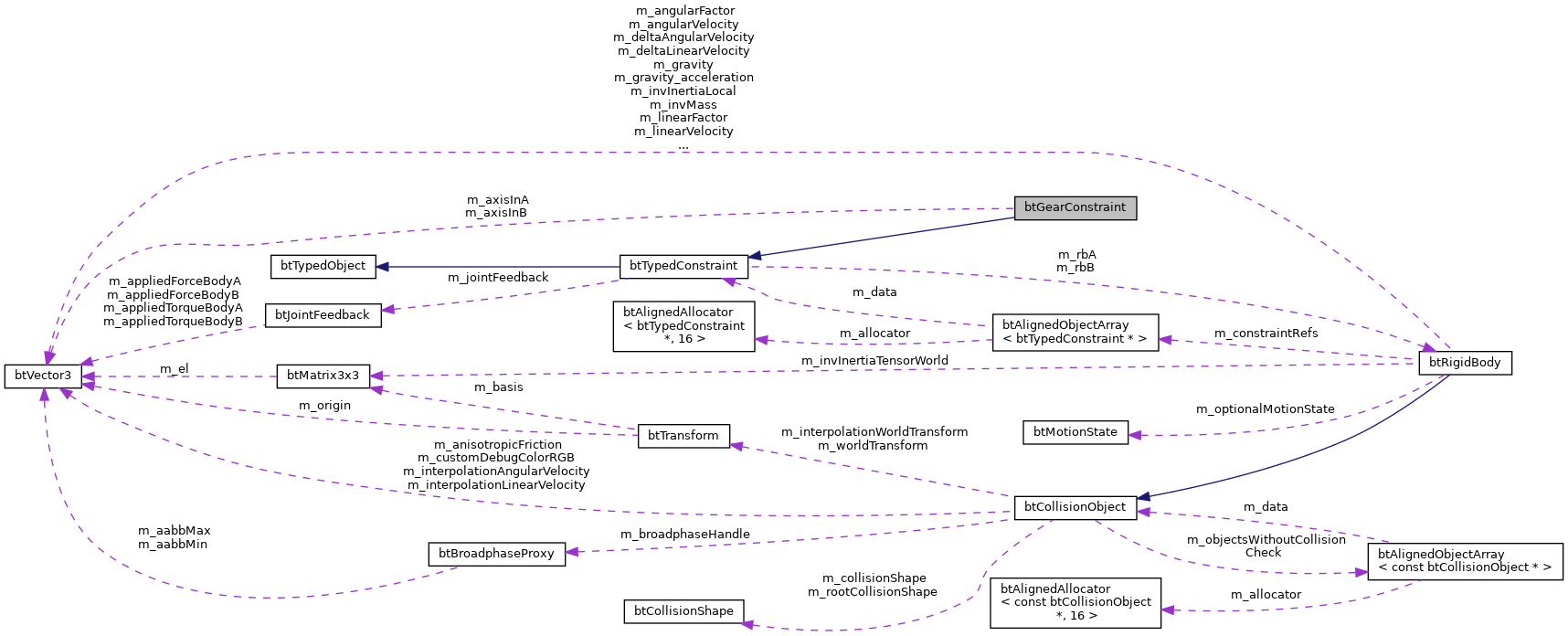
The btGeatConstraint will couple the angular velocity for two bodies around given local axis and ratio. More...
#include <btGearConstraint.h>
Protected Attributes | |
| btVector3 | m_axisInA |
| btVector3 | m_axisInB |
| bool | m_useFrameA |
| btScalar | m_ratio |
 Protected Attributes inherited from btTypedConstraint Protected Attributes inherited from btTypedConstraint | |
| btRigidBody & | m_rbA |
| btRigidBody & | m_rbB |
| btScalar | m_appliedImpulse |
| btScalar | m_dbgDrawSize |
| btJointFeedback * | m_jointFeedback |
Additional Inherited Members | |
| Static Public Member Functions inherited from btTypedConstraint | |
| static btRigidBody & | getFixedBody () |
| Public Attributes inherited from btTypedObject | |
| int | m_objectType |
| Protected Member Functions inherited from btTypedConstraint | |
| btScalar | getMotorFactor (btScalar pos, btScalar lowLim, btScalar uppLim, btScalar vel, btScalar timeFact) |
| internal method used by the constraint solver, don't use them directly | |
Detailed Description
The btGeatConstraint will couple the angular velocity for two bodies around given local axis and ratio.
See Bullet/Demos/ConstraintDemo for an example use.
Definition at line 31 of file btGearConstraint.h.
Constructor & Destructor Documentation
◆ btGearConstraint()
| btGearConstraint::btGearConstraint | ( | btRigidBody & | rbA, |
| btRigidBody & | rbB, | ||
| const btVector3 & | axisInA, | ||
| const btVector3 & | axisInB, | ||
| btScalar | ratio = 1.f |
||
| ) |
Implemented by Erwin Coumans. The idea for the constraint comes from Dimitris Papavasiliou.
Definition at line 20 of file btGearConstraint.cpp.
◆ ~btGearConstraint()
|
virtual |
Definition at line 28 of file btGearConstraint.cpp.
Member Function Documentation
◆ calculateSerializeBufferSize()
|
inlinevirtual |
Reimplemented from btTypedConstraint.
Definition at line 119 of file btGearConstraint.h.
◆ getAxisA()
Definition at line 61 of file btGearConstraint.h.
◆ getAxisB()
Definition at line 65 of file btGearConstraint.h.
◆ getInfo1()
|
virtual |
internal method used by the constraint solver, don't use them directly
Implements btTypedConstraint.
Definition at line 32 of file btGearConstraint.cpp.
◆ getInfo2()
|
virtual |
internal method used by the constraint solver, don't use them directly
Implements btTypedConstraint.
Definition at line 38 of file btGearConstraint.cpp.
◆ getParam()
return the local value of parameter
Implements btTypedConstraint.
Definition at line 83 of file btGearConstraint.h.
◆ getRatio()
|
inline |
Definition at line 69 of file btGearConstraint.h.
◆ serialize()
|
inlinevirtual |
fills the dataBuffer and returns the struct name (and 0 on failure)
Reimplemented from btTypedConstraint.
Definition at line 125 of file btGearConstraint.h.
◆ setAxisA()
Definition at line 49 of file btGearConstraint.h.
◆ setAxisB()
Definition at line 53 of file btGearConstraint.h.
◆ setParam()
override the default global value of a parameter (such as ERP or CFM), optionally provide the axis (0..5).
If no axis is provided, it uses the default axis for this constraint.
Implements btTypedConstraint.
Definition at line 74 of file btGearConstraint.h.
◆ setRatio()
Definition at line 57 of file btGearConstraint.h.
Member Data Documentation
◆ m_axisInA
|
protected |
Definition at line 34 of file btGearConstraint.h.
◆ m_axisInB
|
protected |
Definition at line 35 of file btGearConstraint.h.
◆ m_ratio
|
protected |
Definition at line 37 of file btGearConstraint.h.
◆ m_useFrameA
|
protected |
Definition at line 36 of file btGearConstraint.h.
The documentation for this class was generated from the following files: