btContactConstraint can be automatically created to solve contact constraints using the unified btTypedConstraint interface More...
#include <btContactConstraint.h>
Protected Member Functions | |
| btContactConstraint (btPersistentManifold *contactManifold, btRigidBody &rbA, btRigidBody &rbB) | |
 Protected Member Functions inherited from btTypedConstraint Protected Member Functions inherited from btTypedConstraint | |
| btScalar | getMotorFactor (btScalar pos, btScalar lowLim, btScalar uppLim, btScalar vel, btScalar timeFact) |
| internal method used by the constraint solver, don't use them directly | |
Protected Attributes | |
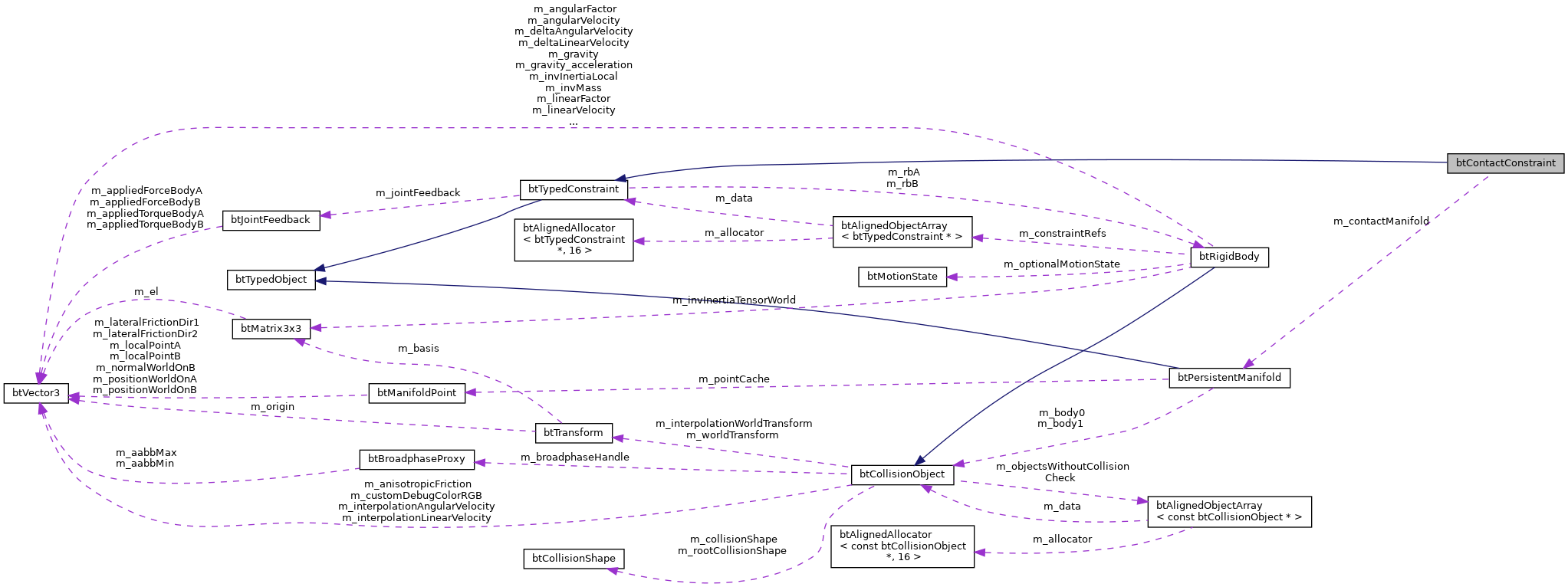
| btPersistentManifold | m_contactManifold |
| Protected Attributes inherited from btTypedConstraint | |
| btRigidBody & | m_rbA |
| btRigidBody & | m_rbB |
| btScalar | m_appliedImpulse |
| btScalar | m_dbgDrawSize |
| btJointFeedback * | m_jointFeedback |
Additional Inherited Members | |
| Static Public Member Functions inherited from btTypedConstraint | |
| static btRigidBody & | getFixedBody () |
| Public Attributes inherited from btTypedObject | |
| int | m_objectType |
Detailed Description
btContactConstraint can be automatically created to solve contact constraints using the unified btTypedConstraint interface
Definition at line 25 of file btContactConstraint.h.
Constructor & Destructor Documentation
◆ btContactConstraint()
|
protected |
Definition at line 24 of file btContactConstraint.cpp.
◆ ~btContactConstraint()
|
virtual |
Definition at line 30 of file btContactConstraint.cpp.
Member Function Documentation
◆ buildJacobian()
|
virtual |
obsolete methods
Reimplemented from btTypedConstraint.
Definition at line 47 of file btContactConstraint.cpp.
◆ getContactManifold() [1/2]
|
inline |
Definition at line 37 of file btContactConstraint.h.
◆ getContactManifold() [2/2]
|
inline |
Definition at line 42 of file btContactConstraint.h.
◆ getInfo1()
|
virtual |
internal method used by the constraint solver, don't use them directly
Implements btTypedConstraint.
Definition at line 39 of file btContactConstraint.cpp.
◆ getInfo2()
|
virtual |
internal method used by the constraint solver, don't use them directly
Implements btTypedConstraint.
Definition at line 43 of file btContactConstraint.cpp.
◆ setContactManifold()
| void btContactConstraint::setContactManifold | ( | btPersistentManifold * | contactManifold | ) |
Definition at line 34 of file btContactConstraint.cpp.
Member Data Documentation
◆ m_contactManifold
|
protected |
Definition at line 29 of file btContactConstraint.h.
The documentation for this class was generated from the following files: