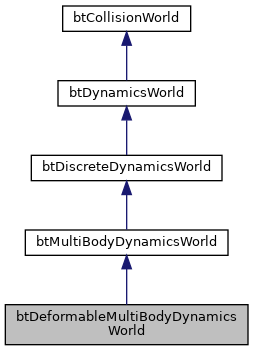
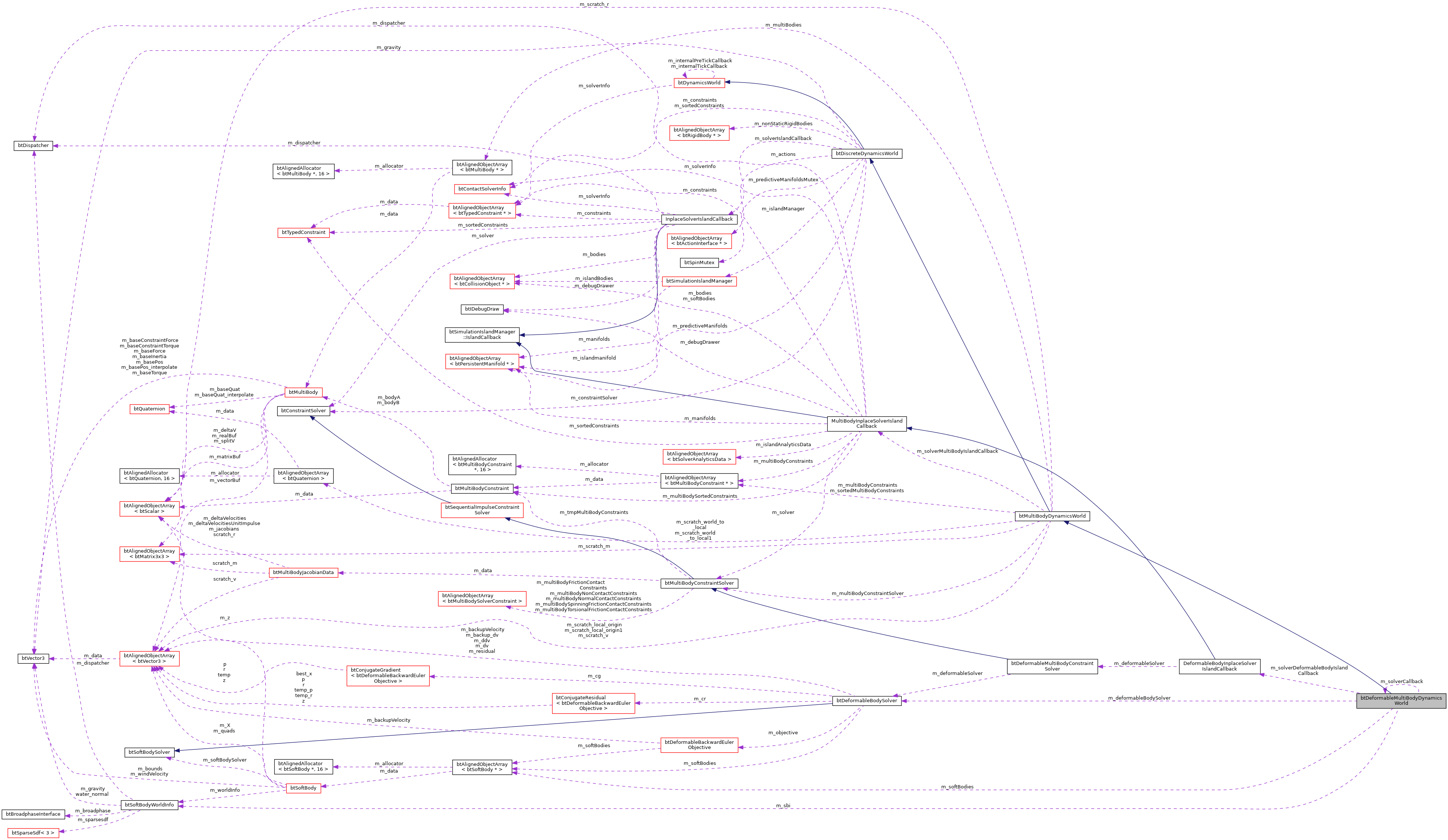
#include <btDeformableMultiBodyDynamicsWorld.h>
Classes | |
| struct | btDeformableSingleRayCallback |
 Public Member Functions inherited from
Public Member Functions inherited from Private Types | |
| typedef btAlignedObjectArray< btVector3 > | TVStack |
| typedef void(* | btSolverCallback) (btScalar time, btDeformableMultiBodyDynamicsWorld *world) |
Private Attributes | |
| btDeformableBodySolver * | m_deformableBodySolver |
| Solver classes that encapsulate multiple deformable bodies for solving. | |
| btSoftBodyArray | m_softBodies |
| int | m_drawFlags |
| bool | m_drawNodeTree |
| bool | m_drawFaceTree |
| bool | m_drawClusterTree |
| btSoftBodyWorldInfo | m_sbi |
| btScalar | m_internalTime |
| int | m_ccdIterations |
| bool | m_implicit |
| bool | m_lineSearch |
| bool | m_useProjection |
| DeformableBodyInplaceSolverIslandCallback * | m_solverDeformableBodyIslandCallback |
| btSolverCallback | m_solverCallback |
Detailed Description
Definition at line 37 of file btDeformableMultiBodyDynamicsWorld.h.
Member Typedef Documentation
◆ btSolverCallback
|
private |
Definition at line 55 of file btDeformableMultiBodyDynamicsWorld.h.
◆ TVStack
Definition at line 39 of file btDeformableMultiBodyDynamicsWorld.h.
Constructor & Destructor Documentation
◆ btDeformableMultiBodyDynamicsWorld()
| btDeformableMultiBodyDynamicsWorld::btDeformableMultiBodyDynamicsWorld | ( | btDispatcher * | dispatcher, |
| btBroadphaseInterface * | pairCache, | ||
| btDeformableMultiBodyConstraintSolver * | constraintSolver, | ||
| btCollisionConfiguration * | collisionConfiguration, | ||
| btDeformableBodySolver * | deformableBodySolver = 0 |
||
| ) |
Definition at line 42 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ ~btDeformableMultiBodyDynamicsWorld()
|
virtual |
Definition at line 70 of file btDeformableMultiBodyDynamicsWorld.cpp.
Member Function Documentation
◆ addForce()
| void btDeformableMultiBodyDynamicsWorld::addForce | ( | btSoftBody * | psb, |
| btDeformableLagrangianForce * | force | ||
| ) |
Definition at line 613 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ addSoftBody()
|
virtual |
Definition at line 426 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ afterSolverCallbacks()
Definition at line 605 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ applyRepulsionForce()
Definition at line 163 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ applyRigidBodyGravity()
Definition at line 491 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ beforeSolverCallbacks()
Definition at line 592 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ clearGravity()
|
protected |
Definition at line 551 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ debugDrawWorld()
|
virtual |
Reimplemented from btMultiBodyDynamicsWorld.
Definition at line 477 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ getDrawFlags()
|
inline |
Definition at line 144 of file btDeformableMultiBodyDynamicsWorld.h.
◆ getMultiBodyDynamicsWorld() [1/2]
|
inlinevirtual |
Definition at line 85 of file btDeformableMultiBodyDynamicsWorld.h.
◆ getMultiBodyDynamicsWorld() [2/2]
|
inlinevirtual |
Definition at line 90 of file btDeformableMultiBodyDynamicsWorld.h.
◆ getSoftBodyArray() [1/2]
|
inline |
Definition at line 104 of file btDeformableMultiBodyDynamicsWorld.h.
◆ getSoftBodyArray() [2/2]
|
inline |
Definition at line 109 of file btDeformableMultiBodyDynamicsWorld.h.
◆ getWorldInfo() [1/2]
|
inline |
Definition at line 114 of file btDeformableMultiBodyDynamicsWorld.h.
◆ getWorldInfo() [2/2]
|
inline |
Definition at line 119 of file btDeformableMultiBodyDynamicsWorld.h.
◆ getWorldType()
|
inlinevirtual |
Reimplemented from btDiscreteDynamicsWorld.
Definition at line 95 of file btDeformableMultiBodyDynamicsWorld.h.
◆ integrateTransforms()
Reimplemented from btMultiBodyDynamicsWorld.
Definition at line 296 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ internalSingleStepSimulation()
|
protectedvirtual |
apply gravity and explicit force to velocity, predict motion
perform collision detection that involves rigid/multi bodies
update vehicle simulation
Reimplemented from btDiscreteDynamicsWorld.
Definition at line 75 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ performDeformableCollisionDetection()
| void btDeformableMultiBodyDynamicsWorld::performDeformableCollisionDetection | ( | ) |
Definition at line 118 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ performGeometricCollisions()
Definition at line 176 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ positionCorrection()
Definition at line 274 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ predictUnconstraintMotion()
Reimplemented from btMultiBodyDynamicsWorld.
Definition at line 439 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ rayTest()
|
inlinevirtual |
rayTest performs a raycast on all objects in the btCollisionWorld, and calls the resultCallback This allows for several queries: first hit, all hits, any hit, dependent on the value returned by the callback.
use the broadphase to accelerate the search for objects, based on their aabb and for each object with ray-aabb overlap, perform an exact ray test
use the broadphase to accelerate the search for objects, based on their aabb and for each object with ray-aabb overlap, perform an exact ray test
Reimplemented from btCollisionWorld.
Definition at line 252 of file btDeformableMultiBodyDynamicsWorld.h.
◆ rayTestSingle()
|
inline |
Definition at line 269 of file btDeformableMultiBodyDynamicsWorld.h.
◆ reinitialize()
Definition at line 452 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ removeCollisionObject()
|
virtual |
removeCollisionObject will first check if it is a rigid body, if so call removeRigidBody otherwise call btCollisionWorld::removeCollisionObject
Reimplemented from btDiscreteDynamicsWorld.
Definition at line 670 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ removeForce()
| void btDeformableMultiBodyDynamicsWorld::removeForce | ( | btSoftBody * | psb, |
| btDeformableLagrangianForce * | force | ||
| ) |
Definition at line 634 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ removeSoftBody()
| void btDeformableMultiBodyDynamicsWorld::removeSoftBody | ( | btSoftBody * | body | ) |
Definition at line 661 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ removeSoftBodyForce()
| void btDeformableMultiBodyDynamicsWorld::removeSoftBodyForce | ( | btSoftBody * | psb | ) |
Definition at line 652 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ setDrawFlags()
Definition at line 145 of file btDeformableMultiBodyDynamicsWorld.h.
◆ setGravity()
Reimplemented from btDiscreteDynamicsWorld.
Definition at line 446 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ setImplicit()
Definition at line 159 of file btDeformableMultiBodyDynamicsWorld.h.
◆ setLineSearch()
Definition at line 164 of file btDeformableMultiBodyDynamicsWorld.h.
◆ setSolverCallback()
|
inline |
Definition at line 78 of file btDeformableMultiBodyDynamicsWorld.h.
◆ setupConstraints()
| void btDeformableMultiBodyDynamicsWorld::setupConstraints | ( | ) |
Definition at line 332 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ setUseProjection()
Definition at line 169 of file btDeformableMultiBodyDynamicsWorld.h.
◆ softBodySelfCollision()
| void btDeformableMultiBodyDynamicsWorld::softBodySelfCollision | ( | ) |
Definition at line 261 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ solveConstraints()
Definition at line 304 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ solveContactConstraints()
| void btDeformableMultiBodyDynamicsWorld::solveContactConstraints | ( | ) |
Definition at line 368 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ solveMultiBodyConstraints()
| void btDeformableMultiBodyDynamicsWorld::solveMultiBodyConstraints | ( | ) |
◆ sortConstraints()
| void btDeformableMultiBodyDynamicsWorld::sortConstraints | ( | ) |
Definition at line 350 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ stepSimulation()
|
virtual |
if maxSubSteps > 0, it will interpolate motion between fixedTimeStep's
Reimplemented from btDiscreteDynamicsWorld.
Definition at line 679 of file btDeformableMultiBodyDynamicsWorld.cpp.
◆ updateActivationState()
|
protectedvirtual |
Reimplemented from btMultiBodyDynamicsWorld.
Definition at line 139 of file btDeformableMultiBodyDynamicsWorld.cpp.
Member Data Documentation
◆ m_ccdIterations
|
private |
Definition at line 49 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_deformableBodySolver
|
private |
Solver classes that encapsulate multiple deformable bodies for solving.
Definition at line 41 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_drawClusterTree
|
private |
Definition at line 46 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_drawFaceTree
|
private |
Definition at line 45 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_drawFlags
|
private |
Definition at line 43 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_drawNodeTree
|
private |
Definition at line 44 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_implicit
|
private |
Definition at line 50 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_internalTime
|
private |
Definition at line 48 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_lineSearch
|
private |
Definition at line 51 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_sbi
|
private |
Definition at line 47 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_softBodies
|
private |
Definition at line 42 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_solverCallback
|
private |
Definition at line 56 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_solverDeformableBodyIslandCallback
|
private |
Definition at line 53 of file btDeformableMultiBodyDynamicsWorld.h.
◆ m_useProjection
|
private |
Definition at line 52 of file btDeformableMultiBodyDynamicsWorld.h.
The documentation for this class was generated from the following files: