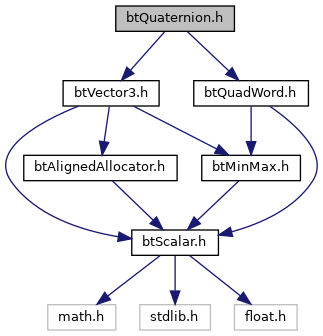
#include "btVector3.h"
#include "btQuadWord.h"
Go to the source code of this file.
|
| btQuaternion | operator* (const btQuaternion &q1, const btQuaternion &q2) |
| | Return the product of two quaternions. More...
|
| |
| btQuaternion | operator* (const btQuaternion &q, const btVector3 &w) |
| |
| btQuaternion | operator* (const btVector3 &w, const btQuaternion &q) |
| |
| btScalar | dot (const btQuaternion &q1, const btQuaternion &q2) |
| | Calculate the dot product between two quaternions. More...
|
| |
| btScalar | length (const btQuaternion &q) |
| | Return the length of a quaternion. More...
|
| |
| btScalar | btAngle (const btQuaternion &q1, const btQuaternion &q2) |
| | Return the angle between two quaternions. More...
|
| |
| btQuaternion | inverse (const btQuaternion &q) |
| | Return the inverse of a quaternion. More...
|
| |
| btQuaternion | slerp (const btQuaternion &q1, const btQuaternion &q2, const btScalar &t) |
| | Return the result of spherical linear interpolation betwen two quaternions. More...
|
| |
| btVector3 | quatRotate (const btQuaternion &rotation, const btVector3 &v) |
| |
| btQuaternion | shortestArcQuat (const btVector3 &v0, const btVector3 &v1) |
| |
| btQuaternion | shortestArcQuatNormalize2 (btVector3 &v0, btVector3 &v1) |
| |
◆ btQuaternionData
◆ btQuaternionDataName
| #define btQuaternionDataName "btQuaternionFloatData" |
◆ btAngle()
Return the angle between two quaternions.
Definition at line 902 of file btQuaternion.h.
◆ dot()
Calculate the dot product between two quaternions.
Definition at line 888 of file btQuaternion.h.
◆ inverse()
◆ length()
◆ operator*() [1/3]
◆ operator*() [2/3]
Return the product of two quaternions.
Definition at line 633 of file btQuaternion.h.
◆ operator*() [3/3]
◆ quatRotate()
◆ shortestArcQuat()
◆ shortestArcQuatNormalize2()
◆ slerp()
Return the result of spherical linear interpolation betwen two quaternions.
- Parameters
-
| q1 | The first quaternion |
| q2 | The second quaternion |
| t | The ration between q1 and q2. t = 0 return q1, t=1 returns q2 Slerp assumes constant velocity between positions. |
Definition at line 920 of file btQuaternion.h.