ setPenetrationScale()
|
pure virtual |
◆ solveConstraint()
|
pure virtual |
Member Data Documentation
◆ m_infoGlobal
| const btContactSolverInfo* btDeformableContactConstraint::m_infoGlobal |
Definition at line 27 of file btDeformableContactConstraint.h.
◆ m_normal
| btVector3 btDeformableContactConstraint::m_normal |
Definition at line 30 of file btDeformableContactConstraint.h.
◆ m_static
| bool btDeformableContactConstraint::m_static |
Definition at line 26 of file btDeformableContactConstraint.h.
The documentation for this class was generated from the following file: