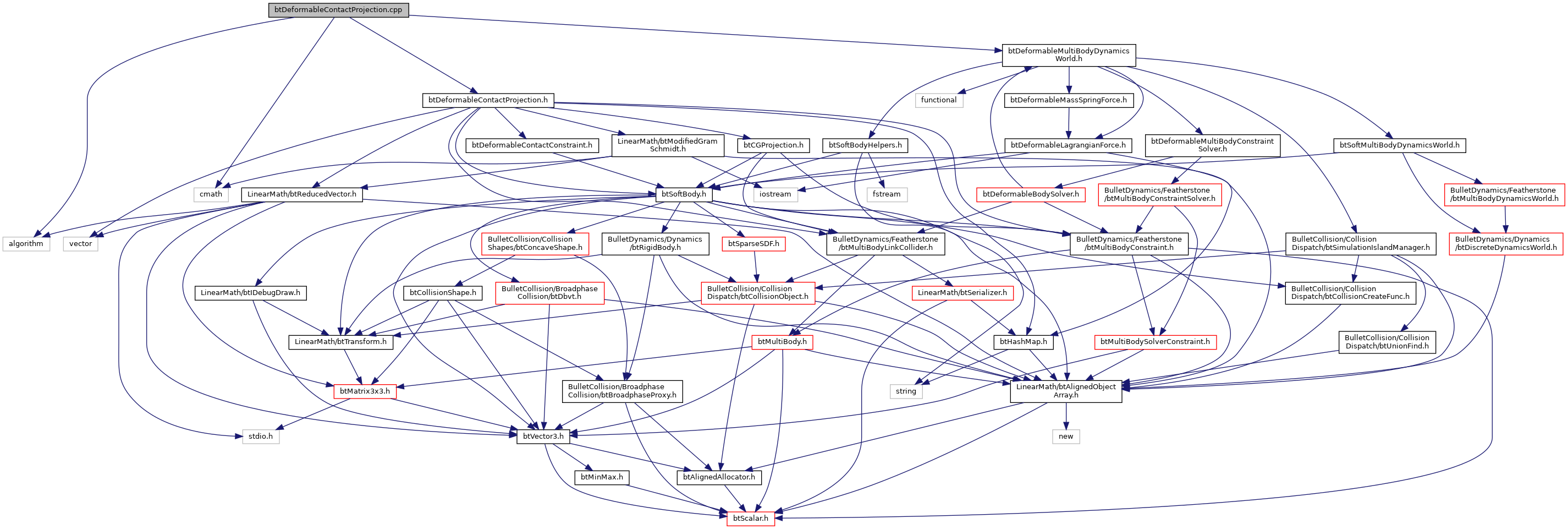
#include "btDeformableContactProjection.h"#include "btDeformableMultiBodyDynamicsWorld.h"#include <algorithm>#include <cmath>
Include dependency graph for btDeformableContactProjection.cpp:
|
Bullet Collision Detection & Physics Library
|
#include "btDeformableContactProjection.h"#include "btDeformableMultiBodyDynamicsWorld.h"#include <algorithm>#include <cmath>