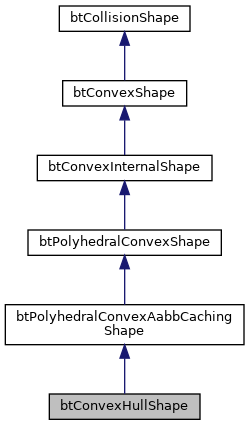
The btConvexHullShape implements an implicit convex hull of an array of vertices. More...
#include <btConvexHullShape.h>
Protected Attributes | |
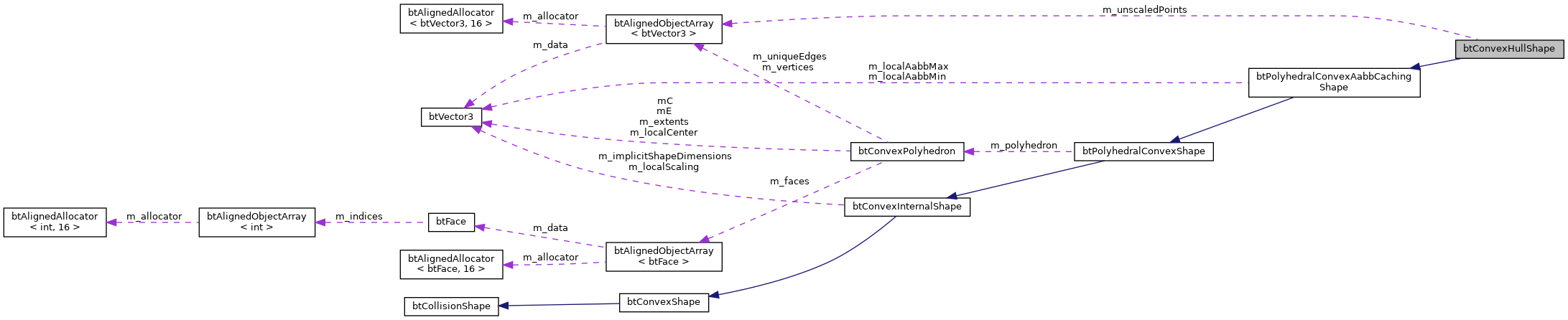
| btAlignedObjectArray< btVector3 > | m_unscaledPoints |
 Protected Attributes inherited from btPolyhedralConvexShape Protected Attributes inherited from btPolyhedralConvexShape | |
| btConvexPolyhedron * | m_polyhedron |
| Protected Attributes inherited from btConvexInternalShape | |
| btVector3 | m_localScaling |
| btVector3 | m_implicitShapeDimensions |
| btScalar | m_collisionMargin |
| btScalar | m_padding |
| Protected Attributes inherited from btCollisionShape | |
| int | m_shapeType |
| void * | m_userPointer |
| int | m_userIndex |
| int | m_userIndex2 |
Additional Inherited Members | |
| Protected Member Functions inherited from btPolyhedralConvexAabbCachingShape | |
| void | setCachedLocalAabb (const btVector3 &aabbMin, const btVector3 &aabbMax) |
| void | getCachedLocalAabb (btVector3 &aabbMin, btVector3 &aabbMax) const |
| btPolyhedralConvexAabbCachingShape () | |
| Protected Member Functions inherited from btConvexInternalShape | |
| btConvexInternalShape () | |
Detailed Description
The btConvexHullShape implements an implicit convex hull of an array of vertices.
Bullet provides a general and fast collision detector for convex shapes based on GJK and EPA using localGetSupportingVertex.
Definition at line 25 of file btConvexHullShape.h.
Constructor & Destructor Documentation
◆ btConvexHullShape()
| btConvexHullShape::btConvexHullShape | ( | const btScalar * | points = 0, |
| int | numPoints = 0, |
||
| int | stride = sizeof(btVector3) |
||
| ) |
this constructor optionally takes in a pointer to points.
Each point is assumed to be 3 consecutive btScalar (x,y,z), the striding defines the number of bytes between each point, in memory. It is easier to not pass any points in the constructor, and just add one point at a time, using addPoint. btConvexHullShape make an internal copy of the points.
Definition at line 28 of file btConvexHullShape.cpp.
Member Function Documentation
◆ addPoint()
Definition at line 51 of file btConvexHullShape.cpp.
◆ batchedUnitVectorGetSupportingVertexWithoutMargin()
|
virtual |
Reimplemented from btPolyhedralConvexShape.
Definition at line 74 of file btConvexHullShape.cpp.
◆ BT_DECLARE_ALIGNED_ALLOCATOR()
| btConvexHullShape::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
◆ calculateSerializeBufferSize()
|
inlinevirtual |
Reimplemented from btConvexInternalShape.
Definition at line 112 of file btConvexHullShape.h.
◆ getEdge()
Implements btPolyhedralConvexShape.
Definition at line 140 of file btConvexHullShape.cpp.
◆ getName()
Implements btCollisionShape.
Definition at line 76 of file btConvexHullShape.h.
◆ getNumEdges()
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 135 of file btConvexHullShape.cpp.
◆ getNumPlanes()
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 153 of file btConvexHullShape.cpp.
◆ getNumPoints()
|
inline |
Definition at line 64 of file btConvexHullShape.h.
◆ getNumVertices()
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 130 of file btConvexHullShape.cpp.
◆ getPlane()
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 158 of file btConvexHullShape.cpp.
◆ getPoints()
getPoints is obsolete, please use getUnscaledPoints
Definition at line 52 of file btConvexHullShape.h.
◆ getScaledPoint()
Definition at line 59 of file btConvexHullShape.h.
◆ getUnscaledPoints() [1/2]
|
inline |
Definition at line 41 of file btConvexHullShape.h.
◆ getUnscaledPoints() [2/2]
Definition at line 46 of file btConvexHullShape.h.
◆ getVertex()
Implements btPolyhedralConvexShape.
Definition at line 148 of file btConvexHullShape.cpp.
◆ isInside()
Implements btPolyhedralConvexShape.
Definition at line 164 of file btConvexHullShape.cpp.
◆ localGetSupportingVertex()
Reimplemented from btConvexInternalShape.
Definition at line 99 of file btConvexHullShape.cpp.
◆ localGetSupportingVertexWithoutMargin()
|
virtual |
Reimplemented from btPolyhedralConvexShape.
Definition at line 58 of file btConvexHullShape.cpp.
◆ optimizeConvexHull()
| void btConvexHullShape::optimizeConvexHull | ( | ) |
Definition at line 116 of file btConvexHullShape.cpp.
◆ project()
|
virtual |
Reimplemented from btConvexShape.
Definition at line 207 of file btConvexHullShape.cpp.
◆ serialize()
|
virtual |
fills the dataBuffer and returns the struct name (and 0 on failure)
Reimplemented from btConvexInternalShape.
Definition at line 171 of file btConvexHullShape.cpp.
◆ setLocalScaling()
in case we receive negative scaling
Reimplemented from btPolyhedralConvexAabbCachingShape.
Definition at line 45 of file btConvexHullShape.cpp.
Member Data Documentation
◆ m_unscaledPoints
|
protected |
Definition at line 29 of file btConvexHullShape.h.
The documentation for this class was generated from the following files: