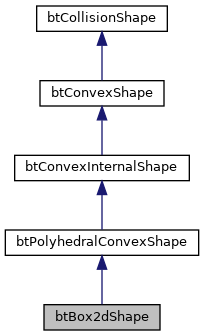
The btBox2dShape is a box primitive around the origin, its sides axis aligned with length specified by half extents, in local shape coordinates. When used as part of a btCollisionObject or btRigidBody it will be an oriented box in world space. More...
#include <btBox2dShape.h>
Private Attributes | |
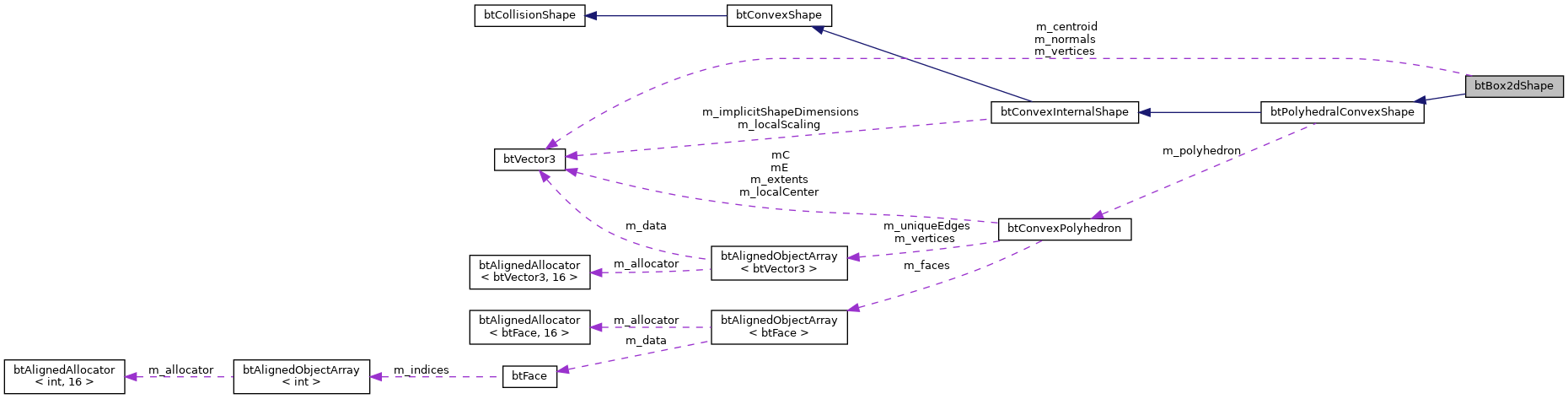
| btVector3 | m_centroid |
| btVector3 | m_vertices [4] |
| btVector3 | m_normals [4] |
Additional Inherited Members | |
 Protected Member Functions inherited from btConvexInternalShape Protected Member Functions inherited from btConvexInternalShape | |
| btConvexInternalShape () | |
| Protected Attributes inherited from btPolyhedralConvexShape | |
| btConvexPolyhedron * | m_polyhedron |
| Protected Attributes inherited from btConvexInternalShape | |
| btVector3 | m_localScaling |
| btVector3 | m_implicitShapeDimensions |
| btScalar | m_collisionMargin |
| btScalar | m_padding |
| Protected Attributes inherited from btCollisionShape | |
| int | m_shapeType |
| void * | m_userPointer |
| int | m_userIndex |
| int | m_userIndex2 |
Detailed Description
The btBox2dShape is a box primitive around the origin, its sides axis aligned with length specified by half extents, in local shape coordinates. When used as part of a btCollisionObject or btRigidBody it will be an oriented box in world space.
Definition at line 26 of file btBox2dShape.h.
Constructor & Destructor Documentation
◆ btBox2dShape()
a btBox2dShape is a flat 2D box in the X-Y plane (Z extents are zero)
Definition at line 85 of file btBox2dShape.h.
Member Function Documentation
◆ batchedUnitVectorGetSupportingVertexWithoutMargin()
|
inlinevirtual |
Reimplemented from btPolyhedralConvexShape.
Definition at line 71 of file btBox2dShape.h.
◆ BT_DECLARE_ALIGNED_ALLOCATOR()
| btBox2dShape::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
◆ calculateLocalInertia()
Reimplemented from btPolyhedralConvexShape.
Definition at line 25 of file btBox2dShape.cpp.
◆ getAabb()
|
virtual |
getAabb's default implementation is brute force, expected derived classes to implement a fast dedicated version
Implements btConvexShape.
Definition at line 20 of file btBox2dShape.cpp.
◆ getCentroid()
Definition at line 164 of file btBox2dShape.h.
◆ getEdge()
Implements btPolyhedralConvexShape.
Definition at line 218 of file btBox2dShape.h.
◆ getHalfExtentsWithMargin()
|
inline |
Definition at line 38 of file btBox2dShape.h.
◆ getHalfExtentsWithoutMargin()
Definition at line 46 of file btBox2dShape.h.
◆ getName()
Implements btCollisionShape.
Definition at line 301 of file btBox2dShape.h.
◆ getNormals()
Definition at line 150 of file btBox2dShape.h.
◆ getNumEdges()
Implements btPolyhedralConvexShape.
Definition at line 174 of file btBox2dShape.h.
◆ getNumPlanes()
Implements btPolyhedralConvexShape.
Definition at line 169 of file btBox2dShape.h.
◆ getNumPreferredPenetrationDirections()
Reimplemented from btConvexInternalShape.
Definition at line 306 of file btBox2dShape.h.
◆ getNumVertices()
Implements btPolyhedralConvexShape.
Definition at line 140 of file btBox2dShape.h.
◆ getPlane()
|
inlinevirtual |
Implements btPolyhedralConvexShape.
Definition at line 155 of file btBox2dShape.h.
◆ getPlaneEquation()
Definition at line 189 of file btBox2dShape.h.
◆ getPreferredPenetrationDirection()
|
inlinevirtual |
Reimplemented from btConvexInternalShape.
Definition at line 311 of file btBox2dShape.h.
◆ getVertex()
Implements btPolyhedralConvexShape.
Definition at line 179 of file btBox2dShape.h.
◆ getVertexCount()
|
inline |
Definition at line 135 of file btBox2dShape.h.
◆ getVertices()
Definition at line 145 of file btBox2dShape.h.
◆ isInside()
|
inlinevirtual |
Implements btPolyhedralConvexShape.
Definition at line 284 of file btBox2dShape.h.
◆ localGetSupportingVertex()
|
inlinevirtual |
Reimplemented from btConvexInternalShape.
Definition at line 51 of file btBox2dShape.h.
◆ localGetSupportingVertexWithoutMargin()
|
inlinevirtual |
Reimplemented from btPolyhedralConvexShape.
Definition at line 62 of file btBox2dShape.h.
◆ setLocalScaling()
Reimplemented from btConvexInternalShape.
Definition at line 120 of file btBox2dShape.h.
◆ setMargin()
Reimplemented from btConvexInternalShape.
Definition at line 110 of file btBox2dShape.h.
Member Data Documentation
◆ m_centroid
|
private |
Definition at line 31 of file btBox2dShape.h.
◆ m_normals
|
private |
Definition at line 33 of file btBox2dShape.h.
◆ m_vertices
|
private |
Definition at line 32 of file btBox2dShape.h.
The documentation for this class was generated from the following files: