#include <btDeformableLagrangianForce.h>
Public Types | |
| typedef btAlignedObjectArray< btVector3 > | TVStack |
Public Attributes | |
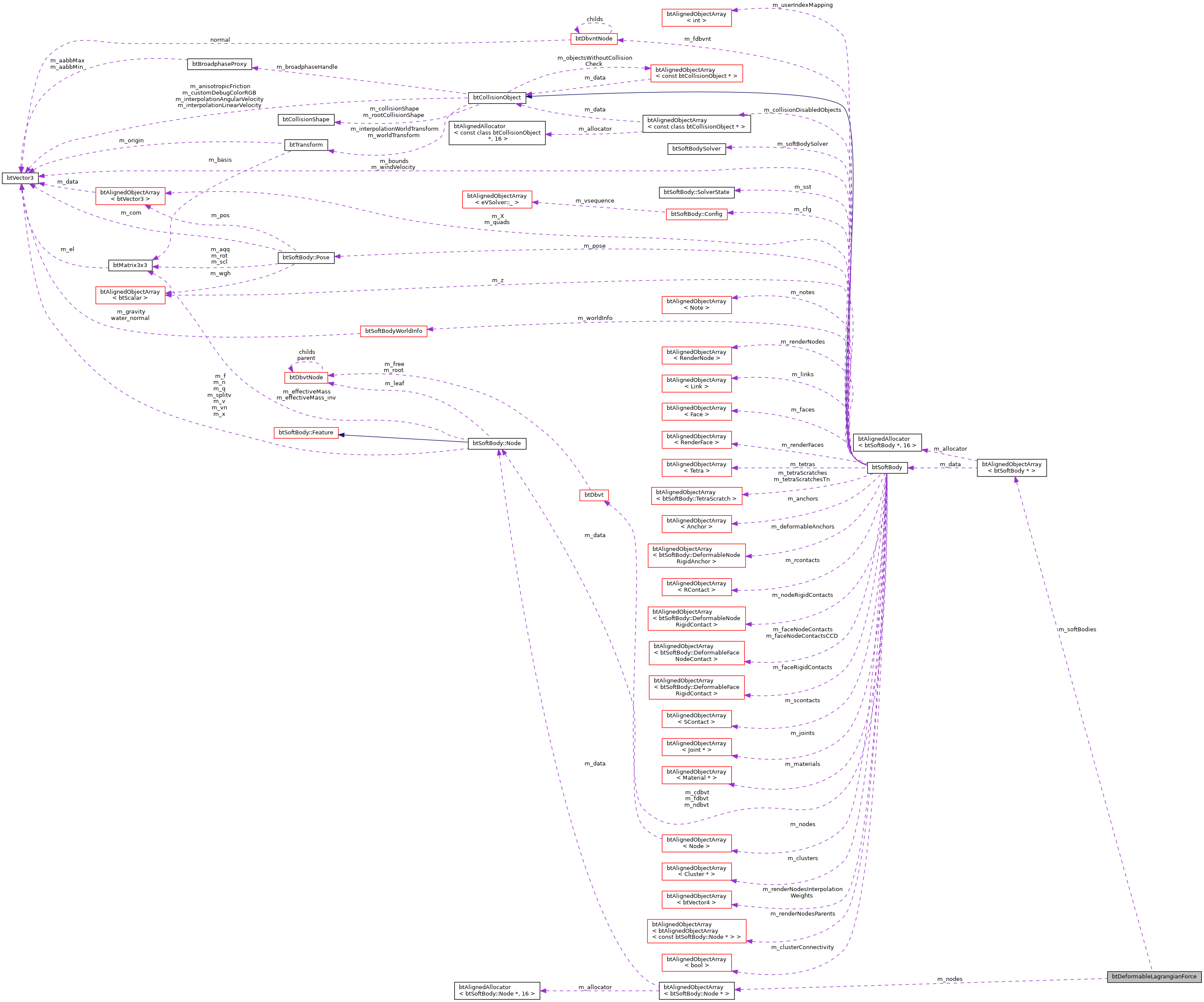
| btAlignedObjectArray< btSoftBody * > | m_softBodies |
| const btAlignedObjectArray< btSoftBody::Node * > * | m_nodes |
Detailed Description
Definition at line 38 of file btDeformableLagrangianForce.h.
Member Typedef Documentation
◆ TVStack
Definition at line 41 of file btDeformableLagrangianForce.h.
Constructor & Destructor Documentation
◆ btDeformableLagrangianForce()
|
inline |
Definition at line 45 of file btDeformableLagrangianForce.h.
◆ ~btDeformableLagrangianForce()
|
inlinevirtual |
Definition at line 49 of file btDeformableLagrangianForce.h.
Member Function Documentation
◆ addScaledDampingForce()
◆ addScaledDampingForceDifferential()
◆ addScaledElasticForceDifferential()
◆ addScaledExplicitForce()
◆ addScaledForces()
◆ addScaledHessian()
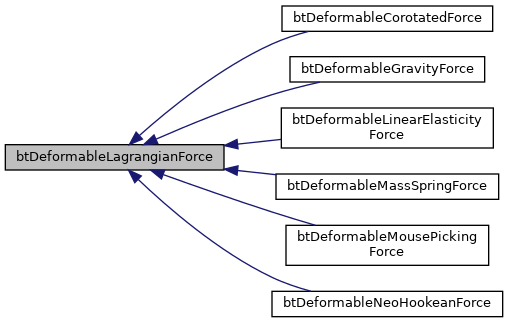
Reimplemented in btDeformableLinearElasticityForce.
Definition at line 69 of file btDeformableLagrangianForce.h.
◆ addSoftBody()
|
inlinevirtual |
Definition at line 89 of file btDeformableLagrangianForce.h.
◆ buildDampingForceDifferentialDiagonal()
◆ Ds()
|
inlinevirtual |
Definition at line 105 of file btDeformableLagrangianForce.h.
◆ DsFromVelocity()
|
inlinevirtual |
Definition at line 114 of file btDeformableLagrangianForce.h.
◆ getForceType()
|
pure virtual |
◆ getNumNodes()
Definition at line 78 of file btDeformableLagrangianForce.h.
◆ reinitialize()
Definition at line 73 of file btDeformableLagrangianForce.h.
◆ removeSoftBody()
|
inlinevirtual |
Definition at line 94 of file btDeformableLagrangianForce.h.
◆ setIndices()
|
inlinevirtual |
Definition at line 99 of file btDeformableLagrangianForce.h.
◆ testDerivative()
Definition at line 123 of file btDeformableLagrangianForce.h.
◆ testHessian()
Definition at line 233 of file btDeformableLagrangianForce.h.
◆ totalDampingEnergy()
Reimplemented in btDeformableLinearElasticityForce, btDeformableMassSpringForce, btDeformableMousePickingForce, and btDeformableNeoHookeanForce.
Definition at line 361 of file btDeformableLagrangianForce.h.
◆ totalElasticEnergy()
Reimplemented in btDeformableLinearElasticityForce, btDeformableMassSpringForce, btDeformableMousePickingForce, and btDeformableNeoHookeanForce.
Definition at line 355 of file btDeformableLagrangianForce.h.
◆ totalEnergy()
Reimplemented in btDeformableGravityForce.
Definition at line 367 of file btDeformableLagrangianForce.h.
Member Data Documentation
◆ m_nodes
| const btAlignedObjectArray<btSoftBody::Node*>* btDeformableLagrangianForce::m_nodes |
Definition at line 43 of file btDeformableLagrangianForce.h.
◆ m_softBodies
| btAlignedObjectArray<btSoftBody*> btDeformableLagrangianForce::m_softBodies |
Definition at line 42 of file btDeformableLagrangianForce.h.
The documentation for this class was generated from the following file: