The btConvexPointCloudShape implements an implicit convex hull of an array of vertices. More...
#include <btConvexPointCloudShape.h>
Private Attributes | |
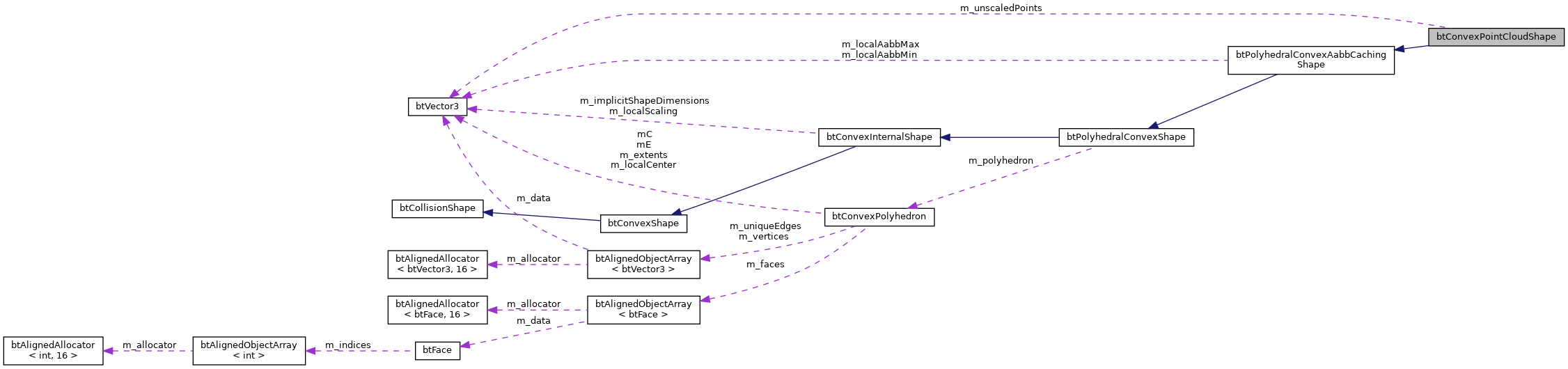
| btVector3 * | m_unscaledPoints |
| int | m_numPoints |
Additional Inherited Members | |
 Protected Member Functions inherited from btPolyhedralConvexAabbCachingShape Protected Member Functions inherited from btPolyhedralConvexAabbCachingShape | |
| void | setCachedLocalAabb (const btVector3 &aabbMin, const btVector3 &aabbMax) |
| void | getCachedLocalAabb (btVector3 &aabbMin, btVector3 &aabbMax) const |
| btPolyhedralConvexAabbCachingShape () | |
| Protected Member Functions inherited from btConvexInternalShape | |
| btConvexInternalShape () | |
| Protected Attributes inherited from btPolyhedralConvexShape | |
| btConvexPolyhedron * | m_polyhedron |
| Protected Attributes inherited from btConvexInternalShape | |
| btVector3 | m_localScaling |
| btVector3 | m_implicitShapeDimensions |
| btScalar | m_collisionMargin |
| btScalar | m_padding |
| Protected Attributes inherited from btCollisionShape | |
| int | m_shapeType |
| void * | m_userPointer |
| int | m_userIndex |
| int | m_userIndex2 |
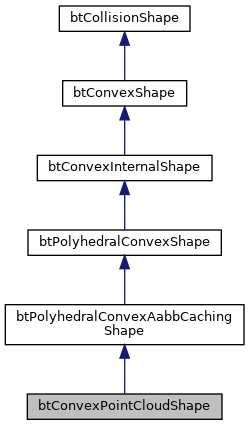
Detailed Description
The btConvexPointCloudShape implements an implicit convex hull of an array of vertices.
Definition at line 24 of file btConvexPointCloudShape.h.
Constructor & Destructor Documentation
◆ btConvexPointCloudShape() [1/2]
|
inline |
Definition at line 33 of file btConvexPointCloudShape.h.
◆ btConvexPointCloudShape() [2/2]
|
inline |
Definition at line 41 of file btConvexPointCloudShape.h.
Member Function Documentation
◆ batchedUnitVectorGetSupportingVertexWithoutMargin()
|
virtual |
Reimplemented from btPolyhedralConvexShape.
Definition at line 56 of file btConvexPointCloudShape.cpp.
◆ BT_DECLARE_ALIGNED_ALLOCATOR()
| btConvexPointCloudShape::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
◆ getEdge()
Implements btPolyhedralConvexShape.
Definition at line 104 of file btConvexPointCloudShape.cpp.
◆ getName()
Implements btCollisionShape.
Definition at line 89 of file btConvexPointCloudShape.h.
◆ getNumEdges()
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 99 of file btConvexPointCloudShape.cpp.
◆ getNumPlanes()
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 114 of file btConvexPointCloudShape.cpp.
◆ getNumPoints()
|
inline |
Definition at line 72 of file btConvexPointCloudShape.h.
◆ getNumVertices()
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 94 of file btConvexPointCloudShape.cpp.
◆ getPlane()
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 119 of file btConvexPointCloudShape.cpp.
◆ getScaledPoint()
Definition at line 77 of file btConvexPointCloudShape.h.
◆ getUnscaledPoints() [1/2]
|
inline |
Definition at line 62 of file btConvexPointCloudShape.h.
◆ getUnscaledPoints() [2/2]
Definition at line 67 of file btConvexPointCloudShape.h.
◆ getVertex()
Implements btPolyhedralConvexShape.
Definition at line 109 of file btConvexPointCloudShape.cpp.
◆ isInside()
Implements btPolyhedralConvexShape.
Definition at line 125 of file btConvexPointCloudShape.cpp.
◆ localGetSupportingVertex()
Reimplemented from btConvexInternalShape.
Definition at line 73 of file btConvexPointCloudShape.cpp.
◆ localGetSupportingVertexWithoutMargin()
|
virtual |
Reimplemented from btPolyhedralConvexShape.
Definition at line 28 of file btConvexPointCloudShape.cpp.
◆ setLocalScaling()
in case we receive negative scaling
Reimplemented from btPolyhedralConvexAabbCachingShape.
Definition at line 21 of file btConvexPointCloudShape.cpp.
◆ setPoints()
|
inline |
Definition at line 52 of file btConvexPointCloudShape.h.
Member Data Documentation
◆ m_numPoints
|
private |
Definition at line 28 of file btConvexPointCloudShape.h.
◆ m_unscaledPoints
|
private |
Definition at line 27 of file btConvexPointCloudShape.h.
The documentation for this class was generated from the following files: