#include "gim_linear_math.h"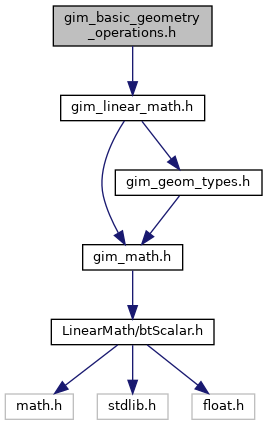

Go to the source code of this file.
Macros | |
| #define | PLANEDIREPSILON 0.0000001f |
| #define | PARALELENORMALS 0.000001f |
| #define | TRIANGLE_NORMAL(v1, v2, v3, n) |
| #define | TRIANGLE_NORMAL_FAST(v1, v2, v3, n) |
| #define | TRIANGLE_PLANE(v1, v2, v3, plane) |
| plane is a vec4f | |
| #define | TRIANGLE_PLANE_FAST(v1, v2, v3, plane) |
| plane is a vec4f | |
| #define | EDGE_PLANE(e1, e2, n, plane) |
| Calc a plane from an edge an a normal. plane is a vec4f. | |
| #define | DISTANCE_PLANE_POINT(plane, point) (VEC_DOT(plane, point) - plane[3]) |
| #define | PROJECT_POINT_PLANE(point, plane, projected) |
| #define | PLANE_MINOR_AXES(plane, i0, i1) VEC_MINOR_AXES(plane, i0, i1) |
| Finds the 2 smallest cartesian coordinates of a plane normal. | |
Enumerations | |
| enum | ePLANE_INTERSECTION_TYPE { G_BACK_PLANE = 0 , G_COLLIDE_PLANE , G_FRONT_PLANE } |
| enum | eLINE_PLANE_INTERSECTION_TYPE { G_FRONT_PLANE_S1 = 0 , G_FRONT_PLANE_S2 , G_BACK_PLANE_S1 , G_BACK_PLANE_S2 , G_COLLIDE_PLANE_S1 , G_COLLIDE_PLANE_S2 } |
Detailed Description
Definition in file gim_basic_geometry_operations.h.
Macro Definition Documentation
◆ DISTANCE_PLANE_POINT
Definition at line 89 of file gim_basic_geometry_operations.h.
◆ EDGE_PLANE
Calc a plane from an edge an a normal. plane is a vec4f.
Definition at line 80 of file gim_basic_geometry_operations.h.
◆ PARALELENORMALS
| #define PARALELENORMALS 0.000001f |
Definition at line 45 of file gim_basic_geometry_operations.h.
◆ PLANE_MINOR_AXES
Finds the 2 smallest cartesian coordinates of a plane normal.
Definition at line 235 of file gim_basic_geometry_operations.h.
◆ PLANEDIREPSILON
| #define PLANEDIREPSILON 0.0000001f |
Definition at line 41 of file gim_basic_geometry_operations.h.
◆ PROJECT_POINT_PLANE
Definition at line 91 of file gim_basic_geometry_operations.h.
◆ TRIANGLE_NORMAL
◆ TRIANGLE_NORMAL_FAST
◆ TRIANGLE_PLANE
plane is a vec4f
Definition at line 66 of file gim_basic_geometry_operations.h.
◆ TRIANGLE_PLANE_FAST
plane is a vec4f
Definition at line 73 of file gim_basic_geometry_operations.h.
Enumeration Type Documentation
◆ eLINE_PLANE_INTERSECTION_TYPE
| Enumerator | |
|---|---|
| G_FRONT_PLANE_S1 | |
| G_FRONT_PLANE_S2 | |
| G_BACK_PLANE_S1 | |
| G_BACK_PLANE_S2 | |
| G_COLLIDE_PLANE_S1 | |
| G_COLLIDE_PLANE_S2 | |
Definition at line 133 of file gim_basic_geometry_operations.h.
◆ ePLANE_INTERSECTION_TYPE
| Enumerator | |
|---|---|
| G_BACK_PLANE | |
| G_COLLIDE_PLANE | |
| G_FRONT_PLANE | |
Definition at line 126 of file gim_basic_geometry_operations.h.
Function Documentation
◆ BOX_AXIS_INTERSECT()
Line box intersection in one dimension.
- Parameters
-
pos Position of the ray dir Projection of the Direction of the ray bmin Minimum bound of the box bmax Maximum bound of the box tfirst the minimum projection. Assign to 0 at first. tlast the maximum projection. Assign to INFINITY at first.
- Returns
- true if there is an intersection.
Definition at line 496 of file gim_basic_geometry_operations.h.
◆ CLOSEST_POINT_ON_SEGMENT()
|
inline |
Finds the closest point(cp) to (v) on a segment (e1,e2)
Definition at line 341 of file gim_basic_geometry_operations.h.
◆ INTERSECT_PLANES()
|
inline |
Returns the Ray on which 2 planes intersect if they do. Written by Rodrigo Hernandez on ODE convex collision.
- Parameters
-
p1 Plane 1 p2 Plane 2 p Contains the origin of the ray upon returning if planes intersect d Contains the direction of the ray upon returning if planes intersect
- Returns
- true if the planes intersect, 0 if paralell.
Definition at line 316 of file gim_basic_geometry_operations.h.
◆ LINE_INTERSECTION_PARAMS()
|
inline |
Finds the line params where these lines intersect.
- Parameters
-
dir1 Direction of line 1 point1 Point of line 1 dir2 Direction of line 2 point2 Point of line 2 t1 Result Parameter for line 1 t2 Result Parameter for line 2 dointersect 0 if the lines won't intersect, else 1
Definition at line 377 of file gim_basic_geometry_operations.h.
◆ LINE_PLANE_COLLISION()
|
inline |
line collision
- Returns
- -0 if the ray never intersects -1 if the ray collides in front -2 if the ray collides in back
Definition at line 270 of file gim_basic_geometry_operations.h.
◆ PLANE_CLIP_SEGMENT()
|
inline |
Definition at line 114 of file gim_basic_geometry_operations.h.
◆ PLANE_CLIP_SEGMENT2()
|
inline |
Confirms if the plane intersect the edge or nor.
intersection type must have the following values
- 0 : Segment in front of plane, s1 closest
- 1 : Segment in front of plane, s2 closest
- 2 : Segment in back of plane, s1 closest
- 3 : Segment in back of plane, s2 closest
- 4 : Segment collides plane, s1 in back
- 5 : Segment collides plane, s2 in back
Definition at line 157 of file gim_basic_geometry_operations.h.
◆ PLANE_CLIP_SEGMENT_CLOSEST()
|
inline |
Confirms if the plane intersect the edge or not.
clipped1 and clipped2 are the vertices behind the plane. clipped1 is the closest
intersection_type must have the following values
- 0 : Segment in front of plane, s1 closest
- 1 : Segment in front of plane, s2 closest
- 2 : Segment in back of plane, s1 closest
- 3 : Segment in back of plane, s2 closest
- 4 : Segment collides plane, s1 in back
- 5 : Segment collides plane, s2 in back
Definition at line 199 of file gim_basic_geometry_operations.h.
◆ POINT_IN_HULL()
|
inline |
Verifies if a point is in the plane hull.
Definition at line 101 of file gim_basic_geometry_operations.h.
◆ RAY_PLANE_COLLISION()
|
inline |
Ray plane collision in one way.
Intersects plane in one way only. The ray must face the plane (normals must be in opossite directions).
It uses the PLANEDIREPSILON constant.
Definition at line 243 of file gim_basic_geometry_operations.h.
◆ SEGMENT_COLLISION()
|
inline |
Find closest points on segments.
Definition at line 401 of file gim_basic_geometry_operations.h.