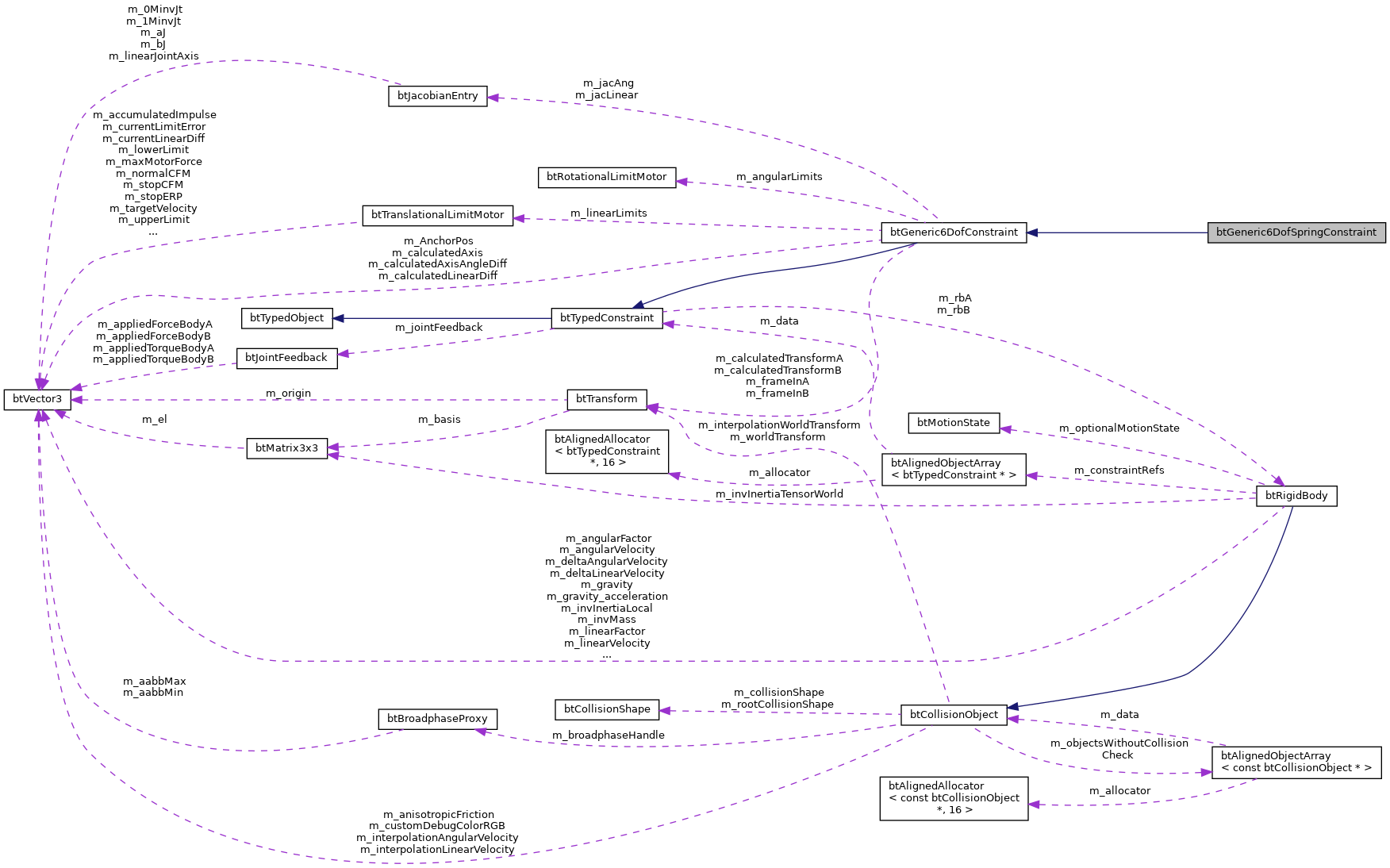
Generic 6 DOF constraint that allows to set spring motors to any translational and rotational DOF. More...
#include <btGeneric6DofSpringConstraint.h>
Additional Inherited Members | |
 Static Public Member Functions inherited from btTypedConstraint Static Public Member Functions inherited from btTypedConstraint | |
| static btRigidBody & | getFixedBody () |
| Public Attributes inherited from btGeneric6DofConstraint | |
| bool | m_useSolveConstraintObsolete |
| for backwards compatibility during the transition to 'getInfo/getInfo2' | |
| Public Attributes inherited from btTypedObject | |
| int | m_objectType |
Detailed Description
Generic 6 DOF constraint that allows to set spring motors to any translational and rotational DOF.
DOF index used in enableSpring() and setStiffness() means: 0 : translation X 1 : translation Y 2 : translation Z 3 : rotation X (3rd Euler rotational around new position of X axis, range [-PI+epsilon, PI-epsilon] ) 4 : rotation Y (2nd Euler rotational around new position of Y axis, range [-PI/2+epsilon, PI/2-epsilon] ) 5 : rotation Z (1st Euler rotational around Z axis, range [-PI+epsilon, PI-epsilon] )
Definition at line 41 of file btGeneric6DofSpringConstraint.h.
Constructor & Destructor Documentation
◆ btGeneric6DofSpringConstraint() [1/2]
| btGeneric6DofSpringConstraint::btGeneric6DofSpringConstraint | ( | btRigidBody & | rbA, |
| btRigidBody & | rbB, | ||
| const btTransform & | frameInA, | ||
| const btTransform & | frameInB, | ||
| bool | useLinearReferenceFrameA | ||
| ) |
Definition at line 20 of file btGeneric6DofSpringConstraint.cpp.
◆ btGeneric6DofSpringConstraint() [2/2]
| btGeneric6DofSpringConstraint::btGeneric6DofSpringConstraint | ( | btRigidBody & | rbB, |
| const btTransform & | frameInB, | ||
| bool | useLinearReferenceFrameB | ||
| ) |
Definition at line 26 of file btGeneric6DofSpringConstraint.cpp.
Member Function Documentation
◆ BT_DECLARE_ALIGNED_ALLOCATOR()
| btGeneric6DofSpringConstraint::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
◆ calculateSerializeBufferSize()
|
inlinevirtual |
Reimplemented from btGeneric6DofConstraint.
Definition at line 113 of file btGeneric6DofSpringConstraint.h.
◆ enableSpring()
Definition at line 45 of file btGeneric6DofSpringConstraint.cpp.
◆ getDamping()
Definition at line 74 of file btGeneric6DofSpringConstraint.h.
◆ getEquilibriumPoint()
Definition at line 79 of file btGeneric6DofSpringConstraint.h.
◆ getInfo2()
|
virtual |
internal method used by the constraint solver, don't use them directly
Reimplemented from btGeneric6DofConstraint.
Definition at line 143 of file btGeneric6DofSpringConstraint.cpp.
◆ getStiffness()
Definition at line 69 of file btGeneric6DofSpringConstraint.h.
◆ init()
|
protected |
Definition at line 32 of file btGeneric6DofSpringConstraint.cpp.
◆ internalUpdateSprings()
|
protected |
Definition at line 106 of file btGeneric6DofSpringConstraint.cpp.
◆ isSpringEnabled()
Definition at line 64 of file btGeneric6DofSpringConstraint.h.
◆ serialize()
|
inlinevirtual |
fills the dataBuffer and returns the struct name (and 0 on failure)
Reimplemented from btGeneric6DofConstraint.
Definition at line 119 of file btGeneric6DofSpringConstraint.h.
◆ setAxis()
|
virtual |
Definition at line 152 of file btGeneric6DofSpringConstraint.cpp.
◆ setDamping()
Definition at line 65 of file btGeneric6DofSpringConstraint.cpp.
◆ setEquilibriumPoint() [1/3]
| void btGeneric6DofSpringConstraint::setEquilibriumPoint | ( | ) |
Definition at line 71 of file btGeneric6DofSpringConstraint.cpp.
◆ setEquilibriumPoint() [2/3]
Definition at line 86 of file btGeneric6DofSpringConstraint.cpp.
◆ setEquilibriumPoint() [3/3]
Definition at line 100 of file btGeneric6DofSpringConstraint.cpp.
◆ setStiffness()
Definition at line 59 of file btGeneric6DofSpringConstraint.cpp.
Member Data Documentation
◆ m_equilibriumPoint
|
protected |
Definition at line 46 of file btGeneric6DofSpringConstraint.h.
◆ m_springDamping
|
protected |
Definition at line 48 of file btGeneric6DofSpringConstraint.h.
◆ m_springEnabled
|
protected |
Definition at line 45 of file btGeneric6DofSpringConstraint.h.
◆ m_springStiffness
|
protected |
Definition at line 47 of file btGeneric6DofSpringConstraint.h.
The documentation for this class was generated from the following files: