#include "LinearMath/btVector3.h"#include "btJacobianEntry.h"#include "btTypedConstraint.h"#include "BulletCollision/NarrowPhaseCollision/btPersistentManifold.h"
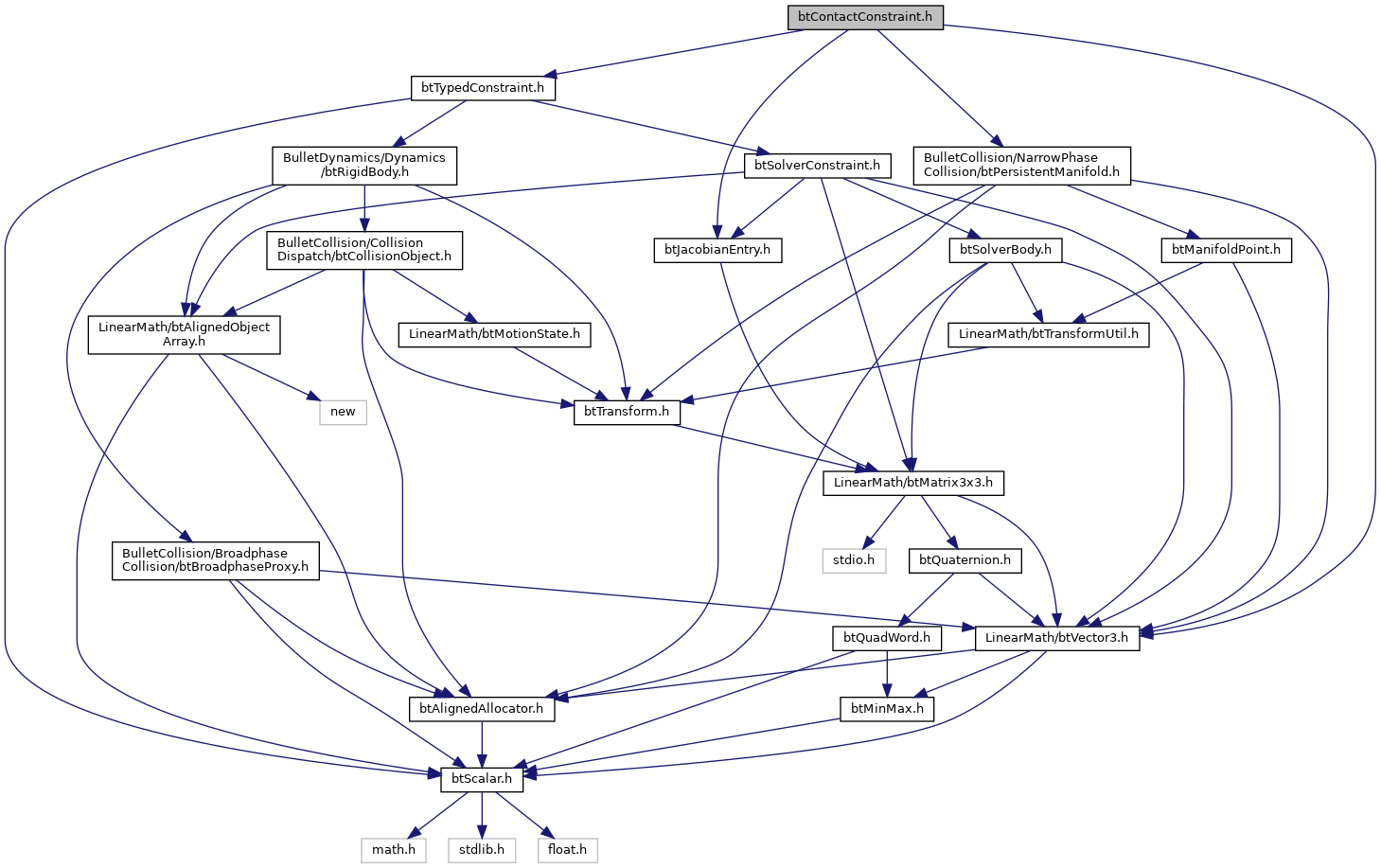
Include dependency graph for btContactConstraint.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | btContactConstraint |
| btContactConstraint can be automatically created to solve contact constraints using the unified btTypedConstraint interface More... | |
Functions | |
| btScalar | resolveSingleCollision (btRigidBody *body1, class btCollisionObject *colObj2, const btVector3 &contactPositionWorld, const btVector3 &contactNormalOnB, const struct btContactSolverInfo &solverInfo, btScalar distance) |
| very basic collision resolution without friction More... | |
| void | resolveSingleBilateral (btRigidBody &body1, const btVector3 &pos1, btRigidBody &body2, const btVector3 &pos2, btScalar distance, const btVector3 &normal, btScalar &impulse, btScalar timeStep) |
| resolveSingleBilateral is an obsolete methods used for vehicle friction between two dynamic objects More... | |
Function Documentation
◆ resolveSingleBilateral()
| void resolveSingleBilateral | ( | btRigidBody & | body1, |
| const btVector3 & | pos1, | ||
| btRigidBody & | body2, | ||
| const btVector3 & | pos2, | ||
| btScalar | distance, | ||
| const btVector3 & | normal, | ||
| btScalar & | impulse, | ||
| btScalar | timeStep | ||
| ) |
resolveSingleBilateral is an obsolete methods used for vehicle friction between two dynamic objects
Definition at line 105 of file btContactConstraint.cpp.
◆ resolveSingleCollision()
| btScalar resolveSingleCollision | ( | btRigidBody * | body1, |
| class btCollisionObject * | colObj2, | ||
| const btVector3 & | contactPositionWorld, | ||
| const btVector3 & | contactNormalOnB, | ||
| const struct btContactSolverInfo & | solverInfo, | ||
| btScalar | distance | ||
| ) |
very basic collision resolution without friction