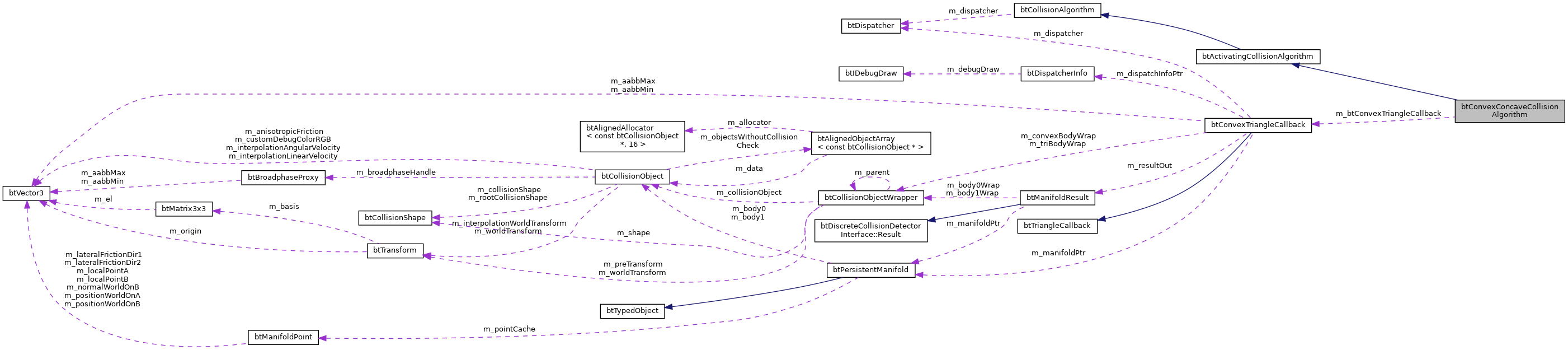
btConvexConcaveCollisionAlgorithm supports collision between convex shapes and (concave) trianges meshes.
More...
#include <btConvexConcaveCollisionAlgorithm.h>
|
| | BT_DECLARE_ALIGNED_ALLOCATOR () |
| |
| | btConvexConcaveCollisionAlgorithm (const btCollisionAlgorithmConstructionInfo &ci, const btCollisionObjectWrapper *body0Wrap, const btCollisionObjectWrapper *body1Wrap, bool isSwapped) |
| |
| virtual | ~btConvexConcaveCollisionAlgorithm () |
| |
| virtual void | processCollision (const btCollisionObjectWrapper *body0Wrap, const btCollisionObjectWrapper *body1Wrap, const btDispatcherInfo &dispatchInfo, btManifoldResult *resultOut) |
| |
| btScalar | calculateTimeOfImpact (btCollisionObject *body0, btCollisionObject *body1, const btDispatcherInfo &dispatchInfo, btManifoldResult *resultOut) |
| |
| virtual void | getAllContactManifolds (btManifoldArray &manifoldArray) |
| |
| void | clearCache () |
| |
| virtual | ~btActivatingCollisionAlgorithm () |
| |
| | btCollisionAlgorithm () |
| |
| | btCollisionAlgorithm (const btCollisionAlgorithmConstructionInfo &ci) |
| |
| virtual | ~btCollisionAlgorithm () |
| |
| virtual void | processCollision (const btCollisionObjectWrapper *body0Wrap, const btCollisionObjectWrapper *body1Wrap, const btDispatcherInfo &dispatchInfo, btManifoldResult *resultOut)=0 |
| |
| virtual btScalar | calculateTimeOfImpact (btCollisionObject *body0, btCollisionObject *body1, const btDispatcherInfo &dispatchInfo, btManifoldResult *resultOut)=0 |
| |
| virtual void | getAllContactManifolds (btManifoldArray &manifoldArray)=0 |
| |
btConvexConcaveCollisionAlgorithm supports collision between convex shapes and (concave) trianges meshes.
Definition at line 76 of file btConvexConcaveCollisionAlgorithm.h.
◆ btConvexConcaveCollisionAlgorithm()
◆ ~btConvexConcaveCollisionAlgorithm()
| btConvexConcaveCollisionAlgorithm::~btConvexConcaveCollisionAlgorithm |
( |
| ) |
|
|
virtual |
◆ BT_DECLARE_ALIGNED_ALLOCATOR()
| btConvexConcaveCollisionAlgorithm::BT_DECLARE_ALIGNED_ALLOCATOR |
( |
| ) |
|
◆ calculateTimeOfImpact()
◆ clearCache()
| void btConvexConcaveCollisionAlgorithm::clearCache |
( |
| ) |
|
◆ getAllContactManifolds()
| void btConvexConcaveCollisionAlgorithm::getAllContactManifolds |
( |
btManifoldArray & |
manifoldArray | ) |
|
|
virtual |
◆ processCollision()
◆ m_btConvexTriangleCallback
◆ m_isSwapped
| bool btConvexConcaveCollisionAlgorithm::m_isSwapped |
|
private |
The documentation for this class was generated from the following files:
 Protected Member Functions inherited from btActivatingCollisionAlgorithm
Protected Member Functions inherited from btActivatingCollisionAlgorithm