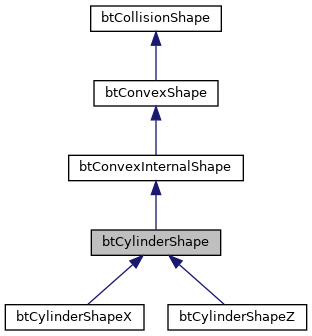
The btCylinderShape class implements a cylinder shape primitive, centered around the origin. Its central axis aligned with the Y axis. btCylinderShapeX is aligned with the X axis and btCylinderShapeZ around the Z axis. More...
#include <btCylinderShape.h>
Protected Attributes | |
| int | m_upAxis |
 Protected Attributes inherited from btConvexInternalShape Protected Attributes inherited from btConvexInternalShape | |
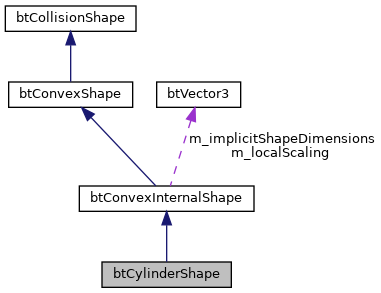
| btVector3 | m_localScaling |
| btVector3 | m_implicitShapeDimensions |
| btScalar | m_collisionMargin |
| btScalar | m_padding |
| Protected Attributes inherited from btCollisionShape | |
| int | m_shapeType |
| void * | m_userPointer |
| int | m_userIndex |
| int | m_userIndex2 |
Additional Inherited Members | |
| Protected Member Functions inherited from btConvexInternalShape | |
| btConvexInternalShape () | |
Detailed Description
The btCylinderShape class implements a cylinder shape primitive, centered around the origin. Its central axis aligned with the Y axis. btCylinderShapeX is aligned with the X axis and btCylinderShapeZ around the Z axis.
Definition at line 24 of file btCylinderShape.h.
Constructor & Destructor Documentation
◆ btCylinderShape()
Definition at line 18 of file btCylinderShape.cpp.
Member Function Documentation
◆ batchedUnitVectorGetSupportingVertexWithoutMargin()
|
virtual |
Implements btConvexShape.
Reimplemented in btCylinderShapeX, and btCylinderShapeZ.
Definition at line 231 of file btCylinderShape.cpp.
◆ BT_DECLARE_ALIGNED_ALLOCATOR()
| btCylinderShape::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
◆ calculateLocalInertia()
Implements btCollisionShape.
Definition at line 47 of file btCylinderShape.cpp.
◆ calculateSerializeBufferSize()
|
inlinevirtual |
Reimplemented from btConvexInternalShape.
Definition at line 183 of file btCylinderShape.h.
◆ getAabb()
|
virtual |
getAabb's default implementation is brute force, expected derived classes to implement a fast dedicated version
Reimplemented from btConvexInternalShape.
Definition at line 42 of file btCylinderShape.cpp.
◆ getAnisotropicRollingFrictionDirection()
the getAnisotropicRollingFrictionDirection can be used in combination with setAnisotropicFriction See Bullet/Demos/RollingFrictionDemo for an example
Reimplemented from btCollisionShape.
Definition at line 94 of file btCylinderShape.h.
◆ getHalfExtentsWithMargin()
|
inline |
Definition at line 34 of file btCylinderShape.h.
◆ getHalfExtentsWithoutMargin()
Definition at line 42 of file btCylinderShape.h.
◆ getName()
Implements btCollisionShape.
Reimplemented in btCylinderShapeX, and btCylinderShapeZ.
Definition at line 118 of file btCylinderShape.h.
◆ getRadius()
Reimplemented in btCylinderShapeX, and btCylinderShapeZ.
Definition at line 101 of file btCylinderShape.h.
◆ getUpAxis()
|
inline |
Definition at line 89 of file btCylinderShape.h.
◆ localGetSupportingVertex()
|
inlinevirtual |
Reimplemented from btConvexInternalShape.
Definition at line 68 of file btCylinderShape.h.
◆ localGetSupportingVertexWithoutMargin()
|
virtual |
Implements btConvexShape.
Reimplemented in btCylinderShapeX, and btCylinderShapeZ.
Definition at line 226 of file btCylinderShape.cpp.
◆ serialize()
|
inlinevirtual |
fills the dataBuffer and returns the struct name (and 0 on failure)
Reimplemented from btConvexInternalShape.
Definition at line 189 of file btCylinderShape.h.
◆ setLocalScaling()
Reimplemented from btConvexInternalShape.
Definition at line 106 of file btCylinderShape.h.
◆ setMargin()
Reimplemented from btConvexInternalShape.
Definition at line 57 of file btCylinderShape.h.
Member Data Documentation
◆ m_upAxis
|
protected |
Definition at line 29 of file btCylinderShape.h.
The documentation for this class was generated from the following files: