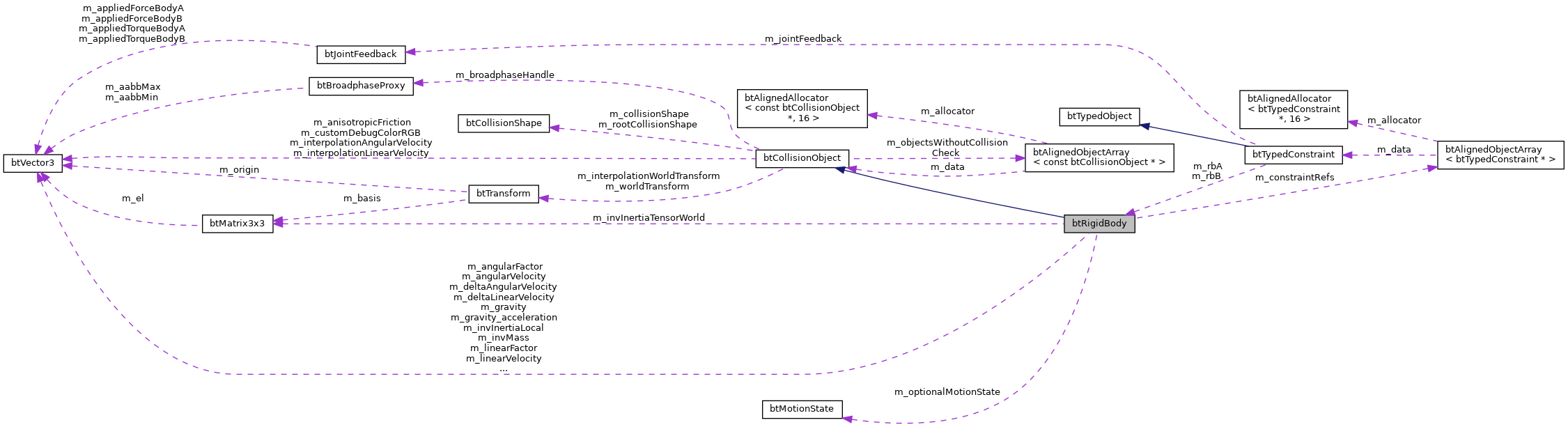
The btRigidBody is the main class for rigid body objects. More...
#include <btRigidBody.h>
Classes | |
| struct | btRigidBodyConstructionInfo |
| The btRigidBodyConstructionInfo structure provides information to create a rigid body. More... | |
Static Public Member Functions | |
| static const btRigidBody * | upcast (const btCollisionObject *colObj) |
| to keep collision detection and dynamics separate we don't store a rigidbody pointer but a rigidbody is derived from btCollisionObject, so we can safely perform an upcast | |
| static btRigidBody * | upcast (btCollisionObject *colObj) |
Public Attributes | |
| int | m_contactSolverType |
| int | m_frictionSolverType |
Protected Member Functions | |
| void | setupRigidBody (const btRigidBodyConstructionInfo &constructionInfo) |
| setupRigidBody is only used internally by the constructor | |
Additional Inherited Members | |
 Public Types inherited from btCollisionObject Public Types inherited from btCollisionObject | |
| enum | CollisionFlags { CF_DYNAMIC_OBJECT = 0 , CF_STATIC_OBJECT = 1 , CF_KINEMATIC_OBJECT = 2 , CF_NO_CONTACT_RESPONSE = 4 , CF_CUSTOM_MATERIAL_CALLBACK = 8 , CF_CHARACTER_OBJECT = 16 , CF_DISABLE_VISUALIZE_OBJECT = 32 , CF_DISABLE_SPU_COLLISION_PROCESSING = 64 , CF_HAS_CONTACT_STIFFNESS_DAMPING = 128 , CF_HAS_CUSTOM_DEBUG_RENDERING_COLOR = 256 , CF_HAS_FRICTION_ANCHOR = 512 , CF_HAS_COLLISION_SOUND_TRIGGER = 1024 } |
| enum | CollisionObjectTypes { CO_COLLISION_OBJECT = 1 , CO_RIGID_BODY = 2 , CO_GHOST_OBJECT = 4 , CO_SOFT_BODY = 8 , CO_HF_FLUID = 16 , CO_USER_TYPE = 32 , CO_FEATHERSTONE_LINK = 64 } |
| enum | AnisotropicFrictionFlags { CF_ANISOTROPIC_FRICTION_DISABLED = 0 , CF_ANISOTROPIC_FRICTION = 1 , CF_ANISOTROPIC_ROLLING_FRICTION = 2 } |
Detailed Description
The btRigidBody is the main class for rigid body objects.
It is derived from btCollisionObject, so it keeps a pointer to a btCollisionShape. It is recommended for performance and memory use to share btCollisionShape objects whenever possible. There are 3 types of rigid bodies:
- A) Dynamic rigid bodies, with positive mass. Motion is controlled by rigid body dynamics.
- B) Fixed objects with zero mass. They are not moving (basically collision objects)
- C) Kinematic objects, which are objects without mass, but the user can move them. There is one-way interaction, and Bullet calculates a velocity based on the timestep and previous and current world transform. Bullet automatically deactivates dynamic rigid bodies, when the velocity is below a threshold for a given time. Deactivated (sleeping) rigid bodies don't take any processing time, except a minor broadphase collision detection impact (to allow active objects to activate/wake up sleeping objects)
Definition at line 59 of file btRigidBody.h.
Constructor & Destructor Documentation
◆ btRigidBody() [1/2]
| btRigidBody::btRigidBody | ( | const btRigidBodyConstructionInfo & | constructionInfo | ) |
btRigidBody constructor using construction info
Definition at line 29 of file btRigidBody.cpp.
◆ btRigidBody() [2/2]
| btRigidBody::btRigidBody | ( | btScalar | mass, |
| btMotionState * | motionState, | ||
| btCollisionShape * | collisionShape, | ||
| const btVector3 & | localInertia = btVector3(0, 0, 0) |
||
| ) |
btRigidBody constructor for backwards compatibility.
To specify friction (etc) during rigid body construction, please use the other constructor (using btRigidBodyConstructionInfo)
Definition at line 34 of file btRigidBody.cpp.
◆ ~btRigidBody()
|
inlinevirtual |
Definition at line 173 of file btRigidBody.h.
Member Function Documentation
◆ addConstraintRef()
| void btRigidBody::addConstraintRef | ( | btTypedConstraint * | c | ) |
disable collision with the 'other' body
Definition at line 415 of file btRigidBody.cpp.
◆ applyCentralForce()
Definition at line 274 of file btRigidBody.h.
◆ applyCentralImpulse()
Definition at line 319 of file btRigidBody.h.
◆ applyCentralPushImpulse()
Definition at line 399 of file btRigidBody.h.
◆ applyDamping()
applyDamping damps the velocity, using the given m_linearDamping and m_angularDamping
Definition at line 149 of file btRigidBody.cpp.
◆ applyForce()
Definition at line 313 of file btRigidBody.h.
◆ applyGravity()
| void btRigidBody::applyGravity | ( | ) |
Definition at line 205 of file btRigidBody.cpp.
◆ applyImpulse()
Definition at line 335 of file btRigidBody.h.
◆ applyPushImpulse()
Definition at line 347 of file btRigidBody.h.
◆ applyTorque()
Definition at line 305 of file btRigidBody.h.
◆ applyTorqueImpulse()
Definition at line 327 of file btRigidBody.h.
◆ applyTorqueTurnImpulse()
Definition at line 407 of file btRigidBody.h.
◆ calculateSerializeBufferSize()
|
virtual |
Reimplemented from btCollisionObject.
Definition at line 458 of file btRigidBody.cpp.
◆ clearForces()
|
inline |
Definition at line 415 of file btRigidBody.h.
◆ clearGravity()
| void btRigidBody::clearGravity | ( | ) |
Definition at line 213 of file btRigidBody.cpp.
◆ computeAngularImpulseDenominator()
Definition at line 493 of file btRigidBody.h.
◆ computeGyroscopicForceExplicit()
explicit version is best avoided, it gains energy
Definition at line 283 of file btRigidBody.cpp.
◆ computeGyroscopicImpulseImplicit_Body()
perform implicit force computation in body space (inertial frame)
Definition at line 297 of file btRigidBody.cpp.
◆ computeGyroscopicImpulseImplicit_World()
perform implicit force computation in world space
Definition at line 336 of file btRigidBody.cpp.
◆ computeImpulseDenominator()
|
inline |
Definition at line 482 of file btRigidBody.h.
◆ getAabb()
Definition at line 123 of file btRigidBody.cpp.
◆ getAngularDamping()
|
inline |
Definition at line 225 of file btRigidBody.h.
◆ getAngularFactor()
Definition at line 579 of file btRigidBody.h.
◆ getAngularSleepingThreshold()
|
inline |
Definition at line 235 of file btRigidBody.h.
◆ getAngularVelocity()
Definition at line 437 of file btRigidBody.h.
◆ getBroadphaseProxy() [1/2]
|
inline |
Definition at line 539 of file btRigidBody.h.
◆ getBroadphaseProxy() [2/2]
|
inline |
Definition at line 535 of file btRigidBody.h.
◆ getCenterOfMassPosition()
Definition at line 423 of file btRigidBody.h.
◆ getCenterOfMassTransform()
|
inline |
Definition at line 429 of file btRigidBody.h.
◆ getCollisionShape() [1/2]
|
inline |
Definition at line 247 of file btRigidBody.h.
◆ getCollisionShape() [2/2]
|
inline |
Definition at line 242 of file btRigidBody.h.
◆ getConstraintRef()
|
inline |
Definition at line 593 of file btRigidBody.h.
◆ getFlags()
|
inline |
Definition at line 608 of file btRigidBody.h.
◆ getGravity()
Definition at line 213 of file btRigidBody.h.
◆ getInvInertiaDiagLocal()
Definition at line 289 of file btRigidBody.h.
◆ getInvInertiaTensorWorld()
|
inline |
Definition at line 265 of file btRigidBody.h.
◆ getInvMass()
|
inline |
Definition at line 263 of file btRigidBody.h.
◆ getLinearDamping()
|
inline |
Definition at line 220 of file btRigidBody.h.
◆ getLinearFactor()
Definition at line 254 of file btRigidBody.h.
◆ getLinearSleepingThreshold()
|
inline |
Definition at line 230 of file btRigidBody.h.
◆ getLinearVelocity()
Definition at line 433 of file btRigidBody.h.
◆ getLocalInertia()
| btVector3 btRigidBody::getLocalInertia | ( | ) | const |
Definition at line 254 of file btRigidBody.cpp.
◆ getMass()
|
inline |
Definition at line 264 of file btRigidBody.h.
◆ getMotionState() [1/2]
|
inline |
Definition at line 549 of file btRigidBody.h.
◆ getMotionState() [2/2]
|
inline |
Definition at line 553 of file btRigidBody.h.
◆ getNumConstraintRefs()
|
inline |
Definition at line 598 of file btRigidBody.h.
◆ getOrientation()
| btQuaternion btRigidBody::getOrientation | ( | ) | const |
Definition at line 392 of file btRigidBody.cpp.
◆ getPushVelocity()
|
inline |
Definition at line 359 of file btRigidBody.h.
◆ getPushVelocityInLocalPoint()
Definition at line 469 of file btRigidBody.h.
◆ getTotalForce()
Definition at line 279 of file btRigidBody.h.
◆ getTotalTorque()
Definition at line 284 of file btRigidBody.h.
◆ getTurnVelocity()
|
inline |
Definition at line 364 of file btRigidBody.h.
◆ getVelocityInLocalPoint()
Definition at line 460 of file btRigidBody.h.
◆ integrateVelocities()
clamp angular velocity. collision calculations will fail on higher angular velocities
Definition at line 372 of file btRigidBody.cpp.
◆ isInWorld()
|
inline |
Definition at line 585 of file btRigidBody.h.
◆ predictIntegratedTransform()
| void btRigidBody::predictIntegratedTransform | ( | btScalar | step, |
| btTransform & | predictedTransform | ||
| ) |
continuous collision detection needs prediction
Definition at line 100 of file btRigidBody.cpp.
◆ proceedToTransform()
| void btRigidBody::proceedToTransform | ( | const btTransform & | newTrans | ) |
Definition at line 221 of file btRigidBody.cpp.
◆ removeConstraintRef()
| void btRigidBody::removeConstraintRef | ( | btTypedConstraint * | c | ) |
Definition at line 438 of file btRigidBody.cpp.
◆ saveKinematicState()
Definition at line 105 of file btRigidBody.cpp.
◆ serialize()
|
virtual |
fills the dataBuffer and returns the struct name (and 0 on failure)
Reimplemented from btCollisionObject.
Definition at line 465 of file btRigidBody.cpp.
◆ serializeSingleObject()
|
virtual |
Reimplemented from btCollisionObject.
Definition at line 500 of file btRigidBody.cpp.
◆ setAngularFactor() [1/2]
Definition at line 574 of file btRigidBody.h.
◆ setAngularFactor() [2/2]
Definition at line 568 of file btRigidBody.h.
◆ setAngularVelocity()
Definition at line 451 of file btRigidBody.h.
◆ setCenterOfMassTransform()
| void btRigidBody::setCenterOfMassTransform | ( | const btTransform & | xform | ) |
Definition at line 399 of file btRigidBody.cpp.
◆ setDamping()
Definition at line 137 of file btRigidBody.cpp.
◆ setFlags()
Definition at line 603 of file btRigidBody.h.
◆ setGravity()
Definition at line 128 of file btRigidBody.cpp.
◆ setInvInertiaDiagLocal()
Definition at line 294 of file btRigidBody.h.
◆ setLinearFactor()
Definition at line 258 of file btRigidBody.h.
◆ setLinearVelocity()
Definition at line 442 of file btRigidBody.h.
◆ setMassProps()
Definition at line 226 of file btRigidBody.cpp.
◆ setMotionState()
|
inline |
Definition at line 557 of file btRigidBody.h.
◆ setNewBroadphaseProxy()
|
inline |
Definition at line 543 of file btRigidBody.h.
◆ setPushVelocity()
Definition at line 369 of file btRigidBody.h.
◆ setSleepingThresholds()
Definition at line 299 of file btRigidBody.h.
◆ setTurnVelocity()
Definition at line 391 of file btRigidBody.h.
◆ setupRigidBody()
|
protected |
setupRigidBody is only used internally by the constructor
Definition at line 40 of file btRigidBody.cpp.
◆ translate()
Definition at line 475 of file btRigidBody.h.
◆ upcast() [1/2]
|
inlinestatic |
Definition at line 195 of file btRigidBody.h.
◆ upcast() [2/2]
|
inlinestatic |
to keep collision detection and dynamics separate we don't store a rigidbody pointer but a rigidbody is derived from btCollisionObject, so we can safely perform an upcast
Definition at line 189 of file btRigidBody.h.
◆ updateDeactivation()
Definition at line 499 of file btRigidBody.h.
◆ updateInertiaTensor()
| void btRigidBody::updateInertiaTensor | ( | ) |
Definition at line 249 of file btRigidBody.cpp.
◆ wantsSleeping()
|
inline |
Definition at line 516 of file btRigidBody.h.
Member Data Documentation
◆ m_additionalAngularDampingFactor
|
private |
Definition at line 80 of file btRigidBody.h.
◆ m_additionalAngularDampingThresholdSqr
|
private |
Definition at line 79 of file btRigidBody.h.
◆ m_additionalDamping
|
private |
Definition at line 76 of file btRigidBody.h.
◆ m_additionalDampingFactor
|
private |
Definition at line 77 of file btRigidBody.h.
◆ m_additionalLinearDampingThresholdSqr
|
private |
Definition at line 78 of file btRigidBody.h.
◆ m_angularDamping
|
private |
Definition at line 74 of file btRigidBody.h.
◆ m_angularFactor
|
protected |
Definition at line 98 of file btRigidBody.h.
◆ m_angularSleepingThreshold
|
private |
Definition at line 83 of file btRigidBody.h.
◆ m_angularVelocity
|
private |
Definition at line 63 of file btRigidBody.h.
◆ m_constraintRefs
|
private |
Definition at line 89 of file btRigidBody.h.
◆ m_contactSolverType
| int btRigidBody::m_contactSolverType |
Definition at line 565 of file btRigidBody.h.
◆ m_debugBodyId
|
private |
Definition at line 93 of file btRigidBody.h.
◆ m_deltaAngularVelocity
|
protected |
Definition at line 97 of file btRigidBody.h.
◆ m_deltaLinearVelocity
|
protected |
Definition at line 96 of file btRigidBody.h.
◆ m_frictionSolverType
| int btRigidBody::m_frictionSolverType |
Definition at line 566 of file btRigidBody.h.
◆ m_gravity
|
private |
Definition at line 67 of file btRigidBody.h.
◆ m_gravity_acceleration
|
private |
Definition at line 68 of file btRigidBody.h.
◆ m_inverseMass
|
private |
Definition at line 64 of file btRigidBody.h.
◆ m_invInertiaLocal
|
private |
Definition at line 69 of file btRigidBody.h.
◆ m_invInertiaTensorWorld
|
private |
Definition at line 61 of file btRigidBody.h.
◆ m_invMass
|
protected |
Definition at line 99 of file btRigidBody.h.
◆ m_linearDamping
|
private |
Definition at line 73 of file btRigidBody.h.
◆ m_linearFactor
|
private |
Definition at line 65 of file btRigidBody.h.
◆ m_linearSleepingThreshold
|
private |
Definition at line 82 of file btRigidBody.h.
◆ m_linearVelocity
|
private |
Definition at line 62 of file btRigidBody.h.
◆ m_optionalMotionState
|
private |
Definition at line 86 of file btRigidBody.h.
◆ m_pushVelocity
|
protected |
Definition at line 100 of file btRigidBody.h.
◆ m_rigidbodyFlags
|
private |
Definition at line 91 of file btRigidBody.h.
◆ m_totalForce
|
private |
Definition at line 70 of file btRigidBody.h.
◆ m_totalTorque
|
private |
Definition at line 71 of file btRigidBody.h.
◆ m_turnVelocity
|
protected |
Definition at line 101 of file btRigidBody.h.
The documentation for this class was generated from the following files: