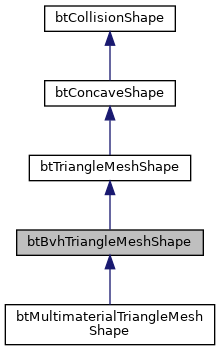
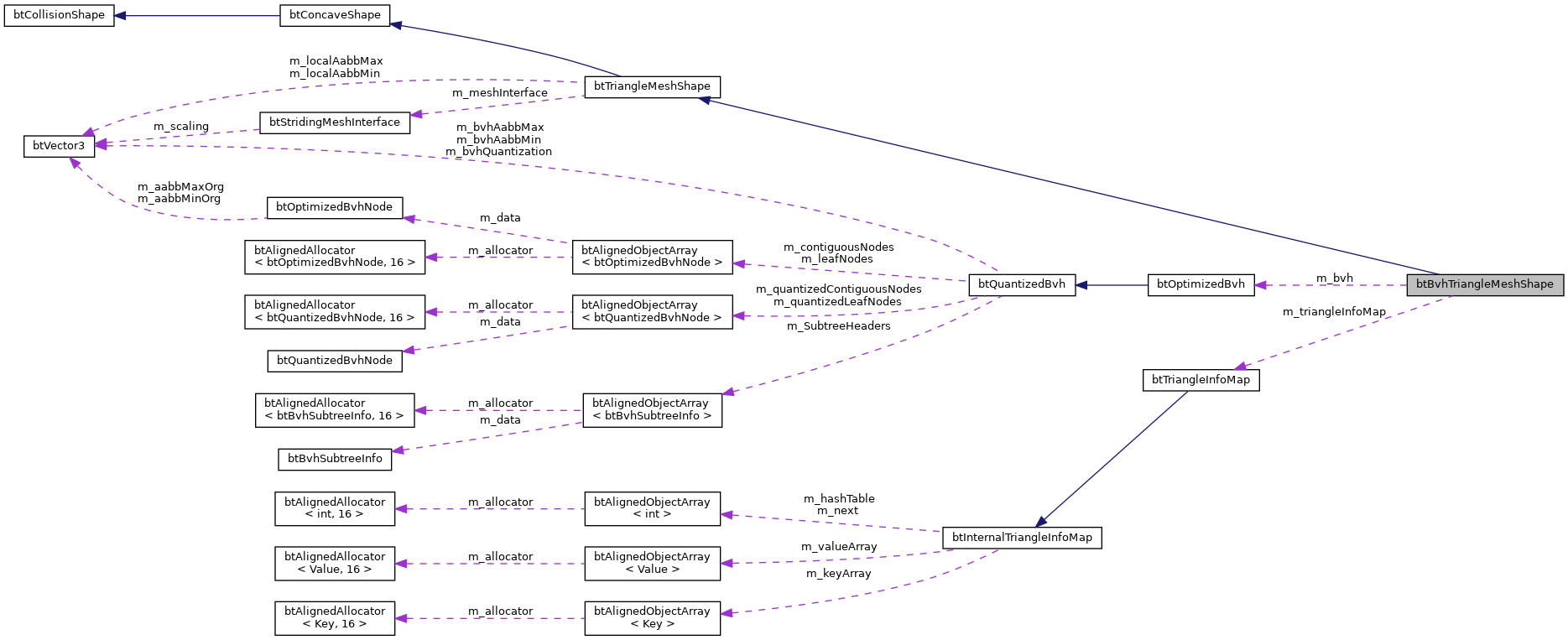
The btBvhTriangleMeshShape is a static-triangle mesh shape, it can only be used for fixed/non-moving objects. More...
#include <btBvhTriangleMeshShape.h>
Public Member Functions | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| btBvhTriangleMeshShape (btStridingMeshInterface *meshInterface, bool useQuantizedAabbCompression, bool buildBvh=true) | |
| Bvh Concave triangle mesh is a static-triangle mesh shape with Bounding Volume Hierarchy optimization. More... | |
| btBvhTriangleMeshShape (btStridingMeshInterface *meshInterface, bool useQuantizedAabbCompression, const btVector3 &bvhAabbMin, const btVector3 &bvhAabbMax, bool buildBvh=true) | |
| optionally pass in a larger bvh aabb, used for quantization. This allows for deformations within this aabb More... | |
| virtual | ~btBvhTriangleMeshShape () |
| bool | getOwnsBvh () const |
| void | performRaycast (btTriangleCallback *callback, const btVector3 &raySource, const btVector3 &rayTarget) |
| void | performConvexcast (btTriangleCallback *callback, const btVector3 &boxSource, const btVector3 &boxTarget, const btVector3 &boxMin, const btVector3 &boxMax) |
| virtual void | processAllTriangles (btTriangleCallback *callback, const btVector3 &aabbMin, const btVector3 &aabbMax) const |
| void | refitTree (const btVector3 &aabbMin, const btVector3 &aabbMax) |
| void | partialRefitTree (const btVector3 &aabbMin, const btVector3 &aabbMax) |
| for a fast incremental refit of parts of the tree. Note: the entire AABB of the tree will become more conservative, it never shrinks More... | |
| virtual const char * | getName () const |
| virtual void | setLocalScaling (const btVector3 &scaling) |
| btOptimizedBvh * | getOptimizedBvh () |
| void | setOptimizedBvh (btOptimizedBvh *bvh, const btVector3 &localScaling=btVector3(1, 1, 1)) |
| void | buildOptimizedBvh () |
| bool | usesQuantizedAabbCompression () const |
| void | setTriangleInfoMap (btTriangleInfoMap *triangleInfoMap) |
| const btTriangleInfoMap * | getTriangleInfoMap () const |
| btTriangleInfoMap * | getTriangleInfoMap () |
| virtual int | calculateSerializeBufferSize () const |
| virtual const char * | serialize (void *dataBuffer, btSerializer *serializer) const |
| fills the dataBuffer and returns the struct name (and 0 on failure) More... | |
| virtual void | serializeSingleBvh (btSerializer *serializer) const |
| virtual void | serializeSingleTriangleInfoMap (btSerializer *serializer) const |
 Public Member Functions inherited from btTriangleMeshShape Public Member Functions inherited from btTriangleMeshShape | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| virtual | ~btTriangleMeshShape () |
| virtual btVector3 | localGetSupportingVertex (const btVector3 &vec) const |
| virtual btVector3 | localGetSupportingVertexWithoutMargin (const btVector3 &vec) const |
| void | recalcLocalAabb () |
| virtual void | getAabb (const btTransform &t, btVector3 &aabbMin, btVector3 &aabbMax) const |
| getAabb returns the axis aligned bounding box in the coordinate frame of the given transform t. More... | |
| virtual void | processAllTriangles (btTriangleCallback *callback, const btVector3 &aabbMin, const btVector3 &aabbMax) const |
| virtual void | calculateLocalInertia (btScalar mass, btVector3 &inertia) const |
| virtual void | setLocalScaling (const btVector3 &scaling) |
| virtual const btVector3 & | getLocalScaling () const |
| btStridingMeshInterface * | getMeshInterface () |
| const btStridingMeshInterface * | getMeshInterface () const |
| const btVector3 & | getLocalAabbMin () const |
| const btVector3 & | getLocalAabbMax () const |
| virtual const char * | getName () const |
| Public Member Functions inherited from btConcaveShape | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| btConcaveShape () | |
| virtual | ~btConcaveShape () |
| virtual void | processAllTriangles (btTriangleCallback *callback, const btVector3 &aabbMin, const btVector3 &aabbMax) const =0 |
| virtual btScalar | getMargin () const |
| virtual void | setMargin (btScalar collisionMargin) |
| Public Member Functions inherited from btCollisionShape | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| btCollisionShape () | |
| virtual | ~btCollisionShape () |
| virtual void | getAabb (const btTransform &t, btVector3 &aabbMin, btVector3 &aabbMax) const =0 |
| getAabb returns the axis aligned bounding box in the coordinate frame of the given transform t. More... | |
| virtual void | getBoundingSphere (btVector3 ¢er, btScalar &radius) const |
| virtual btScalar | getAngularMotionDisc () const |
| getAngularMotionDisc returns the maximum radius needed for Conservative Advancement to handle time-of-impact with rotations. More... | |
| virtual btScalar | getContactBreakingThreshold (btScalar defaultContactThresholdFactor) const |
| void | calculateTemporalAabb (const btTransform &curTrans, const btVector3 &linvel, const btVector3 &angvel, btScalar timeStep, btVector3 &temporalAabbMin, btVector3 &temporalAabbMax) const |
| calculateTemporalAabb calculates the enclosing aabb for the moving object over interval [0..timeStep) result is conservative More... | |
| bool | isPolyhedral () const |
| bool | isConvex2d () const |
| bool | isConvex () const |
| bool | isNonMoving () const |
| bool | isConcave () const |
| bool | isCompound () const |
| bool | isSoftBody () const |
| bool | isInfinite () const |
| isInfinite is used to catch simulation error (aabb check) More... | |
| virtual void | setLocalScaling (const btVector3 &scaling)=0 |
| virtual const btVector3 & | getLocalScaling () const =0 |
| virtual void | calculateLocalInertia (btScalar mass, btVector3 &inertia) const =0 |
| virtual const char * | getName () const =0 |
| int | getShapeType () const |
| virtual btVector3 | getAnisotropicRollingFrictionDirection () const |
| the getAnisotropicRollingFrictionDirection can be used in combination with setAnisotropicFriction See Bullet/Demos/RollingFrictionDemo for an example More... | |
| virtual void | setMargin (btScalar margin)=0 |
| virtual btScalar | getMargin () const =0 |
| void | setUserPointer (void *userPtr) |
| optional user data pointer More... | |
| void * | getUserPointer () const |
| void | setUserIndex (int index) |
| int | getUserIndex () const |
| void | setUserIndex2 (int index) |
| int | getUserIndex2 () const |
| virtual int | calculateSerializeBufferSize () const |
| virtual const char * | serialize (void *dataBuffer, btSerializer *serializer) const |
| fills the dataBuffer and returns the struct name (and 0 on failure) More... | |
| virtual void | serializeSingleShape (btSerializer *serializer) const |
Private Attributes | |
| btOptimizedBvh * | m_bvh |
| btTriangleInfoMap * | m_triangleInfoMap |
| bool | m_useQuantizedAabbCompression |
| bool | m_ownsBvh |
| bool | m_pad [11] |
Additional Inherited Members | |
| Protected Member Functions inherited from btTriangleMeshShape | |
| btTriangleMeshShape (btStridingMeshInterface *meshInterface) | |
| btTriangleMeshShape constructor has been disabled/protected, so that users will not mistakenly use this class. More... | |
| Protected Attributes inherited from btTriangleMeshShape | |
| btVector3 | m_localAabbMin |
| btVector3 | m_localAabbMax |
| btStridingMeshInterface * | m_meshInterface |
| Protected Attributes inherited from btConcaveShape | |
| btScalar | m_collisionMargin |
| Protected Attributes inherited from btCollisionShape | |
| int | m_shapeType |
| void * | m_userPointer |
| int | m_userIndex |
| int | m_userIndex2 |
Detailed Description
The btBvhTriangleMeshShape is a static-triangle mesh shape, it can only be used for fixed/non-moving objects.
If you required moving concave triangle meshes, it is recommended to perform convex decomposition using HACD, see Bullet/Demos/ConvexDecompositionDemo. Alternatively, you can use btGimpactMeshShape for moving concave triangle meshes. btBvhTriangleMeshShape has several optimizations, such as bounding volume hierarchy and cache friendly traversal for PlayStation 3 Cell SPU. It is recommended to enable useQuantizedAabbCompression for better memory usage. It takes a triangle mesh as input, for example a btTriangleMesh or btTriangleIndexVertexArray. The btBvhTriangleMeshShape class allows for triangle mesh deformations by a refit or partialRefit method. Instead of building the bounding volume hierarchy acceleration structure, it is also possible to serialize (save) and deserialize (load) the structure from disk. See Demos\ConcaveDemo\ConcavePhysicsDemo.cpp for an example.
Definition at line 34 of file btBvhTriangleMeshShape.h.
Constructor & Destructor Documentation
◆ btBvhTriangleMeshShape() [1/2]
| btBvhTriangleMeshShape::btBvhTriangleMeshShape | ( | btStridingMeshInterface * | meshInterface, |
| bool | useQuantizedAabbCompression, | ||
| bool | buildBvh = true |
||
| ) |
Bvh Concave triangle mesh is a static-triangle mesh shape with Bounding Volume Hierarchy optimization.
Uses an interface to access the triangles to allow for sharing graphics/physics triangles.
Definition at line 24 of file btBvhTriangleMeshShape.cpp.
◆ btBvhTriangleMeshShape() [2/2]
| btBvhTriangleMeshShape::btBvhTriangleMeshShape | ( | btStridingMeshInterface * | meshInterface, |
| bool | useQuantizedAabbCompression, | ||
| const btVector3 & | bvhAabbMin, | ||
| const btVector3 & | bvhAabbMax, | ||
| bool | buildBvh = true |
||
| ) |
optionally pass in a larger bvh aabb, used for quantization. This allows for deformations within this aabb
Definition at line 43 of file btBvhTriangleMeshShape.cpp.
◆ ~btBvhTriangleMeshShape()
|
virtual |
Definition at line 81 of file btBvhTriangleMeshShape.cpp.
Member Function Documentation
◆ BT_DECLARE_ALIGNED_ALLOCATOR()
| btBvhTriangleMeshShape::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
◆ buildOptimizedBvh()
| void btBvhTriangleMeshShape::buildOptimizedBvh | ( | ) |
m_localAabbMin/m_localAabbMax is already re-calculated in btTriangleMeshShape. We could just scale aabb, but this needs some more work
Definition at line 340 of file btBvhTriangleMeshShape.cpp.
◆ calculateSerializeBufferSize()
|
inlinevirtual |
Reimplemented from btCollisionShape.
Definition at line 139 of file btBvhTriangleMeshShape.h.
◆ getName()
|
inlinevirtual |
Reimplemented from btTriangleMeshShape.
Reimplemented in btMultimaterialTriangleMeshShape.
Definition at line 74 of file btBvhTriangleMeshShape.h.
◆ getOptimizedBvh()
|
inline |
Definition at line 78 of file btBvhTriangleMeshShape.h.
◆ getOwnsBvh()
|
inline |
Definition at line 58 of file btBvhTriangleMeshShape.h.
◆ getTriangleInfoMap() [1/2]
|
inline |
Definition at line 102 of file btBvhTriangleMeshShape.h.
◆ getTriangleInfoMap() [2/2]
|
inline |
Definition at line 97 of file btBvhTriangleMeshShape.h.
◆ partialRefitTree()
| void btBvhTriangleMeshShape::partialRefitTree | ( | const btVector3 & | aabbMin, |
| const btVector3 & | aabbMax | ||
| ) |
for a fast incremental refit of parts of the tree. Note: the entire AABB of the tree will become more conservative, it never shrinks
Definition at line 66 of file btBvhTriangleMeshShape.cpp.
◆ performConvexcast()
| void btBvhTriangleMeshShape::performConvexcast | ( | btTriangleCallback * | callback, |
| const btVector3 & | boxSource, | ||
| const btVector3 & | boxTarget, | ||
| const btVector3 & | boxMin, | ||
| const btVector3 & | boxMax | ||
| ) |
Definition at line 164 of file btBvhTriangleMeshShape.cpp.
◆ performRaycast()
| void btBvhTriangleMeshShape::performRaycast | ( | btTriangleCallback * | callback, |
| const btVector3 & | raySource, | ||
| const btVector3 & | rayTarget | ||
| ) |
Definition at line 90 of file btBvhTriangleMeshShape.cpp.
◆ processAllTriangles()
|
virtual |
Reimplemented from btTriangleMeshShape.
Definition at line 239 of file btBvhTriangleMeshShape.cpp.
◆ refitTree()
Definition at line 74 of file btBvhTriangleMeshShape.cpp.
◆ serialize()
|
virtual |
fills the dataBuffer and returns the struct name (and 0 on failure)
Reimplemented from btCollisionShape.
Definition at line 370 of file btBvhTriangleMeshShape.cpp.
◆ serializeSingleBvh()
|
virtual |
Definition at line 442 of file btBvhTriangleMeshShape.cpp.
◆ serializeSingleTriangleInfoMap()
|
virtual |
Definition at line 453 of file btBvhTriangleMeshShape.cpp.
◆ setLocalScaling()
|
virtual |
Reimplemented from btTriangleMeshShape.
Definition at line 331 of file btBvhTriangleMeshShape.cpp.
◆ setOptimizedBvh()
| void btBvhTriangleMeshShape::setOptimizedBvh | ( | btOptimizedBvh * | bvh, |
| const btVector3 & | localScaling = btVector3(1, 1, 1) |
||
| ) |
Definition at line 355 of file btBvhTriangleMeshShape.cpp.
◆ setTriangleInfoMap()
|
inline |
Definition at line 92 of file btBvhTriangleMeshShape.h.
◆ usesQuantizedAabbCompression()
|
inline |
Definition at line 87 of file btBvhTriangleMeshShape.h.
Member Data Documentation
◆ m_bvh
|
private |
Definition at line 37 of file btBvhTriangleMeshShape.h.
◆ m_ownsBvh
|
private |
Definition at line 41 of file btBvhTriangleMeshShape.h.
◆ m_pad
|
private |
Definition at line 45 of file btBvhTriangleMeshShape.h.
◆ m_triangleInfoMap
|
private |
Definition at line 38 of file btBvhTriangleMeshShape.h.
◆ m_useQuantizedAabbCompression
|
private |
Definition at line 40 of file btBvhTriangleMeshShape.h.
The documentation for this class was generated from the following files: