This file was written by Erwin Coumans. More...
#include <btMultiBodySliderConstraint.h>
Protected Attributes | |
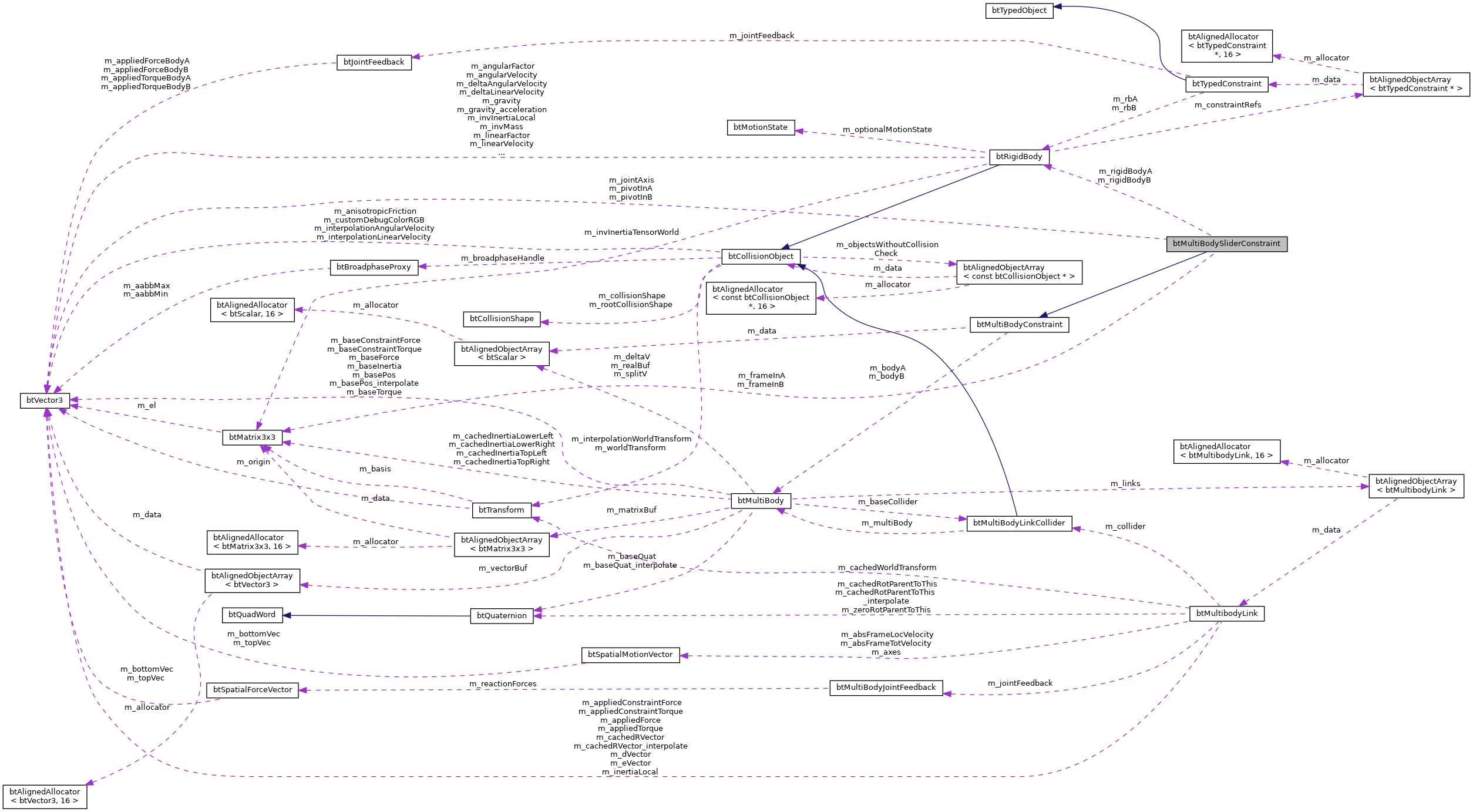
| btRigidBody * | m_rigidBodyA |
| btRigidBody * | m_rigidBodyB |
| btVector3 | m_pivotInA |
| btVector3 | m_pivotInB |
| btMatrix3x3 | m_frameInA |
| btMatrix3x3 | m_frameInB |
| btVector3 | m_jointAxis |
 Protected Attributes inherited from btMultiBodyConstraint Protected Attributes inherited from btMultiBodyConstraint | |
| btMultiBody * | m_bodyA |
| btMultiBody * | m_bodyB |
| int | m_linkA |
| int | m_linkB |
| int | m_type |
| int | m_numRows |
| int | m_jacSizeA |
| int | m_jacSizeBoth |
| int | m_posOffset |
| bool | m_isUnilateral |
| int | m_numDofsFinalized |
| btScalar | m_maxAppliedImpulse |
| btAlignedObjectArray< btScalar > | m_data |
Additional Inherited Members | |
| Protected Member Functions inherited from btMultiBodyConstraint | |
| void | applyDeltaVee (btMultiBodyJacobianData &data, btScalar *delta_vee, btScalar impulse, int velocityIndex, int ndof) |
| btScalar | fillMultiBodyConstraint (btMultiBodySolverConstraint &solverConstraint, btMultiBodyJacobianData &data, btScalar *jacOrgA, btScalar *jacOrgB, const btVector3 &constraintNormalAng, const btVector3 &constraintNormalLin, const btVector3 &posAworld, const btVector3 &posBworld, btScalar posError, const btContactSolverInfo &infoGlobal, btScalar lowerLimit, btScalar upperLimit, bool angConstraint=false, btScalar relaxation=1.f, bool isFriction=false, btScalar desiredVelocity=0, btScalar cfmSlip=0, btScalar damping=1.0) |
Detailed Description
This file was written by Erwin Coumans.
Definition at line 23 of file btMultiBodySliderConstraint.h.
Constructor & Destructor Documentation
◆ btMultiBodySliderConstraint() [1/2]
| btMultiBodySliderConstraint::btMultiBodySliderConstraint | ( | btMultiBody * | body, |
| int | link, | ||
| btRigidBody * | bodyB, | ||
| const btVector3 & | pivotInA, | ||
| const btVector3 & | pivotInB, | ||
| const btMatrix3x3 & | frameInA, | ||
| const btMatrix3x3 & | frameInB, | ||
| const btVector3 & | jointAxis | ||
| ) |
Definition at line 27 of file btMultiBodySliderConstraint.cpp.
◆ btMultiBodySliderConstraint() [2/2]
| btMultiBodySliderConstraint::btMultiBodySliderConstraint | ( | btMultiBody * | bodyA, |
| int | linkA, | ||
| btMultiBody * | bodyB, | ||
| int | linkB, | ||
| const btVector3 & | pivotInA, | ||
| const btVector3 & | pivotInB, | ||
| const btMatrix3x3 & | frameInA, | ||
| const btMatrix3x3 & | frameInB, | ||
| const btVector3 & | jointAxis | ||
| ) |
Definition at line 40 of file btMultiBodySliderConstraint.cpp.
◆ ~btMultiBodySliderConstraint()
|
virtual |
Definition at line 59 of file btMultiBodySliderConstraint.cpp.
Member Function Documentation
◆ createConstraintRows()
|
virtual |
Implements btMultiBodyConstraint.
Definition at line 105 of file btMultiBodySliderConstraint.cpp.
◆ debugDraw()
|
virtual |
Implements btMultiBodyConstraint.
Definition at line 204 of file btMultiBodySliderConstraint.cpp.
◆ finalizeMultiDof()
|
virtual |
Implements btMultiBodyConstraint.
Definition at line 53 of file btMultiBodySliderConstraint.cpp.
◆ getFrameInA()
|
inline |
Definition at line 69 of file btMultiBodySliderConstraint.h.
◆ getFrameInB()
|
inline |
Definition at line 79 of file btMultiBodySliderConstraint.h.
◆ getIslandIdA()
|
virtual |
Implements btMultiBodyConstraint.
Definition at line 63 of file btMultiBodySliderConstraint.cpp.
◆ getIslandIdB()
|
virtual |
Implements btMultiBodyConstraint.
Definition at line 85 of file btMultiBodySliderConstraint.cpp.
◆ getJointAxis()
Definition at line 89 of file btMultiBodySliderConstraint.h.
◆ getPivotInA()
Definition at line 49 of file btMultiBodySliderConstraint.h.
◆ getPivotInB()
Definition at line 59 of file btMultiBodySliderConstraint.h.
◆ setFrameInA()
|
inline |
Definition at line 74 of file btMultiBodySliderConstraint.h.
◆ setFrameInB()
|
inlinevirtual |
Reimplemented from btMultiBodyConstraint.
Definition at line 84 of file btMultiBodySliderConstraint.h.
◆ setJointAxis()
Definition at line 94 of file btMultiBodySliderConstraint.h.
◆ setPivotInA()
Definition at line 54 of file btMultiBodySliderConstraint.h.
◆ setPivotInB()
Reimplemented from btMultiBodyConstraint.
Definition at line 64 of file btMultiBodySliderConstraint.h.
Member Data Documentation
◆ m_frameInA
|
protected |
Definition at line 30 of file btMultiBodySliderConstraint.h.
◆ m_frameInB
|
protected |
Definition at line 31 of file btMultiBodySliderConstraint.h.
◆ m_jointAxis
|
protected |
Definition at line 32 of file btMultiBodySliderConstraint.h.
◆ m_pivotInA
|
protected |
Definition at line 28 of file btMultiBodySliderConstraint.h.
◆ m_pivotInB
|
protected |
Definition at line 29 of file btMultiBodySliderConstraint.h.
◆ m_rigidBodyA
|
protected |
Definition at line 26 of file btMultiBodySliderConstraint.h.
◆ m_rigidBodyB
|
protected |
Definition at line 27 of file btMultiBodySliderConstraint.h.
The documentation for this class was generated from the following files: