#include <btSoftBody.h>
Public Member Functions | |
| Body () | |
| Body (Cluster *p) | |
| Body (const btCollisionObject *colObj) | |
| void | activate () const |
| const btMatrix3x3 & | invWorldInertia () const |
| btScalar | invMass () const |
| const btTransform & | xform () const |
| btVector3 | linearVelocity () const |
| btVector3 | angularVelocity (const btVector3 &rpos) const |
| btVector3 | angularVelocity () const |
| btVector3 | velocity (const btVector3 &rpos) const |
| void | applyVImpulse (const btVector3 &impulse, const btVector3 &rpos) const |
| void | applyDImpulse (const btVector3 &impulse, const btVector3 &rpos) const |
| void | applyImpulse (const Impulse &impulse, const btVector3 &rpos) const |
| void | applyVAImpulse (const btVector3 &impulse) const |
| void | applyDAImpulse (const btVector3 &impulse) const |
| void | applyAImpulse (const Impulse &impulse) const |
| void | applyDCImpulse (const btVector3 &impulse) const |
Public Attributes | |
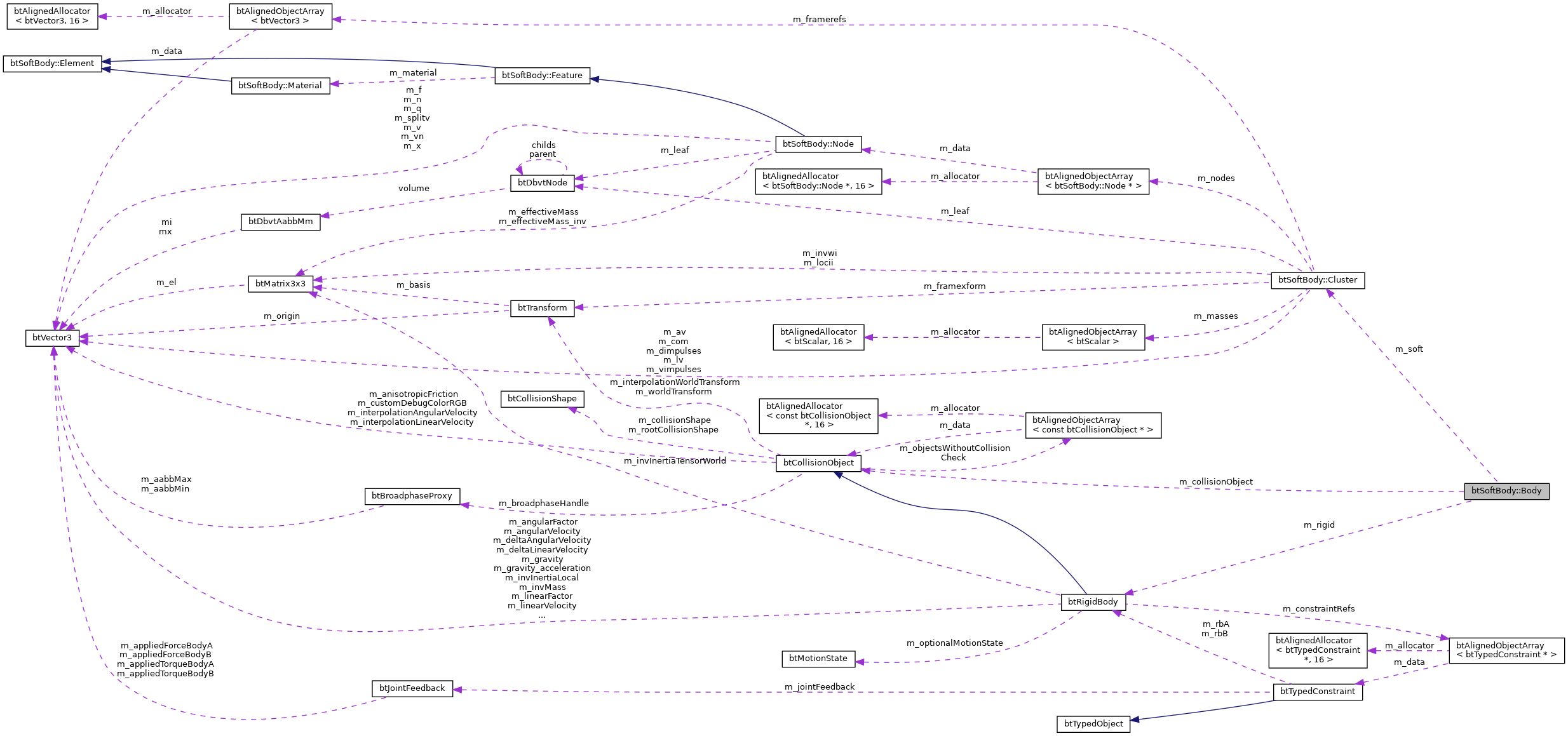
| Cluster * | m_soft |
| btRigidBody * | m_rigid |
| const btCollisionObject * | m_collisionObject |
Detailed Description
Definition at line 513 of file btSoftBody.h.
Constructor & Destructor Documentation
◆ Body() [1/3]
|
inline |
Definition at line 519 of file btSoftBody.h.
◆ Body() [2/3]
|
inline |
Definition at line 520 of file btSoftBody.h.
◆ Body() [3/3]
|
inline |
Definition at line 521 of file btSoftBody.h.
Member Function Documentation
◆ activate()
|
inline |
Definition at line 526 of file btSoftBody.h.
◆ angularVelocity() [1/2]
|
inline |
Definition at line 565 of file btSoftBody.h.
◆ angularVelocity() [2/2]
Definition at line 559 of file btSoftBody.h.
◆ applyAImpulse()
Definition at line 608 of file btSoftBody.h.
◆ applyDAImpulse()
Definition at line 603 of file btSoftBody.h.
◆ applyDCImpulse()
Definition at line 613 of file btSoftBody.h.
◆ applyDImpulse()
|
inline |
Definition at line 580 of file btSoftBody.h.
◆ applyImpulse()
|
inline |
Definition at line 585 of file btSoftBody.h.
◆ applyVAImpulse()
Definition at line 598 of file btSoftBody.h.
◆ applyVImpulse()
|
inline |
Definition at line 575 of file btSoftBody.h.
◆ invMass()
|
inline |
Definition at line 540 of file btSoftBody.h.
◆ invWorldInertia()
|
inline |
Definition at line 533 of file btSoftBody.h.
◆ linearVelocity()
|
inline |
Definition at line 553 of file btSoftBody.h.
◆ velocity()
Definition at line 571 of file btSoftBody.h.
◆ xform()
|
inline |
Definition at line 546 of file btSoftBody.h.
Member Data Documentation
◆ m_collisionObject
| const btCollisionObject* btSoftBody::Body::m_collisionObject |
Definition at line 517 of file btSoftBody.h.
◆ m_rigid
| btRigidBody* btSoftBody::Body::m_rigid |
Definition at line 516 of file btSoftBody.h.
◆ m_soft
| Cluster* btSoftBody::Body::m_soft |
Definition at line 515 of file btSoftBody.h.
The documentation for this struct was generated from the following file: