|
My Project
programmer's documentation
|


•All Data Structures Namespaces Files Functions Variables Typedefs Enumerations Enumerator Macros Modules Pages
|
My Project
programmer's documentation
|
#include "cs_defs.h"#include <assert.h>#include <errno.h>#include <stdio.h>#include <stdarg.h>#include <string.h>#include <float.h>#include <mpi.h>#include "bft_error.h"#include "bft_mem.h"#include "cs_math.h"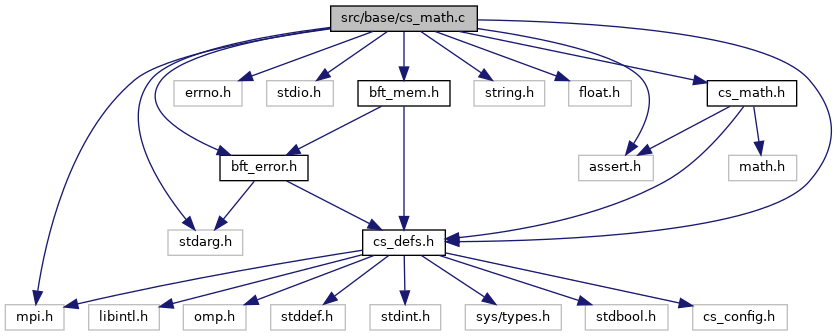
Functions | |
| void | cs_f_math_sym_33_inv_cramer (const cs_real_t s[6], cs_real_t sout[6]) |
| void | cs_f_math_sym_33_product (const cs_real_t s1[6], const cs_real_t s2[6], cs_real_t sout[6]) |
| void | cs_f_math_reduce_sym_prod_33_to_66 (const cs_real_t s[3][3], cs_real_t sout[6][6]) |
| void | cs_math_set_machine_epsilon (void) |
| Compute the value related to the machine precision. More... | |
| double | cs_math_get_machine_epsilon (void) |
| Get the value related to the machine precision. More... | |
| void | cs_math_sym_33_eigen (const cs_real_t m[6], cs_real_t eig_vals[3]) |
| Compute all eigenvalues of a 3x3 symmetric matrix with symmetric storage. More... | |
| void | cs_math_33_eigen (const cs_real_t m[3][3], cs_real_t *eig_ratio, cs_real_t *eig_max) |
| Compute max/min eigenvalues ratio and max. eigenvalue of a 3x3 symmetric matrix with non-symmetric storage. More... | |
| void | cs_math_3_length_unitv (const cs_real_t xa[3], const cs_real_t xb[3], cs_real_t *len, cs_real_3_t unitv) |
| Compute the length (euclidien norm) between two points xa and xb in a cartesian coordinate system of dimension 3. More... | |
| double | cs_math_surftri (const cs_real_t xv[3], const cs_real_t xe[3], const cs_real_t xf[3]) |
| Compute the area of the convex_hull generated by 3 points. This corresponds to the computation of the surface of a triangle. More... | |
| double | cs_math_voltet (const cs_real_t xv[3], const cs_real_t xe[3], const cs_real_t xf[3], const cs_real_t xc[3]) |
| Compute the volume of the convex_hull generated by 4 points. This is equivalent to the computation of the volume of a tetrahedron. More... | |
| void | cs_math_fact_lu (cs_lnum_t n_blocks, int b_size, const cs_real_t *a, cs_real_t *a_lu) |
| Compute LU factorization of an array of dense matrices of identical size. More... | |
| void | cs_math_fw_and_bw_lu (const cs_real_t a_lu[], int n, cs_real_t x[], const cs_real_t b[]) |
| Block Jacobi utilities. Compute forward and backward to solve an LU P*P system. More... | |
Mathematical base functions.
Compute max/min eigenvalues ratio and max. eigenvalue of a 3x3 symmetric matrix with non-symmetric storage.
Based on: Oliver K. Smith "eigenvalues of a symmetric 3x3 matrix", Communication of the ACM (April 1961) (Wikipedia article entitled "Eigenvalue algorithm")
| [in] | m | 3x3 matrix |
| [out] | eig_ratio | max/min |
| [out] | eig_max | max. eigenvalue |
|
inline |
Compute the length (euclidien norm) between two points xa and xb in a cartesian coordinate system of dimension 3.
| [in] | xa | coordinate of the first extremity |
| [in] | xb | coordinate of the second extremity |
| [out] | len | pointer to the length of the vector va -> vb |
| [out] | unitv | unitary vector anlong va -> vb |
Compute LU factorization of an array of dense matrices of identical size.
| [in] | n_blocks | number of blocks |
| [in] | b_size | block size |
| [in] | a | matrix blocks |
| [out] | a_lu | LU factorizations of matrix blocks |
Block Jacobi utilities. Compute forward and backward to solve an LU P*P system.
| [in] | a_lu | matrix LU factorization |
| [in] | n | matrix size |
| [out] | x | solution |
| [out] | b | right hand side |
| double cs_math_get_machine_epsilon | ( | void | ) |
Get the value related to the machine precision.
| void cs_math_set_machine_epsilon | ( | void | ) |
Compute the value related to the machine precision.
|
inline |
Compute the area of the convex_hull generated by 3 points. This corresponds to the computation of the surface of a triangle.
| [in] | xv | coordinates of the first vertex |
| [in] | xe | coordinates of the second vertex |
| [in] | xf | coordinates of the third vertex |
Compute all eigenvalues of a 3x3 symmetric matrix with symmetric storage.
Based on: Oliver K. Smith "eigenvalues of a symmetric 3x3 matrix", Communication of the ACM (April 1961) (Wikipedia article entitled "Eigenvalue algorithm")
| [in] | m | 3x3 symmetric matrix (m11, m22, m33, m12, m23, m13) |
| [out] | eig_vals | size 3 vector |
| double cs_math_voltet | ( | const cs_real_t | xv[3], |
| const cs_real_t | xe[3], | ||
| const cs_real_t | xf[3], | ||
| const cs_real_t | xc[3] | ||
| ) |
Compute the volume of the convex_hull generated by 4 points. This is equivalent to the computation of the volume of a tetrahedron.
| [in] | xv | coordinates of the first vertex |
| [in] | xe | coordinates of the second vertex |
| [in] | xf | coordinates of the third vertex |
| [in] | xc | coordinates of the fourth vertex |
 1.8.16
1.8.16