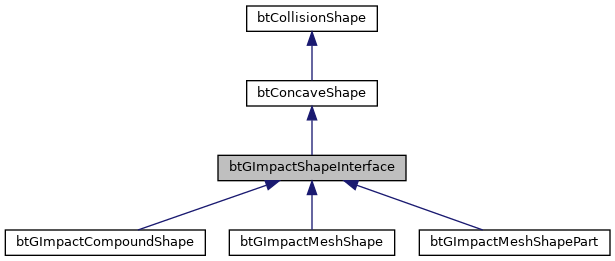
Base class for gimpact shapes. More...
#include <btGImpactShape.h>
Protected Member Functions | |
| virtual void | calcLocalAABB () |
| use this function for perfofm refit in bounding boxes use this function for perfofm refit in bounding boxes | |
Protected Attributes | |
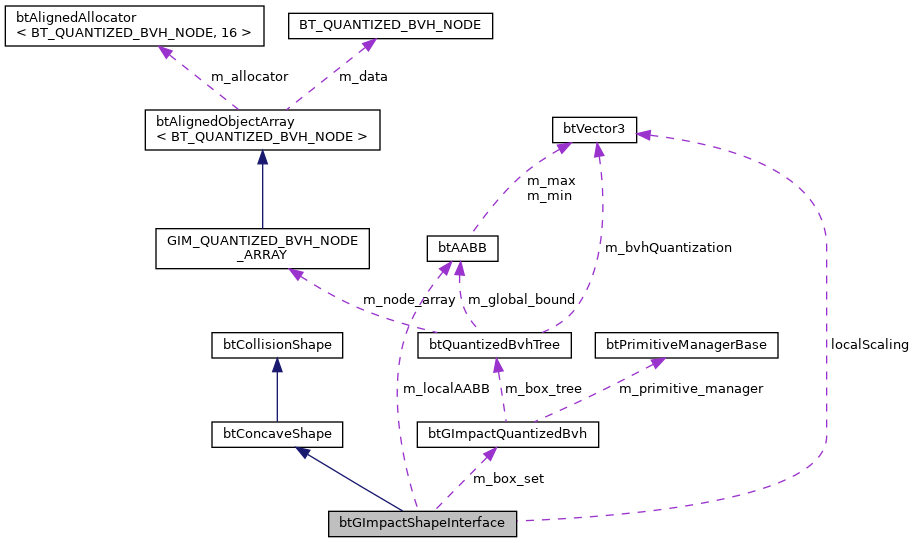
| btAABB | m_localAABB |
| bool | m_needs_update |
| btVector3 | localScaling |
| btGImpactBoxSet | m_box_set |
 Protected Attributes inherited from btConcaveShape Protected Attributes inherited from btConcaveShape | |
| btScalar | m_collisionMargin |
| Protected Attributes inherited from btCollisionShape | |
| int | m_shapeType |
| void * | m_userPointer |
| int | m_userIndex |
| int | m_userIndex2 |
Detailed Description
Base class for gimpact shapes.
Definition at line 73 of file btGImpactShape.h.
Constructor & Destructor Documentation
◆ btGImpactShapeInterface()
|
inline |
Definition at line 100 of file btGImpactShape.h.
Member Function Documentation
◆ calcLocalAABB()
use this function for perfofm refit in bounding boxes use this function for perfofm refit in bounding boxes
Reimplemented in btGImpactMeshShape.
Definition at line 83 of file btGImpactShape.h.
◆ childrenHasTransform()
if true, then its children must get transforms.
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ getAabb()
|
inlinevirtual |
If the Bounding box is not updated, then this class attemps to calculate it.
- Postcondition
- Calls updateBound() for update the box set.
Implements btCollisionShape.
Definition at line 126 of file btGImpactShape.h.
◆ getBoxSet()
|
inline |
gets boxset
Definition at line 185 of file btGImpactShape.h.
◆ getBulletTetrahedron()
|
pure virtual |
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ getBulletTriangle()
|
pure virtual |
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ getChildAabb()
|
inlinevirtual |
Retrieves the bound from a child.
Reimplemented in btGImpactCompoundShape, and btGImpactMeshShape.
Definition at line 234 of file btGImpactShape.h.
◆ getChildShape() [1/2]
|
pure virtual |
Gets the child.
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ getChildShape() [2/2]
|
pure virtual |
Gets the children.
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ getChildTransform()
|
pure virtual |
Gets the children transform.
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ getGImpactShapeType()
|
pure virtual |
Subshape member functions.
Base method for determinig which kind of GIMPACT shape we get
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ getLocalBox()
Obtains the local box, which is the global calculated box of the total of subshapes.
Definition at line 141 of file btGImpactShape.h.
◆ getLocalScaling()
Implements btCollisionShape.
Reimplemented in btGImpactMeshShapePart.
Definition at line 160 of file btGImpactShape.h.
◆ getNumChildShapes()
Gets the number of children.
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ getPrimitiveManager()
|
pure virtual |
Obtains the primitive manager.
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ getPrimitiveTriangle()
|
inline |
if this trimesh
Definition at line 226 of file btGImpactShape.h.
◆ getShapeType()
Definition at line 146 of file btGImpactShape.h.
◆ hasBoxSet()
|
inline |
Determines if this class has a hierarchy structure for sorting its primitives.
Definition at line 191 of file btGImpactShape.h.
◆ lockChildShapes()
call when reading child shapes
Reimplemented in btGImpactMeshShapePart, and btGImpactMeshShape.
Definition at line 217 of file btGImpactShape.h.
◆ needsRetrieveTetrahedrons()
Determines if this shape has tetrahedrons.
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ needsRetrieveTriangles()
Determines if this shape has triangles.
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ postUpdate()
Tells to this object that is needed to refit the box set.
Reimplemented in btGImpactMeshShape.
Definition at line 135 of file btGImpactShape.h.
◆ processAllTriangles()
|
inlinevirtual |
Function for retrieve triangles.
It gives the triangles in local space
Implements btConcaveShape.
Reimplemented in btGImpactMeshShapePart, and btGImpactMeshShape.
Definition at line 272 of file btGImpactShape.h.
◆ processAllTrianglesRay()
|
inlinevirtual |
Function for retrieve triangles.
It gives the triangles in local space
Reimplemented in btGImpactMeshShapePart, and btGImpactMeshShape.
Definition at line 283 of file btGImpactShape.h.
◆ rayTest()
|
inlinevirtual |
virtual method for ray collision
Reimplemented in btGImpactMeshShape.
Definition at line 261 of file btGImpactShape.h.
◆ setChildTransform()
|
pure virtual |
Sets the children transform.
- Postcondition
- You must call updateBound() for update the box set.
Implemented in btGImpactCompoundShape, btGImpactMeshShapePart, and btGImpactMeshShape.
◆ setLocalScaling()
- Postcondition
- You must call updateBound() for update the box set.
Implements btCollisionShape.
Reimplemented in btGImpactMeshShapePart, and btGImpactMeshShape.
Definition at line 154 of file btGImpactShape.h.
◆ setMargin()
Reimplemented from btConcaveShape.
Reimplemented in btGImpactMeshShapePart, and btGImpactMeshShape.
Definition at line 165 of file btGImpactShape.h.
◆ unlockChildShapes()
Reimplemented in btGImpactMeshShapePart, and btGImpactMeshShape.
Definition at line 221 of file btGImpactShape.h.
◆ updateBound()
|
inline |
performs refit operation
Updates the entire Box set of this shape.
- Precondition
- postUpdate() must be called for attemps to calculating the box set, else this function will does nothing.
- Postcondition
- if m_needs_update == true, then it calls calcLocalAABB();
Definition at line 115 of file btGImpactShape.h.
Member Data Documentation
◆ localScaling
|
protected |
Definition at line 78 of file btGImpactShape.h.
◆ m_box_set
|
protected |
Definition at line 79 of file btGImpactShape.h.
◆ m_localAABB
|
protected |
Definition at line 76 of file btGImpactShape.h.
◆ m_needs_update
|
protected |
Definition at line 77 of file btGImpactShape.h.
The documentation for this class was generated from the following file: