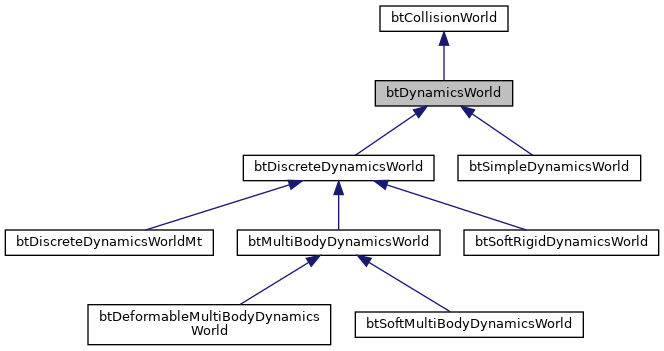
The btDynamicsWorld is the interface class for several dynamics implementation, basic, discrete, parallel, and continuous etc. More...
#include <btDynamicsWorld.h>

Protected Attributes | |
| btInternalTickCallback | m_internalTickCallback |
| btInternalTickCallback | m_internalPreTickCallback |
| void * | m_worldUserInfo |
| btContactSolverInfo | m_solverInfo |
 Protected Attributes inherited from btCollisionWorld Protected Attributes inherited from btCollisionWorld | |
| btAlignedObjectArray< btCollisionObject * > | m_collisionObjects |
| btDispatcher * | m_dispatcher1 |
| btDispatcherInfo | m_dispatchInfo |
| btBroadphaseInterface * | m_broadphasePairCache |
| btIDebugDraw * | m_debugDrawer |
| bool | m_forceUpdateAllAabbs |
| m_forceUpdateAllAabbs can be set to false as an optimization to only update active object AABBs it is true by default, because it is error-prone (setting the position of static objects wouldn't update their AABB) | |
Detailed Description
The btDynamicsWorld is the interface class for several dynamics implementation, basic, discrete, parallel, and continuous etc.
Definition at line 42 of file btDynamicsWorld.h.
Constructor & Destructor Documentation
◆ btDynamicsWorld()
|
inline |
Definition at line 52 of file btDynamicsWorld.h.
◆ ~btDynamicsWorld()
|
inlinevirtual |
Definition at line 57 of file btDynamicsWorld.h.
Member Function Documentation
◆ addAction()
|
pure virtual |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
◆ addCharacter()
|
inlinevirtual |
obsolete, use addAction instead.
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 155 of file btDynamicsWorld.h.
◆ addConstraint()
|
inlinevirtual |
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 69 of file btDynamicsWorld.h.
◆ addRigidBody() [1/2]
|
pure virtual |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
◆ addRigidBody() [2/2]
|
pure virtual |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
◆ addVehicle()
|
inlinevirtual |
obsolete, use addAction instead.
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 151 of file btDynamicsWorld.h.
◆ clearForces()
Implemented in btDiscreteDynamicsWorld, btSimpleDynamicsWorld, and btMultiBodyDynamicsWorld.
◆ debugDrawWorld()
Reimplemented from btCollisionWorld.
Implemented in btDiscreteDynamicsWorld, btSimpleDynamicsWorld, btMultiBodyDynamicsWorld, btDeformableMultiBodyDynamicsWorld, btSoftMultiBodyDynamicsWorld, and btSoftRigidDynamicsWorld.
◆ getConstraint() [1/2]
|
inlinevirtual |
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 100 of file btDynamicsWorld.h.
◆ getConstraint() [2/2]
|
inlinevirtual |
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 106 of file btDynamicsWorld.h.
◆ getConstraintSolver()
|
pure virtual |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
◆ getGravity()
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
◆ getNumConstraints()
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 98 of file btDynamicsWorld.h.
◆ getSolverInfo() [1/2]
|
inline |
Definition at line 140 of file btDynamicsWorld.h.
◆ getSolverInfo() [2/2]
|
inline |
Definition at line 145 of file btDynamicsWorld.h.
◆ getWorldType()
|
pure virtual |
◆ getWorldUserInfo()
|
inline |
Definition at line 135 of file btDynamicsWorld.h.
◆ removeAction()
|
pure virtual |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
◆ removeCharacter()
|
inlinevirtual |
obsolete, use removeAction instead
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 157 of file btDynamicsWorld.h.
◆ removeConstraint()
|
inlinevirtual |
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 75 of file btDynamicsWorld.h.
◆ removeRigidBody()
|
pure virtual |
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
◆ removeVehicle()
|
inlinevirtual |
obsolete, use removeAction instead
Reimplemented in btDiscreteDynamicsWorld.
Definition at line 153 of file btDynamicsWorld.h.
◆ setConstraintSolver()
|
pure virtual |
Implemented in btDiscreteDynamicsWorld, btSimpleDynamicsWorld, and btMultiBodyDynamicsWorld.
◆ setGravity()
Implemented in btDiscreteDynamicsWorld, btSimpleDynamicsWorld, and btDeformableMultiBodyDynamicsWorld.
◆ setInternalTickCallback()
|
inline |
Set the callback for when an internal tick (simulation substep) happens, optional user info.
Definition at line 117 of file btDynamicsWorld.h.
◆ setWorldUserInfo()
Definition at line 130 of file btDynamicsWorld.h.
◆ stepSimulation()
|
pure virtual |
stepSimulation proceeds the simulation over 'timeStep', units in preferably in seconds.
By default, Bullet will subdivide the timestep in constant substeps of each 'fixedTimeStep'. in order to keep the simulation real-time, the maximum number of substeps can be clamped to 'maxSubSteps'. You can disable subdividing the timestep/substepping by passing maxSubSteps=0 as second argument to stepSimulation, but in that case you have to keep the timeStep constant.
Implemented in btDiscreteDynamicsWorldMt, btDiscreteDynamicsWorld, btSimpleDynamicsWorld, and btDeformableMultiBodyDynamicsWorld.
◆ synchronizeMotionStates()
Implemented in btDiscreteDynamicsWorld, and btSimpleDynamicsWorld.
Member Data Documentation
◆ m_internalPreTickCallback
|
protected |
Definition at line 46 of file btDynamicsWorld.h.
◆ m_internalTickCallback
|
protected |
Definition at line 45 of file btDynamicsWorld.h.
◆ m_solverInfo
|
protected |
Definition at line 49 of file btDynamicsWorld.h.
◆ m_worldUserInfo
|
protected |
Definition at line 47 of file btDynamicsWorld.h.
The documentation for this class was generated from the following file: