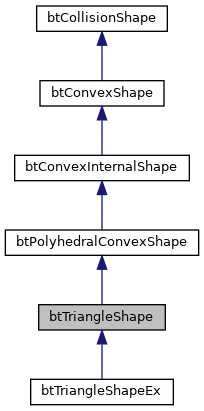
#include <btTriangleShape.h>
Public Attributes | |
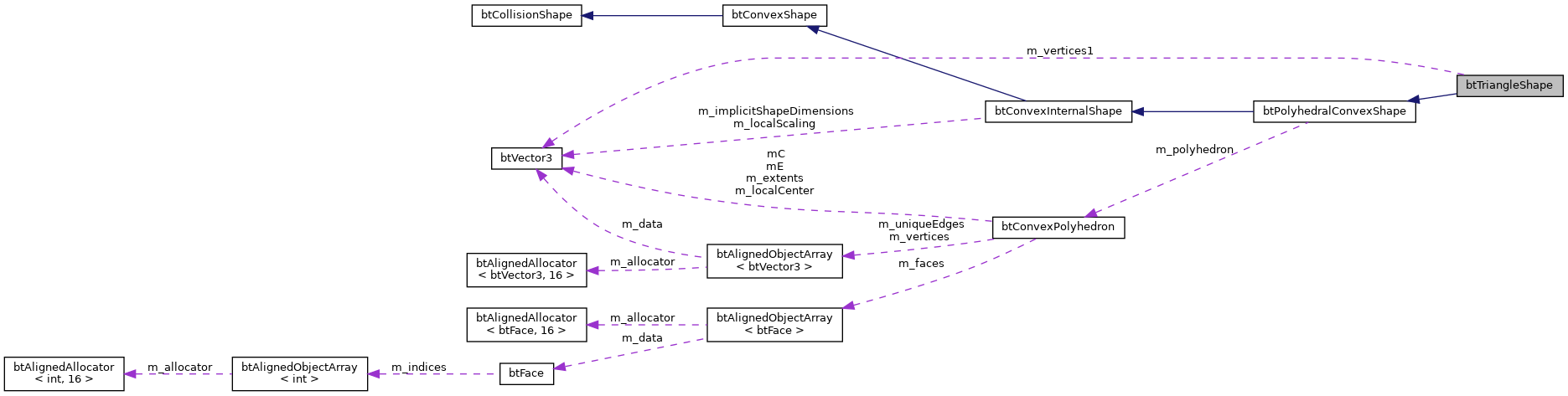
| btVector3 | m_vertices1 [3] |
Additional Inherited Members | |
 Protected Member Functions inherited from btConvexInternalShape Protected Member Functions inherited from btConvexInternalShape | |
| btConvexInternalShape () | |
| Protected Attributes inherited from btPolyhedralConvexShape | |
| btConvexPolyhedron * | m_polyhedron |
| Protected Attributes inherited from btConvexInternalShape | |
| btVector3 | m_localScaling |
| btVector3 | m_implicitShapeDimensions |
| btScalar | m_collisionMargin |
| btScalar | m_padding |
| Protected Attributes inherited from btCollisionShape | |
| int | m_shapeType |
| void * | m_userPointer |
| int | m_userIndex |
| int | m_userIndex2 |
Detailed Description
Definition at line 22 of file btTriangleShape.h.
Constructor & Destructor Documentation
◆ btTriangleShape() [1/2]
|
inline |
Definition at line 82 of file btTriangleShape.h.
◆ btTriangleShape() [2/2]
|
inline |
Definition at line 87 of file btTriangleShape.h.
Member Function Documentation
◆ batchedUnitVectorGetSupportingVertexWithoutMargin()
|
inlinevirtual |
Reimplemented from btPolyhedralConvexShape.
Definition at line 72 of file btTriangleShape.h.
◆ BT_DECLARE_ALIGNED_ALLOCATOR()
| btTriangleShape::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
◆ calcNormal()
Definition at line 105 of file btTriangleShape.h.
◆ calculateLocalInertia()
|
inlinevirtual |
Reimplemented from btPolyhedralConvexShape.
Definition at line 118 of file btTriangleShape.h.
◆ getAabb()
|
inlinevirtual |
getAabb's default implementation is brute force, expected derived classes to implement a fast dedicated version
Reimplemented from btConvexInternalShape.
Reimplemented in btTriangleShapeEx.
Definition at line 60 of file btTriangleShape.h.
◆ getEdge()
Implements btPolyhedralConvexShape.
Definition at line 54 of file btTriangleShape.h.
◆ getName()
Implements btCollisionShape.
Definition at line 157 of file btTriangleShape.h.
◆ getNumEdges()
Implements btPolyhedralConvexShape.
Definition at line 49 of file btTriangleShape.h.
◆ getNumPlanes()
Implements btPolyhedralConvexShape.
Definition at line 100 of file btTriangleShape.h.
◆ getNumPreferredPenetrationDirections()
Reimplemented from btConvexInternalShape.
Definition at line 162 of file btTriangleShape.h.
◆ getNumVertices()
Implements btPolyhedralConvexShape.
Definition at line 30 of file btTriangleShape.h.
◆ getPlane()
|
inlinevirtual |
Implements btPolyhedralConvexShape.
Definition at line 95 of file btTriangleShape.h.
◆ getPlaneEquation()
|
inlinevirtual |
Definition at line 111 of file btTriangleShape.h.
◆ getPreferredPenetrationDirection()
|
inlinevirtual |
Reimplemented from btConvexInternalShape.
Definition at line 167 of file btTriangleShape.h.
◆ getVertex()
Implements btPolyhedralConvexShape.
Definition at line 44 of file btTriangleShape.h.
◆ getVertexPtr() [1/2]
Definition at line 35 of file btTriangleShape.h.
◆ getVertexPtr() [2/2]
Definition at line 40 of file btTriangleShape.h.
◆ isInside()
|
inlinevirtual |
Implements btPolyhedralConvexShape.
Definition at line 125 of file btTriangleShape.h.
◆ localGetSupportingVertexWithoutMargin()
|
inlinevirtual |
Reimplemented from btPolyhedralConvexShape.
Definition at line 66 of file btTriangleShape.h.
Member Data Documentation
◆ m_vertices1
| btVector3 btTriangleShape::m_vertices1[3] |
Definition at line 28 of file btTriangleShape.h.
The documentation for this class was generated from the following file: