|
| | BT_DECLARE_ALIGNED_ALLOCATOR () |
| |
| | btHinge2Constraint (btRigidBody &rbA, btRigidBody &rbB, btVector3 &anchor, btVector3 &axis1, btVector3 &axis2) |
| |
| const btVector3 & | getAnchor () |
| |
| const btVector3 & | getAnchor2 () |
| |
| const btVector3 & | getAxis1 () |
| |
| const btVector3 & | getAxis2 () |
| |
| btScalar | getAngle1 () |
| |
| btScalar | getAngle2 () |
| |
| void | setUpperLimit (btScalar ang1max) |
| |
| void | setLowerLimit (btScalar ang1min) |
| |
| | BT_DECLARE_ALIGNED_ALLOCATOR () |
| |
| | btGeneric6DofSpring2Constraint (btRigidBody &rbA, btRigidBody &rbB, const btTransform &frameInA, const btTransform &frameInB, RotateOrder rotOrder=RO_XYZ) |
| | 2009 March: btGeneric6DofConstraint refactored by Roman Ponomarev Added support for generic constraint solver through getInfo1/getInfo2 methods
|
| |
| | btGeneric6DofSpring2Constraint (btRigidBody &rbB, const btTransform &frameInB, RotateOrder rotOrder=RO_XYZ) |
| |
| virtual void | buildJacobian () |
| | internal method used by the constraint solver, don't use them directly
|
| |
| virtual void | getInfo1 (btConstraintInfo1 *info) |
| | internal method used by the constraint solver, don't use them directly
|
| |
| virtual void | getInfo2 (btConstraintInfo2 *info) |
| | internal method used by the constraint solver, don't use them directly
|
| |
| virtual int | calculateSerializeBufferSize () const |
| |
| virtual const char * | serialize (void *dataBuffer, btSerializer *serializer) const |
| | fills the dataBuffer and returns the struct name (and 0 on failure)
|
| |
| btRotationalLimitMotor2 * | getRotationalLimitMotor (int index) |
| |
| btTranslationalLimitMotor2 * | getTranslationalLimitMotor () |
| |
| void | calculateTransforms (const btTransform &transA, const btTransform &transB) |
| |
| void | calculateTransforms () |
| |
| const btTransform & | getCalculatedTransformA () const |
| |
| const btTransform & | getCalculatedTransformB () const |
| |
| const btTransform & | getFrameOffsetA () const |
| |
| const btTransform & | getFrameOffsetB () const |
| |
| btTransform & | getFrameOffsetA () |
| |
| btTransform & | getFrameOffsetB () |
| |
| btVector3 | getAxis (int axis_index) const |
| |
| btScalar | getAngle (int axis_index) const |
| |
| btScalar | getRelativePivotPosition (int axis_index) const |
| |
| void | setFrames (const btTransform &frameA, const btTransform &frameB) |
| |
| void | setLinearLowerLimit (const btVector3 &linearLower) |
| |
| void | getLinearLowerLimit (btVector3 &linearLower) |
| |
| void | setLinearUpperLimit (const btVector3 &linearUpper) |
| |
| void | getLinearUpperLimit (btVector3 &linearUpper) |
| |
| void | setAngularLowerLimit (const btVector3 &angularLower) |
| |
| void | setAngularLowerLimitReversed (const btVector3 &angularLower) |
| |
| void | getAngularLowerLimit (btVector3 &angularLower) |
| |
| void | getAngularLowerLimitReversed (btVector3 &angularLower) |
| |
| void | setAngularUpperLimit (const btVector3 &angularUpper) |
| |
| void | setAngularUpperLimitReversed (const btVector3 &angularUpper) |
| |
| void | getAngularUpperLimit (btVector3 &angularUpper) |
| |
| void | getAngularUpperLimitReversed (btVector3 &angularUpper) |
| |
| void | setLimit (int axis, btScalar lo, btScalar hi) |
| |
| void | setLimitReversed (int axis, btScalar lo, btScalar hi) |
| |
| bool | isLimited (int limitIndex) |
| |
| void | setRotationOrder (RotateOrder order) |
| |
| RotateOrder | getRotationOrder () |
| |
| void | setAxis (const btVector3 &axis1, const btVector3 &axis2) |
| |
| void | setBounce (int index, btScalar bounce) |
| |
| void | enableMotor (int index, bool onOff) |
| |
| void | setServo (int index, bool onOff) |
| |
| void | setTargetVelocity (int index, btScalar velocity) |
| |
| void | setServoTarget (int index, btScalar target) |
| |
| void | setMaxMotorForce (int index, btScalar force) |
| |
| void | enableSpring (int index, bool onOff) |
| |
| void | setStiffness (int index, btScalar stiffness, bool limitIfNeeded=true) |
| |
| void | setDamping (int index, btScalar damping, bool limitIfNeeded=true) |
| |
| void | setEquilibriumPoint () |
| |
| void | setEquilibriumPoint (int index) |
| |
| void | setEquilibriumPoint (int index, btScalar val) |
| |
| virtual void | setParam (int num, btScalar value, int axis=-1) |
| | override the default global value of a parameter (such as ERP or CFM), optionally provide the axis (0..5).
|
| |
| virtual btScalar | getParam (int num, int axis=-1) const |
| | return the local value of parameter
|
| |
| | BT_DECLARE_ALIGNED_ALLOCATOR () |
| |
| virtual | ~btTypedConstraint () |
| |
| | btTypedConstraint (btTypedConstraintType type, btRigidBody &rbA) |
| |
| | btTypedConstraint (btTypedConstraintType type, btRigidBody &rbA, btRigidBody &rbB) |
| |
| int | getOverrideNumSolverIterations () const |
| |
| void | setOverrideNumSolverIterations (int overideNumIterations) |
| | override the number of constraint solver iterations used to solve this constraint -1 will use the default number of iterations, as specified in SolverInfo.m_numIterations
|
| |
| virtual void | setupSolverConstraint (btConstraintArray &ca, int solverBodyA, int solverBodyB, btScalar timeStep) |
| | internal method used by the constraint solver, don't use them directly
|
| |
| void | internalSetAppliedImpulse (btScalar appliedImpulse) |
| | internal method used by the constraint solver, don't use them directly
|
| |
| btScalar | internalGetAppliedImpulse () |
| | internal method used by the constraint solver, don't use them directly
|
| |
| btScalar | getBreakingImpulseThreshold () const |
| |
| void | setBreakingImpulseThreshold (btScalar threshold) |
| |
| bool | isEnabled () const |
| |
| void | setEnabled (bool enabled) |
| |
| virtual void | solveConstraintObsolete (btSolverBody &, btSolverBody &, btScalar) |
| | internal method used by the constraint solver, don't use them directly
|
| |
| const btRigidBody & | getRigidBodyA () const |
| |
| const btRigidBody & | getRigidBodyB () const |
| |
| btRigidBody & | getRigidBodyA () |
| |
| btRigidBody & | getRigidBodyB () |
| |
| int | getUserConstraintType () const |
| |
| void | setUserConstraintType (int userConstraintType) |
| |
| void | setUserConstraintId (int uid) |
| |
| int | getUserConstraintId () const |
| |
| void | setUserConstraintPtr (void *ptr) |
| |
| void * | getUserConstraintPtr () |
| |
| void | setJointFeedback (btJointFeedback *jointFeedback) |
| |
| const btJointFeedback * | getJointFeedback () const |
| |
| btJointFeedback * | getJointFeedback () |
| |
| int | getUid () const |
| |
| bool | needsFeedback () const |
| |
| void | enableFeedback (bool needsFeedback) |
| | enableFeedback will allow to read the applied linear and angular impulse use getAppliedImpulse, getAppliedLinearImpulse and getAppliedAngularImpulse to read feedback information
|
| |
| btScalar | getAppliedImpulse () const |
| | getAppliedImpulse is an estimated total applied impulse.
|
| |
| btTypedConstraintType | getConstraintType () const |
| |
| void | setDbgDrawSize (btScalar dbgDrawSize) |
| |
| btScalar | getDbgDrawSize () |
| |
| | btTypedObject (int objectType) |
| |
| int | getObjectType () const |
| |
|
| static btScalar | btGetMatrixElem (const btMatrix3x3 &mat, int index) |
| |
| static bool | matrixToEulerXYZ (const btMatrix3x3 &mat, btVector3 &xyz) |
| |
| static bool | matrixToEulerXZY (const btMatrix3x3 &mat, btVector3 &xyz) |
| |
| static bool | matrixToEulerYXZ (const btMatrix3x3 &mat, btVector3 &xyz) |
| |
| static bool | matrixToEulerYZX (const btMatrix3x3 &mat, btVector3 &xyz) |
| |
| static bool | matrixToEulerZXY (const btMatrix3x3 &mat, btVector3 &xyz) |
| |
| static bool | matrixToEulerZYX (const btMatrix3x3 &mat, btVector3 &xyz) |
| |
| static btRigidBody & | getFixedBody () |
| |
| int | m_objectType |
| |
| btGeneric6DofSpring2Constraint & | operator= (const btGeneric6DofSpring2Constraint &) |
| |
| int | setAngularLimits (btConstraintInfo2 *info, int row_offset, const btTransform &transA, const btTransform &transB, const btVector3 &linVelA, const btVector3 &linVelB, const btVector3 &angVelA, const btVector3 &angVelB) |
| |
| int | setLinearLimits (btConstraintInfo2 *info, int row, const btTransform &transA, const btTransform &transB, const btVector3 &linVelA, const btVector3 &linVelB, const btVector3 &angVelA, const btVector3 &angVelB) |
| |
| void | calculateLinearInfo () |
| |
| void | calculateAngleInfo () |
| |
| void | testAngularLimitMotor (int axis_index) |
| |
| void | calculateJacobi (btRotationalLimitMotor2 *limot, const btTransform &transA, const btTransform &transB, btConstraintInfo2 *info, int srow, btVector3 &ax1, int rotational, int rotAllowed) |
| |
| int | get_limit_motor_info2 (btRotationalLimitMotor2 *limot, const btTransform &transA, const btTransform &transB, const btVector3 &linVelA, const btVector3 &linVelB, const btVector3 &angVelA, const btVector3 &angVelB, btConstraintInfo2 *info, int row, btVector3 &ax1, int rotational, int rotAllowed=false) |
| |
| btScalar | getMotorFactor (btScalar pos, btScalar lowLim, btScalar uppLim, btScalar vel, btScalar timeFact) |
| | internal method used by the constraint solver, don't use them directly
|
| |
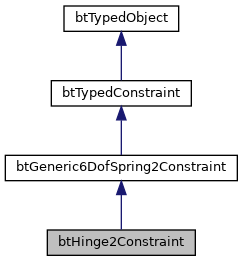
Definition at line 28 of file btHinge2Constraint.h.
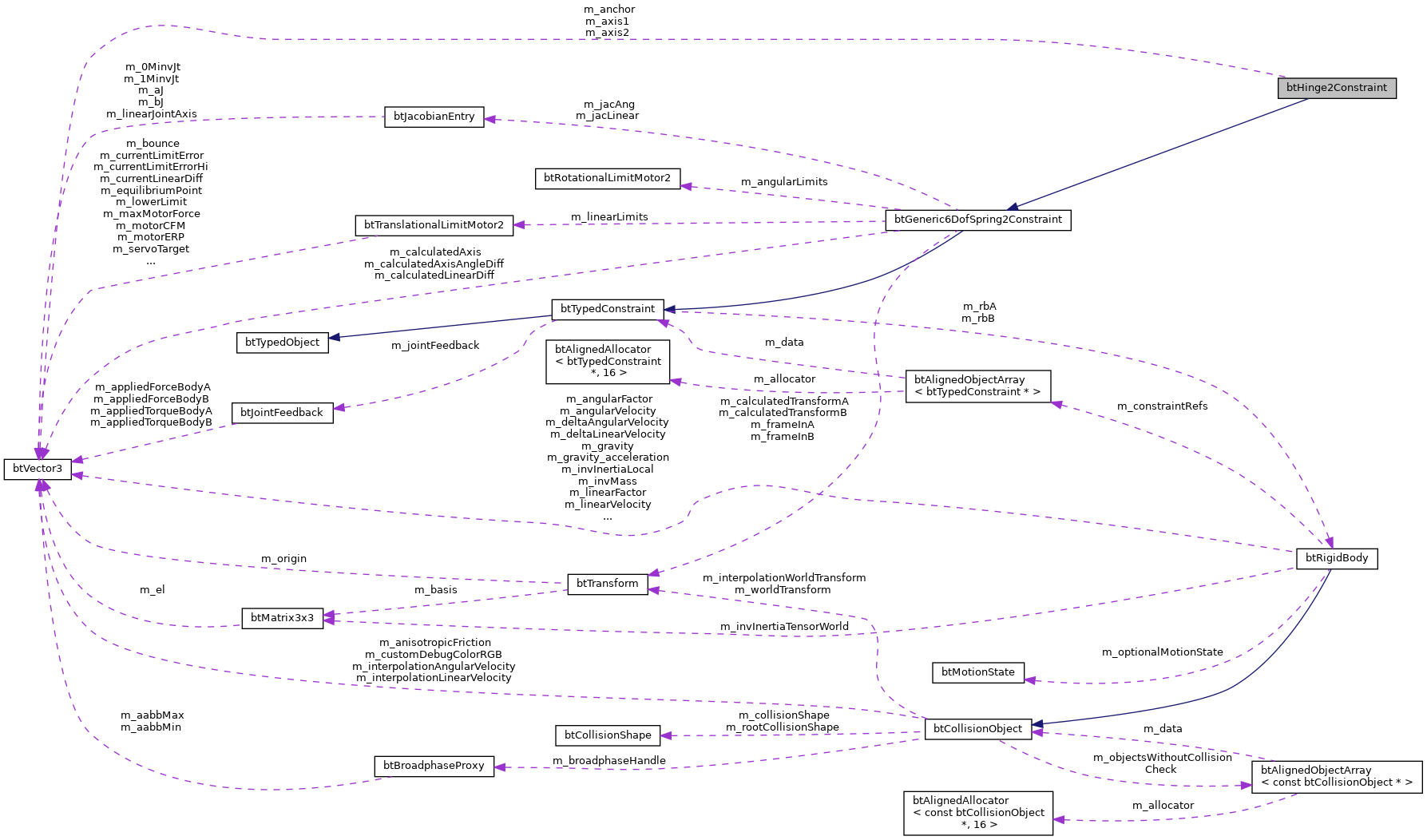
 Protected Attributes inherited from btGeneric6DofSpring2Constraint
Protected Attributes inherited from btGeneric6DofSpring2Constraint