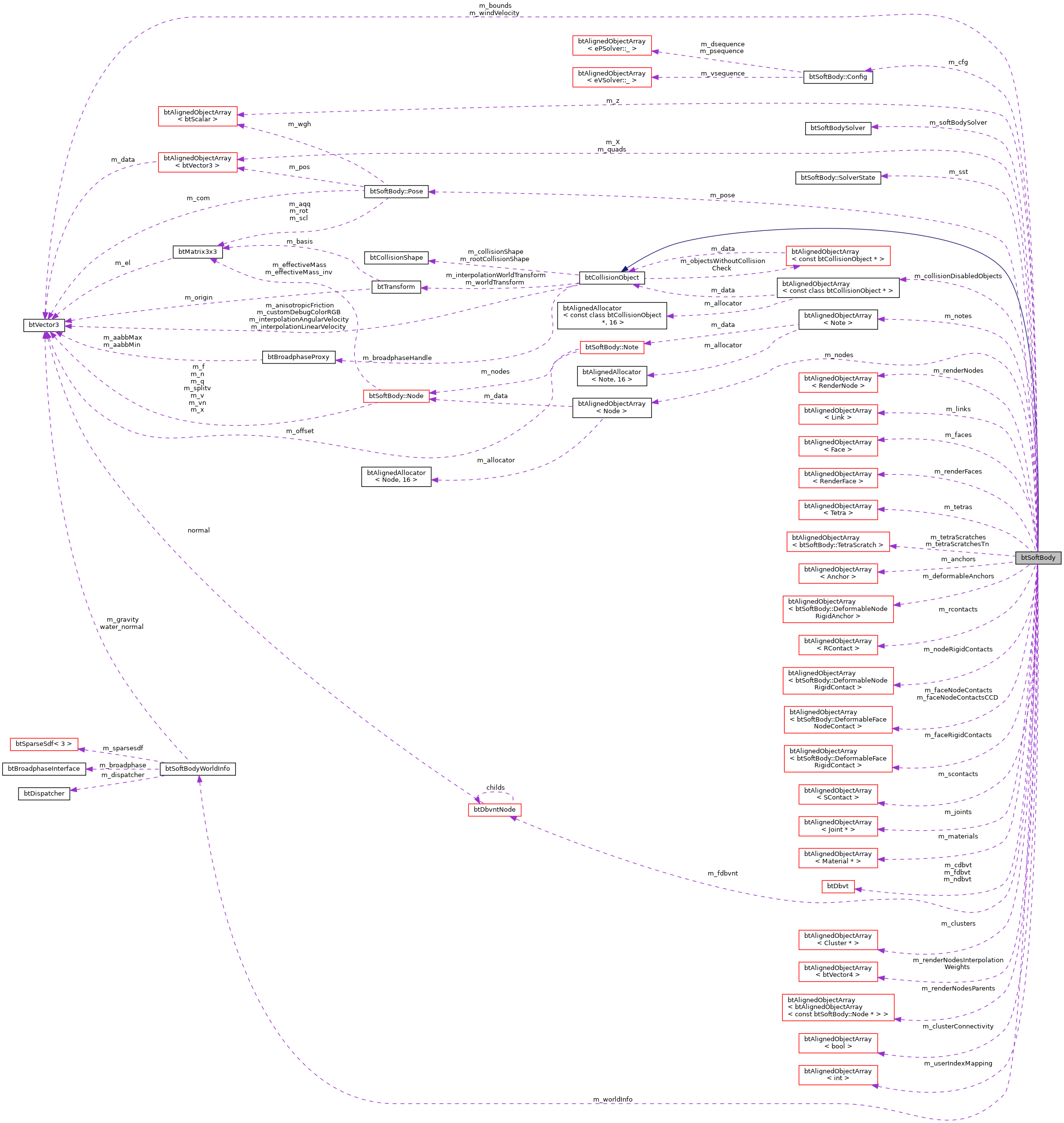
The btSoftBody is an class to simulate cloth and volumetric soft bodies. More...
#include <btSoftBody.h>
Classes | |
| struct | AJoint |
| struct | Anchor |
| struct | Body |
| struct | CJoint |
| struct | Cluster |
| struct | Config |
| struct | DeformableFaceNodeContact |
| class | DeformableFaceRigidContact |
| class | DeformableNodeRigidAnchor |
| class | DeformableNodeRigidContact |
| class | DeformableRigidContact |
| struct | eAeroModel |
| eAeroModel More... | |
| struct | eFeature |
| eFeature More... | |
| struct | Element |
| struct | ePSolver |
| ePSolver : positions solvers More... | |
| struct | eSolverPresets |
| eSolverPresets More... | |
| struct | eVSolver |
| eVSolver : velocities solvers More... | |
| struct | Face |
| struct | fCollision |
| fCollision More... | |
| struct | Feature |
| struct | fMaterial |
| fMaterial More... | |
| struct | ImplicitFn |
| struct | Impulse |
| struct | Joint |
| struct | Link |
| struct | LJoint |
| struct | Material |
| struct | Node |
| struct | Note |
| struct | Pose |
| struct | RayFromToCaster |
| RayFromToCaster takes a ray from, ray to (instead of direction!) More... | |
| struct | RContact |
| struct | RenderFace |
| struct | RenderNode |
| struct | SContact |
| struct | sCti |
| struct | sMedium |
| struct | SolverState |
| struct | sRayCast |
| struct | Tetra |
| struct | TetraScratch |
Additional Inherited Members | |
 Protected Attributes inherited from btCollisionObject Protected Attributes inherited from btCollisionObject | |
| btTransform | m_worldTransform |
| btTransform | m_interpolationWorldTransform |
| m_interpolationWorldTransform is used for CCD and interpolation it can be either previous or future (predicted) transform | |
| btVector3 | m_interpolationLinearVelocity |
| btVector3 | m_interpolationAngularVelocity |
| btVector3 | m_anisotropicFriction |
| int | m_hasAnisotropicFriction |
| btScalar | m_contactProcessingThreshold |
| btBroadphaseProxy * | m_broadphaseHandle |
| btCollisionShape * | m_collisionShape |
| void * | m_extensionPointer |
| m_extensionPointer is used by some internal low-level Bullet extensions. | |
| btCollisionShape * | m_rootCollisionShape |
| m_rootCollisionShape is temporarily used to store the original collision shape The m_collisionShape might be temporarily replaced by a child collision shape during collision detection purposes If it is NULL, the m_collisionShape is not temporarily replaced. | |
| int | m_collisionFlags |
| int | m_islandTag1 |
| int | m_companionId |
| int | m_worldArrayIndex |
| int | m_activationState1 |
| btScalar | m_deactivationTime |
| btScalar | m_friction |
| btScalar | m_restitution |
| btScalar | m_rollingFriction |
| btScalar | m_spinningFriction |
| btScalar | m_contactDamping |
| btScalar | m_contactStiffness |
| int | m_internalType |
| m_internalType is reserved to distinguish Bullet's btCollisionObject, btRigidBody, btSoftBody, btGhostObject etc. | |
| void * | m_userObjectPointer |
| users can point to their objects, m_userPointer is not used by Bullet, see setUserPointer/getUserPointer | |
| int | m_userIndex2 |
| int | m_userIndex |
| int | m_userIndex3 |
| btScalar | m_hitFraction |
| time of impact calculation | |
| btScalar | m_ccdSweptSphereRadius |
| Swept sphere radius (0.0 by default), see btConvexConvexAlgorithm:: | |
| btScalar | m_ccdMotionThreshold |
| Don't do continuous collision detection if the motion (in one step) is less then m_ccdMotionThreshold. | |
| int | m_checkCollideWith |
| If some object should have elaborate collision filtering by sub-classes. | |
| btAlignedObjectArray< const btCollisionObject * > | m_objectsWithoutCollisionCheck |
| int | m_updateRevision |
| internal update revision number. It will be increased when the object changes. This allows some subsystems to perform lazy evaluation. | |
| btVector3 | m_customDebugColorRGB |
Detailed Description
The btSoftBody is an class to simulate cloth and volumetric soft bodies.
There is two-way interaction between btSoftBody and btRigidBody/btCollisionObject.
Definition at line 74 of file btSoftBody.h.
Member Typedef Documentation
◆ psolver_t
| typedef void(* btSoftBody::psolver_t) (btSoftBody *, btScalar, btScalar) |
Definition at line 785 of file btSoftBody.h.
◆ tAnchorArray
Definition at line 796 of file btSoftBody.h.
◆ tClusterArray
Definition at line 787 of file btSoftBody.h.
◆ tDenseMatrix
Definition at line 802 of file btSoftBody.h.
◆ tFaceArray
Definition at line 793 of file btSoftBody.h.
◆ tJointArray
Definition at line 800 of file btSoftBody.h.
◆ tLeafArray
Definition at line 791 of file btSoftBody.h.
◆ tLinkArray
Definition at line 792 of file btSoftBody.h.
◆ tMaterialArray
Definition at line 799 of file btSoftBody.h.
◆ tNodeArray
Definition at line 789 of file btSoftBody.h.
◆ tNoteArray
Definition at line 788 of file btSoftBody.h.
◆ tPSolverArray
Definition at line 152 of file btSoftBody.h.
◆ tRContactArray
Definition at line 797 of file btSoftBody.h.
◆ tRenderFaceArray
Definition at line 794 of file btSoftBody.h.
◆ tRenderNodeArray
Definition at line 790 of file btSoftBody.h.
◆ tScalarArray
Definition at line 220 of file btSoftBody.h.
◆ tSContactArray
Definition at line 798 of file btSoftBody.h.
◆ tSoftBodyArray
Definition at line 801 of file btSoftBody.h.
◆ tTetraArray
Definition at line 795 of file btSoftBody.h.
◆ tVector3Array
Definition at line 221 of file btSoftBody.h.
◆ tVSolverArray
Definition at line 151 of file btSoftBody.h.
◆ vsolver_t
| typedef void(* btSoftBody::vsolver_t) (btSoftBody *, btScalar) |
Definition at line 786 of file btSoftBody.h.
Constructor & Destructor Documentation
◆ btSoftBody() [1/2]
| btSoftBody::btSoftBody | ( | btSoftBodyWorldInfo * | worldInfo, |
| int | node_count, | ||
| const btVector3 * | x, | ||
| const btScalar * | m | ||
| ) |
Definition at line 130 of file btSoftBody.cpp.
◆ btSoftBody() [2/2]
| btSoftBody::btSoftBody | ( | btSoftBodyWorldInfo * | worldInfo | ) |
Definition at line 164 of file btSoftBody.cpp.
◆ ~btSoftBody()
|
virtual |
Definition at line 240 of file btSoftBody.cpp.
Member Function Documentation
◆ addAeroForceToFace()
Definition at line 797 of file btSoftBody.cpp.
◆ addAeroForceToNode()
Definition at line 708 of file btSoftBody.cpp.
◆ addForce() [1/2]
Definition at line 693 of file btSoftBody.cpp.
◆ addForce() [2/2]
Definition at line 699 of file btSoftBody.cpp.
◆ addVelocity() [1/2]
Definition at line 893 of file btSoftBody.cpp.
◆ addVelocity() [2/2]
Definition at line 913 of file btSoftBody.cpp.
◆ advanceDeformation()
| void btSoftBody::advanceDeformation | ( | ) |
Definition at line 3562 of file btSoftBody.cpp.
◆ appendAnchor() [1/2]
| void btSoftBody::appendAnchor | ( | int | node, |
| btRigidBody * | body, | ||
| bool | disableCollisionBetweenLinkedBodies = false, |
||
| btScalar | influence = 1 |
||
| ) |
Definition at line 504 of file btSoftBody.cpp.
◆ appendAnchor() [2/2]
| void btSoftBody::appendAnchor | ( | int | node, |
| btRigidBody * | body, | ||
| const btVector3 & | localPivot, | ||
| bool | disableCollisionBetweenLinkedBodies = false, |
||
| btScalar | influence = 1 |
||
| ) |
Definition at line 511 of file btSoftBody.cpp.
◆ appendAngularJoint() [1/3]
| void btSoftBody::appendAngularJoint | ( | const AJoint::Specs & | specs, |
| Body | body = Body() |
||
| ) |
Definition at line 681 of file btSoftBody.cpp.
◆ appendAngularJoint() [2/3]
| void btSoftBody::appendAngularJoint | ( | const AJoint::Specs & | specs, |
| btSoftBody * | body | ||
| ) |
Definition at line 687 of file btSoftBody.cpp.
◆ appendAngularJoint() [3/3]
| void btSoftBody::appendAngularJoint | ( | const AJoint::Specs & | specs, |
| Cluster * | body0, | ||
| Body | body1 | ||
| ) |
Definition at line 666 of file btSoftBody.cpp.
◆ appendDeformableAnchor() [1/2]
| void btSoftBody::appendDeformableAnchor | ( | int | node, |
| btMultiBodyLinkCollider * | link | ||
| ) |
Definition at line 584 of file btSoftBody.cpp.
◆ appendDeformableAnchor() [2/2]
| void btSoftBody::appendDeformableAnchor | ( | int | node, |
| btRigidBody * | body | ||
| ) |
Definition at line 531 of file btSoftBody.cpp.
◆ appendFace() [1/2]
Definition at line 432 of file btSoftBody.cpp.
◆ appendFace() [2/2]
Definition at line 448 of file btSoftBody.cpp.
◆ appendLinearJoint() [1/3]
| void btSoftBody::appendLinearJoint | ( | const LJoint::Specs & | specs, |
| Body | body = Body() |
||
| ) |
Definition at line 654 of file btSoftBody.cpp.
◆ appendLinearJoint() [2/3]
| void btSoftBody::appendLinearJoint | ( | const LJoint::Specs & | specs, |
| btSoftBody * | body | ||
| ) |
Definition at line 660 of file btSoftBody.cpp.
◆ appendLinearJoint() [3/3]
| void btSoftBody::appendLinearJoint | ( | const LJoint::Specs & | specs, |
| Cluster * | body0, | ||
| Body | body1 | ||
| ) |
Definition at line 640 of file btSoftBody.cpp.
◆ appendLink() [1/3]
Definition at line 392 of file btSoftBody.cpp.
◆ appendLink() [2/3]
Definition at line 406 of file btSoftBody.cpp.
◆ appendLink() [3/3]
| void btSoftBody::appendLink | ( | Node * | node0, |
| Node * | node1, | ||
| Material * | mat = 0, |
||
| bool | bcheckexist = false |
||
| ) |
Definition at line 415 of file btSoftBody.cpp.
◆ appendMaterial()
| btSoftBody::Material * btSoftBody::appendMaterial | ( | ) |
Definition at line 302 of file btSoftBody.cpp.
◆ appendNode()
Definition at line 372 of file btSoftBody.cpp.
◆ appendNote() [1/4]
| void btSoftBody::appendNote | ( | const char * | text, |
| const btVector3 & | o, | ||
| const btVector4 & | c = btVector4(1, 0, 0, 0), |
||
| Node * | n0 = 0, |
||
| Node * | n1 = 0, |
||
| Node * | n2 = 0, |
||
| Node * | n3 = 0 |
||
| ) |
Definition at line 314 of file btSoftBody.cpp.
◆ appendNote() [2/4]
Definition at line 361 of file btSoftBody.cpp.
◆ appendNote() [3/4]
Definition at line 351 of file btSoftBody.cpp.
◆ appendNote() [4/4]
Definition at line 343 of file btSoftBody.cpp.
◆ appendTetra() [1/2]
Definition at line 472 of file btSoftBody.cpp.
◆ appendTetra() [2/2]
Definition at line 486 of file btSoftBody.cpp.
◆ applyClusters()
Definition at line 3377 of file btSoftBody.cpp.
◆ applyForces()
| void btSoftBody::applyForces | ( | ) |
Definition at line 3741 of file btSoftBody.cpp.
◆ applyRepulsionForce()
Definition at line 1317 of file btSoftBody.h.
◆ BaryEval()
|
inlinestatic |
Definition at line 1309 of file btSoftBody.h.
◆ calculateSerializeBufferSize()
|
virtual |
Reimplemented from btCollisionObject.
Definition at line 4320 of file btSoftBody.cpp.
◆ checkContact()
| bool btSoftBody::checkContact | ( | const btCollisionObjectWrapper * | colObjWrap, |
| const btVector3 & | x, | ||
| btScalar | margin, | ||
| btSoftBody::sCti & | cti | ||
| ) | const |
Definition at line 2748 of file btSoftBody.cpp.
◆ checkDeformableContact()
| bool btSoftBody::checkDeformableContact | ( | const btCollisionObjectWrapper * | colObjWrap, |
| const btVector3 & | x, | ||
| btScalar | margin, | ||
| btSoftBody::sCti & | cti, | ||
| bool | predict = false |
||
| ) | const |
Definition at line 2777 of file btSoftBody.cpp.
◆ checkDeformableFaceContact()
| bool btSoftBody::checkDeformableFaceContact | ( | const btCollisionObjectWrapper * | colObjWrap, |
| Face & | f, | ||
| btVector3 & | contact_point, | ||
| btVector3 & | bary, | ||
| btScalar | margin, | ||
| btSoftBody::sCti & | cti, | ||
| bool | predict = false |
||
| ) | const |
Definition at line 2825 of file btSoftBody.cpp.
◆ checkFace()
Definition at line 278 of file btSoftBody.cpp.
◆ checkLink() [1/2]
Definition at line 262 of file btSoftBody.cpp.
◆ checkLink() [2/2]
Definition at line 256 of file btSoftBody.cpp.
◆ cleanupClusters()
| void btSoftBody::cleanupClusters | ( | ) |
Definition at line 3345 of file btSoftBody.cpp.
◆ clusterAImpulse()
Definition at line 1338 of file btSoftBody.cpp.
◆ clusterCom() [1/2]
Definition at line 1269 of file btSoftBody.cpp.
◆ clusterCom() [2/2]
Definition at line 1280 of file btSoftBody.cpp.
◆ clusterCount()
| int btSoftBody::clusterCount | ( | ) | const |
Definition at line 1263 of file btSoftBody.cpp.
◆ clusterDAImpulse()
Definition at line 1330 of file btSoftBody.cpp.
◆ clusterDCImpulse()
Definition at line 1345 of file btSoftBody.cpp.
◆ clusterDImpulse()
|
static |
Definition at line 1304 of file btSoftBody.cpp.
◆ clusterImpulse()
|
static |
Definition at line 1314 of file btSoftBody.cpp.
◆ clusterVAImpulse()
Definition at line 1321 of file btSoftBody.cpp.
◆ clusterVelocity()
Definition at line 1286 of file btSoftBody.cpp.
◆ clusterVImpulse()
|
static |
Definition at line 1292 of file btSoftBody.cpp.
◆ cutLink() [1/2]
Definition at line 1978 of file btSoftBody.cpp.
◆ cutLink() [2/2]
Definition at line 1984 of file btSoftBody.cpp.
◆ dampClusters()
| void btSoftBody::dampClusters | ( | ) |
Definition at line 3428 of file btSoftBody.cpp.
◆ defaultCollisionHandler() [1/2]
| void btSoftBody::defaultCollisionHandler | ( | btSoftBody * | psb | ) |
Definition at line 4158 of file btSoftBody.cpp.
◆ defaultCollisionHandler() [2/2]
| void btSoftBody::defaultCollisionHandler | ( | const btCollisionObjectWrapper * | pcoWrap | ) |
Definition at line 4076 of file btSoftBody.cpp.
◆ evaluateCom()
| btVector3 btSoftBody::evaluateCom | ( | ) | const |
Definition at line 2735 of file btSoftBody.cpp.
◆ generateBendingConstraints()
generic Floyd's algorithm
Definition at line 1357 of file btSoftBody.cpp.
◆ generateClusters()
generateClusters with k=0 will create a convex cluster for each tetrahedron or triangle otherwise an approximation will be used (better performance)
Definition at line 1521 of file btSoftBody.cpp.
◆ geometricCollisionHandler()
| void btSoftBody::geometricCollisionHandler | ( | btSoftBody * | psb | ) |
Definition at line 4258 of file btSoftBody.cpp.
◆ getAabb()
Definition at line 1174 of file btSoftBody.h.
◆ getCenterOfMass()
|
inline |
Definition at line 1030 of file btSoftBody.h.
◆ getImpulseFactor()
|
inlinevirtual |
Reimplemented in btReducedDeformableBody.
Definition at line 1107 of file btSoftBody.h.
◆ getLinearVelocity()
| btVector3 btSoftBody::getLinearVelocity | ( | ) |
Definition at line 1034 of file btSoftBody.cpp.
◆ getMass()
Definition at line 930 of file btSoftBody.cpp.
◆ getRestLengthScale()
| btScalar btSoftBody::getRestLengthScale | ( | ) |
Definition at line 1164 of file btSoftBody.cpp.
◆ getRigidTransform()
| btTransform btSoftBody::getRigidTransform | ( | ) |
Definition at line 1067 of file btSoftBody.cpp.
◆ getSoftBodySolver() [1/2]
|
inline |
Definition at line 1140 of file btSoftBody.h.
◆ getSoftBodySolver() [2/2]
|
inline |
Definition at line 1148 of file btSoftBody.h.
◆ getSolver() [1/2]
|
static |
Definition at line 4032 of file btSoftBody.cpp.
◆ getSolver() [2/2]
|
static |
Definition at line 4052 of file btSoftBody.cpp.
◆ getTotalMass()
| btScalar btSoftBody::getTotalMass | ( | ) | const |
Definition at line 936 of file btSoftBody.cpp.
◆ getVolume()
| btScalar btSoftBody::getVolume | ( | ) | const |
Definition at line 1244 of file btSoftBody.cpp.
◆ getWindVelocity()
Return the wind velocity for interaction with the air.
Definition at line 4315 of file btSoftBody.cpp.
◆ getWorldInfo()
|
inline |
Definition at line 881 of file btSoftBody.h.
◆ indicesToPointers()
Definition at line 2459 of file btSoftBody.cpp.
◆ initDefaults()
| void btSoftBody::initDefaults | ( | ) |
for now, create a collision shape internally
Definition at line 170 of file btSoftBody.cpp.
◆ initializeClusters()
| void btSoftBody::initializeClusters | ( | ) |
Definition at line 3162 of file btSoftBody.cpp.
◆ initializeDmInverse()
| void btSoftBody::initializeDmInverse | ( | ) |
Definition at line 3472 of file btSoftBody.cpp.
◆ initializeFaceTree()
| void btSoftBody::initializeFaceTree | ( | ) |
Definition at line 2642 of file btSoftBody.cpp.
◆ integrateMotion()
| void btSoftBody::integrateMotion | ( | ) |
Definition at line 2348 of file btSoftBody.cpp.
◆ interpolateRenderMesh()
| void btSoftBody::interpolateRenderMesh | ( | ) |
Definition at line 3815 of file btSoftBody.cpp.
◆ pointersToIndices()
| void btSoftBody::pointersToIndices | ( | ) |
Definition at line 2416 of file btSoftBody.cpp.
◆ predictMotion()
Definition at line 2099 of file btSoftBody.cpp.
◆ prepareClusters()
Definition at line 3359 of file btSoftBody.cpp.
◆ PSolve_Anchors()
|
static |
Definition at line 3864 of file btSoftBody.cpp.
◆ PSolve_Links()
|
static |
Definition at line 3995 of file btSoftBody.cpp.
◆ PSolve_RContacts()
|
static |
Definition at line 3885 of file btSoftBody.cpp.
◆ PSolve_SContacts()
|
static |
Definition at line 3960 of file btSoftBody.cpp.
◆ randomizeConstraints()
| void btSoftBody::randomizeConstraints | ( | ) |
Definition at line 1472 of file btSoftBody.cpp.
◆ rayFaceTest() [1/2]
| int btSoftBody::rayFaceTest | ( | const btVector3 & | rayFrom, |
| const btVector3 & | rayTo, | ||
| btScalar & | mint, | ||
| int & | index | ||
| ) | const |
Definition at line 2577 of file btSoftBody.cpp.
◆ rayFaceTest() [2/2]
| bool btSoftBody::rayFaceTest | ( | const btVector3 & | rayFrom, |
| const btVector3 & | rayTo, | ||
| sRayCast & | results | ||
| ) |
Definition at line 2054 of file btSoftBody.cpp.
◆ rayTest() [1/2]
| int btSoftBody::rayTest | ( | const btVector3 & | rayFrom, |
| const btVector3 & | rayTo, | ||
| btScalar & | mint, | ||
| eFeature::_ & | feature, | ||
| int & | index, | ||
| bool | bcountonly | ||
| ) | const |
Definition at line 2502 of file btSoftBody.cpp.
◆ rayTest() [2/2]
Ray casting using rayFrom and rayTo in worldspace, (not direction!)
Definition at line 2039 of file btSoftBody.cpp.
◆ rebuildNodeTree()
| void btSoftBody::rebuildNodeTree | ( | ) |
Definition at line 2697 of file btSoftBody.cpp.
◆ refine()
| void btSoftBody::refine | ( | ImplicitFn * | ifn, |
| btScalar | accurary, | ||
| bool | cut | ||
| ) |
Definition at line 1714 of file btSoftBody.cpp.
◆ releaseCluster()
Definition at line 1505 of file btSoftBody.cpp.
◆ releaseClusters()
| void btSoftBody::releaseClusters | ( | ) |
Definition at line 1515 of file btSoftBody.cpp.
◆ removeAnchor()
Definition at line 566 of file btSoftBody.cpp.
◆ resetLinkRestLengths()
| void btSoftBody::resetLinkRestLengths | ( | ) |
Definition at line 1233 of file btSoftBody.cpp.
◆ rotate()
|
virtual |
Definition at line 1134 of file btSoftBody.cpp.
◆ scale()
Reimplemented in btReducedDeformableBody.
Definition at line 1143 of file btSoftBody.cpp.
◆ serialize()
|
virtual |
fills the dataBuffer and returns the struct name (and 0 on failure)
Reimplemented from btCollisionObject.
Definition at line 4327 of file btSoftBody.cpp.
◆ setAngularVelocity()
Definition at line 1056 of file btSoftBody.cpp.
◆ setCacheBarycenter()
Definition at line 3467 of file btSoftBody.cpp.
◆ setCollisionQuadrature()
Definition at line 3852 of file btSoftBody.cpp.
◆ setCollisionShape()
|
inlinevirtual |
Reimplemented from btCollisionObject.
Definition at line 892 of file btSoftBody.h.
◆ setDampingCoefficient()
Definition at line 886 of file btSoftBody.h.
◆ setGravityFactor()
Definition at line 3462 of file btSoftBody.cpp.
◆ setLinearVelocity()
Definition at line 1047 of file btSoftBody.cpp.
◆ setMass()
Definition at line 923 of file btSoftBody.cpp.
◆ setMaxStress()
Definition at line 3809 of file btSoftBody.cpp.
◆ setPose()
Definition at line 1185 of file btSoftBody.cpp.
◆ setRestLengthScale()
Definition at line 1170 of file btSoftBody.cpp.
◆ setSelfCollision()
Definition at line 4065 of file btSoftBody.cpp.
◆ setSoftBodySolver()
|
inline |
Definition at line 1132 of file btSoftBody.h.
◆ setSolver()
| void btSoftBody::setSolver | ( | eSolverPresets::_ | preset | ) |
Definition at line 2074 of file btSoftBody.cpp.
◆ setSpringStiffness()
Definition at line 3453 of file btSoftBody.cpp.
◆ setTotalDensity()
Definition at line 983 of file btSoftBody.cpp.
◆ setTotalMass()
Definition at line 947 of file btSoftBody.cpp.
◆ setVelocity()
Definition at line 899 of file btSoftBody.cpp.
◆ setVolumeDensity()
Definition at line 1019 of file btSoftBody.cpp.
◆ setVolumeMass()
Definition at line 989 of file btSoftBody.cpp.
◆ setWindVelocity()
Set a wind velocity for interaction with the air.
Definition at line 4310 of file btSoftBody.cpp.
◆ setZeroVelocity()
| void btSoftBody::setZeroVelocity | ( | ) |
Definition at line 4723 of file btSoftBody.cpp.
◆ solveClusters() [1/2]
Definition at line 3368 of file btSoftBody.cpp.
◆ solveClusters() [2/2]
|
static |
Definition at line 2319 of file btSoftBody.cpp.
◆ solveCommonConstraints()
|
static |
placeholder
Definition at line 2313 of file btSoftBody.cpp.
◆ solveConstraints()
| void btSoftBody::solveConstraints | ( | ) |
Definition at line 2208 of file btSoftBody.cpp.
◆ staticSolve()
Definition at line 2301 of file btSoftBody.cpp.
◆ transform()
|
virtual |
Reimplemented in btReducedDeformableBody.
Definition at line 1103 of file btSoftBody.cpp.
◆ transformTo()
|
virtual |
Reimplemented in btReducedDeformableBody.
Definition at line 1093 of file btSoftBody.cpp.
◆ translate()
Definition at line 1125 of file btSoftBody.cpp.
◆ upcast() [1/2]
|
inlinestatic |
Definition at line 1163 of file btSoftBody.h.
◆ upcast() [2/2]
|
inlinestatic |
Definition at line 1157 of file btSoftBody.h.
◆ updateArea()
Definition at line 3077 of file btSoftBody.cpp.
◆ updateBounds()
| void btSoftBody::updateBounds | ( | ) |
Definition at line 2966 of file btSoftBody.cpp.
◆ updateClusters()
| void btSoftBody::updateClusters | ( | ) |
Definition at line 3229 of file btSoftBody.cpp.
◆ updateConstants()
| void btSoftBody::updateConstants | ( | ) |
Definition at line 3154 of file btSoftBody.cpp.
◆ updateDeactivation()
Definition at line 4707 of file btSoftBody.cpp.
◆ updateDeformation()
| void btSoftBody::updateDeformation | ( | ) |
Definition at line 3524 of file btSoftBody.cpp.
◆ updateFace()
Definition at line 1264 of file btSoftBody.h.
◆ updateFaceTree()
Definition at line 1300 of file btSoftBody.h.
◆ updateLinkConstants()
| void btSoftBody::updateLinkConstants | ( | ) |
Definition at line 3141 of file btSoftBody.cpp.
◆ updateNode()
|
inline |
Definition at line 1225 of file btSoftBody.h.
◆ updateNodeTree()
Definition at line 1257 of file btSoftBody.h.
◆ updateNormals()
| void btSoftBody::updateNormals | ( | ) |
Definition at line 2937 of file btSoftBody.cpp.
◆ updatePose()
| void btSoftBody::updatePose | ( | ) |
Definition at line 3040 of file btSoftBody.cpp.
◆ updateState()
| void btSoftBody::updateState | ( | const btAlignedObjectArray< btVector3 > & | qs, |
| const btAlignedObjectArray< btVector3 > & | vs | ||
| ) |
Definition at line 1489 of file btSoftBody.cpp.
◆ useSelfCollision()
| bool btSoftBody::useSelfCollision | ( | ) |
Definition at line 4070 of file btSoftBody.cpp.
◆ VSolve_Links()
|
static |
Definition at line 4018 of file btSoftBody.cpp.
◆ wantsSleeping()
| bool btSoftBody::wantsSleeping | ( | ) |
Definition at line 4731 of file btSoftBody.cpp.
Member Data Documentation
◆ m_anchors
| tAnchorArray btSoftBody::m_anchors |
Definition at line 822 of file btSoftBody.h.
◆ m_bounds
| btVector3 btSoftBody::m_bounds[2] |
Definition at line 833 of file btSoftBody.h.
◆ m_bUpdateRtCst
| bool btSoftBody::m_bUpdateRtCst |
Definition at line 834 of file btSoftBody.h.
◆ m_cacheBarycenter
| bool btSoftBody::m_cacheBarycenter |
Definition at line 846 of file btSoftBody.h.
◆ m_cdbvt
| btDbvt btSoftBody::m_cdbvt |
Definition at line 838 of file btSoftBody.h.
◆ m_cfg
| Config btSoftBody::m_cfg |
Definition at line 808 of file btSoftBody.h.
◆ m_clusterConnectivity
| btAlignedObjectArray<bool> btSoftBody::m_clusterConnectivity |
Definition at line 855 of file btSoftBody.h.
◆ m_clusters
| tClusterArray btSoftBody::m_clusters |
Definition at line 839 of file btSoftBody.h.
◆ m_collisionDisabledObjects
| btAlignedObjectArray<const class btCollisionObject*> btSoftBody::m_collisionDisabledObjects |
Definition at line 77 of file btSoftBody.h.
◆ m_dampingCoefficient
| btScalar btSoftBody::m_dampingCoefficient |
Definition at line 840 of file btSoftBody.h.
◆ m_deformableAnchors
| btAlignedObjectArray<DeformableNodeRigidAnchor> btSoftBody::m_deformableAnchors |
Definition at line 823 of file btSoftBody.h.
◆ m_faceNodeContacts
| btAlignedObjectArray<DeformableFaceNodeContact> btSoftBody::m_faceNodeContacts |
Definition at line 826 of file btSoftBody.h.
◆ m_faceNodeContactsCCD
| btAlignedObjectArray<DeformableFaceNodeContact> btSoftBody::m_faceNodeContactsCCD |
Definition at line 828 of file btSoftBody.h.
◆ m_faceRigidContacts
| btAlignedObjectArray<DeformableFaceRigidContact> btSoftBody::m_faceRigidContacts |
Definition at line 827 of file btSoftBody.h.
◆ m_faces
| tFaceArray btSoftBody::m_faces |
Definition at line 817 of file btSoftBody.h.
◆ m_fdbvnt
| btDbvntNode* btSoftBody::m_fdbvnt |
Definition at line 837 of file btSoftBody.h.
◆ m_fdbvt
| btDbvt btSoftBody::m_fdbvt |
Definition at line 836 of file btSoftBody.h.
◆ m_gravityFactor
| btScalar btSoftBody::m_gravityFactor |
Definition at line 845 of file btSoftBody.h.
◆ m_joints
| tJointArray btSoftBody::m_joints |
Definition at line 830 of file btSoftBody.h.
◆ m_links
| tLinkArray btSoftBody::m_links |
Definition at line 816 of file btSoftBody.h.
◆ m_materials
| tMaterialArray btSoftBody::m_materials |
Definition at line 831 of file btSoftBody.h.
◆ m_maxSpeedSquared
| btScalar btSoftBody::m_maxSpeedSquared |
Definition at line 842 of file btSoftBody.h.
◆ m_ndbvt
| btDbvt btSoftBody::m_ndbvt |
Definition at line 835 of file btSoftBody.h.
◆ m_nodeRigidContacts
| btAlignedObjectArray<DeformableNodeRigidContact> btSoftBody::m_nodeRigidContacts |
Definition at line 825 of file btSoftBody.h.
◆ m_nodes
| tNodeArray btSoftBody::m_nodes |
Definition at line 814 of file btSoftBody.h.
◆ m_notes
| tNoteArray btSoftBody::m_notes |
Definition at line 813 of file btSoftBody.h.
◆ m_pose
| Pose btSoftBody::m_pose |
Definition at line 810 of file btSoftBody.h.
◆ m_quads
| btAlignedObjectArray<btVector3> btSoftBody::m_quads |
Definition at line 843 of file btSoftBody.h.
◆ m_rcontacts
| tRContactArray btSoftBody::m_rcontacts |
Definition at line 824 of file btSoftBody.h.
◆ m_reducedModel
| bool btSoftBody::m_reducedModel |
Definition at line 861 of file btSoftBody.h.
◆ m_renderFaces
| tRenderFaceArray btSoftBody::m_renderFaces |
Definition at line 818 of file btSoftBody.h.
◆ m_renderNodes
| tRenderNodeArray btSoftBody::m_renderNodes |
Definition at line 815 of file btSoftBody.h.
◆ m_renderNodesInterpolationWeights
| btAlignedObjectArray<btVector4> btSoftBody::m_renderNodesInterpolationWeights |
Definition at line 849 of file btSoftBody.h.
◆ m_renderNodesParents
| btAlignedObjectArray<btAlignedObjectArray<const btSoftBody::Node*> > btSoftBody::m_renderNodesParents |
Definition at line 850 of file btSoftBody.h.
◆ m_repulsionStiffness
| btScalar btSoftBody::m_repulsionStiffness |
Definition at line 844 of file btSoftBody.h.
◆ m_restLengthScale
| btScalar btSoftBody::m_restLengthScale |
Definition at line 859 of file btSoftBody.h.
◆ m_scontacts
| tSContactArray btSoftBody::m_scontacts |
Definition at line 829 of file btSoftBody.h.
◆ m_sleepingThreshold
| btScalar btSoftBody::m_sleepingThreshold |
Definition at line 841 of file btSoftBody.h.
◆ m_softBodySolver
| btSoftBodySolver* btSoftBody::m_softBodySolver |
Definition at line 80 of file btSoftBody.h.
◆ m_softSoftCollision
| bool btSoftBody::m_softSoftCollision |
Definition at line 853 of file btSoftBody.h.
◆ m_sst
| SolverState btSoftBody::m_sst |
Definition at line 809 of file btSoftBody.h.
◆ m_tag
| void* btSoftBody::m_tag |
Definition at line 811 of file btSoftBody.h.
◆ m_tetras
| tTetraArray btSoftBody::m_tetras |
Definition at line 819 of file btSoftBody.h.
◆ m_tetraScratches
| btAlignedObjectArray<TetraScratch> btSoftBody::m_tetraScratches |
Definition at line 820 of file btSoftBody.h.
◆ m_tetraScratchesTn
| btAlignedObjectArray<TetraScratch> btSoftBody::m_tetraScratchesTn |
Definition at line 821 of file btSoftBody.h.
◆ m_timeacc
| btScalar btSoftBody::m_timeacc |
Definition at line 832 of file btSoftBody.h.
◆ m_userIndexMapping
| btAlignedObjectArray<int> btSoftBody::m_userIndexMapping |
Definition at line 879 of file btSoftBody.h.
◆ m_useSelfCollision
| bool btSoftBody::m_useSelfCollision |
Definition at line 852 of file btSoftBody.h.
◆ m_windVelocity
| btVector3 btSoftBody::m_windVelocity |
Definition at line 857 of file btSoftBody.h.
◆ m_worldInfo
| btSoftBodyWorldInfo* btSoftBody::m_worldInfo |
Definition at line 812 of file btSoftBody.h.
◆ m_X
| btAlignedObjectArray<btVector3> btSoftBody::m_X |
Definition at line 847 of file btSoftBody.h.
◆ m_z
| btAlignedObjectArray<btScalar> btSoftBody::m_z |
Definition at line 851 of file btSoftBody.h.
The documentation for this class was generated from the following files: