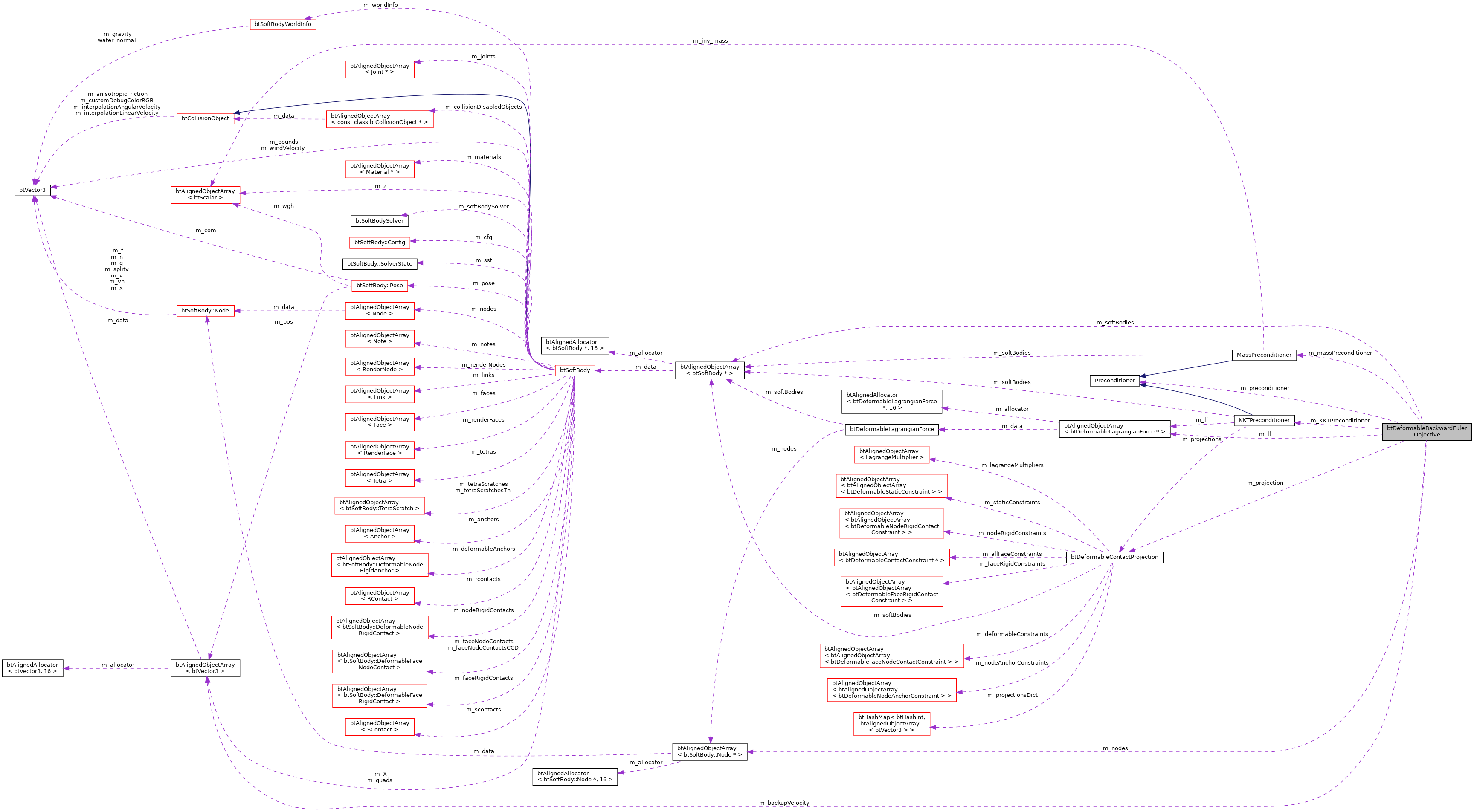
#include <btDeformableBackwardEulerObjective.h>
Public Types | |
| enum | _ { Mass_preconditioner , KKT_preconditioner } |
| typedef btAlignedObjectArray< btVector3 > | TVStack |
Detailed Description
Definition at line 31 of file btDeformableBackwardEulerObjective.h.
Member Typedef Documentation
◆ TVStack
Definition at line 40 of file btDeformableBackwardEulerObjective.h.
Member Enumeration Documentation
◆ _
| Enumerator | |
|---|---|
| Mass_preconditioner | |
| KKT_preconditioner | |
Definition at line 34 of file btDeformableBackwardEulerObjective.h.
Constructor & Destructor Documentation
◆ btDeformableBackwardEulerObjective()
| btDeformableBackwardEulerObjective::btDeformableBackwardEulerObjective | ( | btAlignedObjectArray< btSoftBody * > & | softBodies, |
| const TVStack & | backup_v | ||
| ) |
Definition at line 20 of file btDeformableBackwardEulerObjective.cpp.
◆ ~btDeformableBackwardEulerObjective()
|
virtual |
Definition at line 28 of file btDeformableBackwardEulerObjective.cpp.
Member Function Documentation
◆ addLagrangeMultiplier()
|
inline |
Definition at line 142 of file btDeformableBackwardEulerObjective.h.
◆ addLagrangeMultiplierRHS()
|
inline |
Definition at line 156 of file btDeformableBackwardEulerObjective.h.
◆ applyDynamicFriction()
Definition at line 296 of file btDeformableBackwardEulerObjective.cpp.
◆ applyExplicitForce()
Definition at line 213 of file btDeformableBackwardEulerObjective.cpp.
◆ applyForce()
Definition at line 137 of file btDeformableBackwardEulerObjective.cpp.
◆ calculateContactForce()
|
inline |
Definition at line 178 of file btDeformableBackwardEulerObjective.h.
◆ computeNorm()
Definition at line 193 of file btDeformableBackwardEulerObjective.cpp.
◆ computeResidual()
Definition at line 174 of file btDeformableBackwardEulerObjective.cpp.
◆ computeStep()
| void btDeformableBackwardEulerObjective::computeStep | ( | TVStack & | dv, |
| const TVStack & | residual, | ||
| const btScalar & | dt | ||
| ) |
◆ getIndices()
|
inline |
Definition at line 129 of file btDeformableBackwardEulerObjective.h.
◆ initialGuess()
Definition at line 276 of file btDeformableBackwardEulerObjective.cpp.
◆ initialize()
|
inline |
Definition at line 56 of file btDeformableBackwardEulerObjective.h.
◆ multiply()
Definition at line 69 of file btDeformableBackwardEulerObjective.cpp.
◆ precondition()
Definition at line 101 of file btDeformableBackwardEulerObjective.h.
◆ project()
Definition at line 94 of file btDeformableBackwardEulerObjective.h.
◆ reinitialize()
Definition at line 34 of file btDeformableBackwardEulerObjective.cpp.
◆ setConstraints()
| void btDeformableBackwardEulerObjective::setConstraints | ( | const btContactSolverInfo & | infoGlobal | ) |
Definition at line 291 of file btDeformableBackwardEulerObjective.cpp.
◆ setDt()
Definition at line 64 of file btDeformableBackwardEulerObjective.cpp.
◆ setImplicit()
Definition at line 134 of file btDeformableBackwardEulerObjective.h.
◆ totalEnergy()
Definition at line 203 of file btDeformableBackwardEulerObjective.cpp.
◆ updateId()
Definition at line 107 of file btDeformableBackwardEulerObjective.h.
◆ updateVelocity()
Definition at line 124 of file btDeformableBackwardEulerObjective.cpp.
Member Data Documentation
◆ m_backupVelocity
Definition at line 46 of file btDeformableBackwardEulerObjective.h.
◆ m_dt
| btScalar btDeformableBackwardEulerObjective::m_dt |
Definition at line 41 of file btDeformableBackwardEulerObjective.h.
◆ m_implicit
| bool btDeformableBackwardEulerObjective::m_implicit |
Definition at line 48 of file btDeformableBackwardEulerObjective.h.
◆ m_KKTPreconditioner
| KKTPreconditioner* btDeformableBackwardEulerObjective::m_KKTPreconditioner |
Definition at line 50 of file btDeformableBackwardEulerObjective.h.
◆ m_lf
| btAlignedObjectArray<btDeformableLagrangianForce*> btDeformableBackwardEulerObjective::m_lf |
Definition at line 42 of file btDeformableBackwardEulerObjective.h.
◆ m_massPreconditioner
| MassPreconditioner* btDeformableBackwardEulerObjective::m_massPreconditioner |
Definition at line 49 of file btDeformableBackwardEulerObjective.h.
◆ m_nodes
| btAlignedObjectArray<btSoftBody::Node*> btDeformableBackwardEulerObjective::m_nodes |
Definition at line 47 of file btDeformableBackwardEulerObjective.h.
◆ m_preconditioner
| Preconditioner* btDeformableBackwardEulerObjective::m_preconditioner |
Definition at line 44 of file btDeformableBackwardEulerObjective.h.
◆ m_projection
| btDeformableContactProjection btDeformableBackwardEulerObjective::m_projection |
Definition at line 45 of file btDeformableBackwardEulerObjective.h.
◆ m_softBodies
| btAlignedObjectArray<btSoftBody*>& btDeformableBackwardEulerObjective::m_softBodies |
Definition at line 43 of file btDeformableBackwardEulerObjective.h.
The documentation for this class was generated from the following files: