btCollisionConfiguration allows to configure Bullet collision detection stack allocator, pool memory allocators More...
#include <btDefaultCollisionConfiguration.h>
 Public Member Functions inherited from
Public Member Functions inherited from Detailed Description
btCollisionConfiguration allows to configure Bullet collision detection stack allocator, pool memory allocators
Definition at line 46 of file btDefaultCollisionConfiguration.h.
Constructor & Destructor Documentation
◆ btDefaultCollisionConfiguration()
| btDefaultCollisionConfiguration::btDefaultCollisionConfiguration | ( | const btDefaultCollisionConstructionInfo & | constructionInfo = btDefaultCollisionConstructionInfo() | ) |
calculate maximum element size, big enough to fit any collision algorithm in the memory pool
Definition at line 37 of file btDefaultCollisionConfiguration.cpp.
◆ ~btDefaultCollisionConfiguration()
|
virtual |
Definition at line 133 of file btDefaultCollisionConfiguration.cpp.
Member Function Documentation
◆ getClosestPointsAlgorithmCreateFunc()
|
virtual |
Implements btCollisionConfiguration.
Definition at line 193 of file btDefaultCollisionConfiguration.cpp.
◆ getCollisionAlgorithmCreateFunc()
|
virtual |
Implements btCollisionConfiguration.
Reimplemented in btSoftBodyRigidBodyCollisionConfiguration.
Definition at line 267 of file btDefaultCollisionConfiguration.cpp.
◆ getCollisionAlgorithmPool()
|
inlinevirtual |
Implements btCollisionConfiguration.
Definition at line 90 of file btDefaultCollisionConfiguration.h.
◆ getPersistentManifoldPool()
|
inlinevirtual |
memory pools
Implements btCollisionConfiguration.
Definition at line 85 of file btDefaultCollisionConfiguration.h.
◆ setConvexConvexMultipointIterations()
| void btDefaultCollisionConfiguration::setConvexConvexMultipointIterations | ( | int | numPerturbationIterations = 3, |
| int | minimumPointsPerturbationThreshold = 3 |
||
| ) |
Use this method to allow to generate multiple contact points between at once, between two objects using the generic convex-convex algorithm.
By default, this feature is disabled for best performance.
- Parameters
-
numPerturbationIterations controls the number of collision queries. Set it to zero to disable the feature. minimumPointsPerturbationThreshold is the minimum number of points in the contact cache, above which the feature is disabled 3 is a good value for both params, if you want to enable the feature. This is because the default contact cache contains a maximum of 4 points, and one collision query at the unperturbed orientation is performed first. See Bullet/Demos/CollisionDemo for an example how this feature gathers multiple points.
Definition at line 346 of file btDefaultCollisionConfiguration.cpp.
◆ setPlaneConvexMultipointIterations()
| void btDefaultCollisionConfiguration::setPlaneConvexMultipointIterations | ( | int | numPerturbationIterations = 3, |
| int | minimumPointsPerturbationThreshold = 3 |
||
| ) |
Definition at line 353 of file btDefaultCollisionConfiguration.cpp.
Member Data Documentation
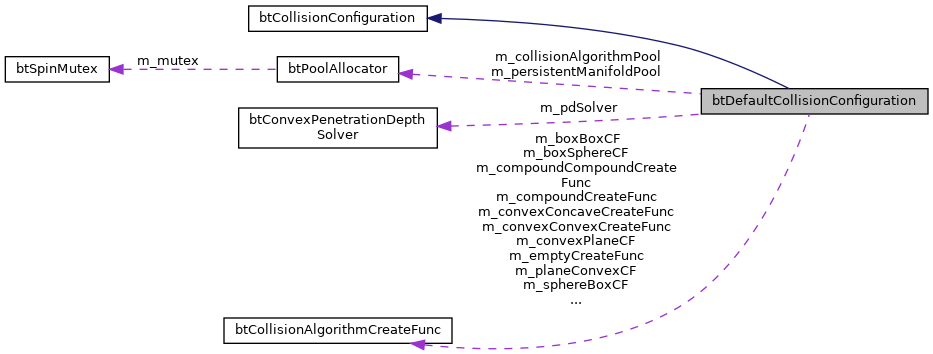
◆ m_boxBoxCF
|
protected |
Definition at line 73 of file btDefaultCollisionConfiguration.h.
◆ m_boxSphereCF
|
protected |
Definition at line 71 of file btDefaultCollisionConfiguration.h.
◆ m_collisionAlgorithmPool
|
protected |
Definition at line 54 of file btDefaultCollisionConfiguration.h.
◆ m_compoundCompoundCreateFunc
|
protected |
Definition at line 65 of file btDefaultCollisionConfiguration.h.
◆ m_compoundCreateFunc
|
protected |
Definition at line 64 of file btDefaultCollisionConfiguration.h.
◆ m_convexConcaveCreateFunc
|
protected |
Definition at line 62 of file btDefaultCollisionConfiguration.h.
◆ m_convexConvexCreateFunc
|
protected |
Definition at line 61 of file btDefaultCollisionConfiguration.h.
◆ m_convexPlaneCF
|
protected |
Definition at line 77 of file btDefaultCollisionConfiguration.h.
◆ m_emptyCreateFunc
|
protected |
Definition at line 68 of file btDefaultCollisionConfiguration.h.
◆ m_ownsCollisionAlgorithmPool
|
protected |
Definition at line 55 of file btDefaultCollisionConfiguration.h.
◆ m_ownsPersistentManifoldPool
|
protected |
Definition at line 52 of file btDefaultCollisionConfiguration.h.
◆ m_pdSolver
|
protected |
Definition at line 58 of file btDefaultCollisionConfiguration.h.
◆ m_persistentManifoldPool
|
protected |
Definition at line 51 of file btDefaultCollisionConfiguration.h.
◆ m_persistentManifoldPoolSize
|
protected |
Definition at line 49 of file btDefaultCollisionConfiguration.h.
◆ m_planeConvexCF
|
protected |
Definition at line 76 of file btDefaultCollisionConfiguration.h.
◆ m_sphereBoxCF
|
protected |
Definition at line 70 of file btDefaultCollisionConfiguration.h.
◆ m_sphereSphereCF
|
protected |
Definition at line 69 of file btDefaultCollisionConfiguration.h.
◆ m_sphereTriangleCF
|
protected |
Definition at line 74 of file btDefaultCollisionConfiguration.h.
◆ m_swappedCompoundCreateFunc
|
protected |
Definition at line 67 of file btDefaultCollisionConfiguration.h.
◆ m_swappedConvexConcaveCreateFunc
|
protected |
Definition at line 63 of file btDefaultCollisionConfiguration.h.
◆ m_triangleSphereCF
|
protected |
Definition at line 75 of file btDefaultCollisionConfiguration.h.
The documentation for this class was generated from the following files: