#include "btBoxCollision.h"
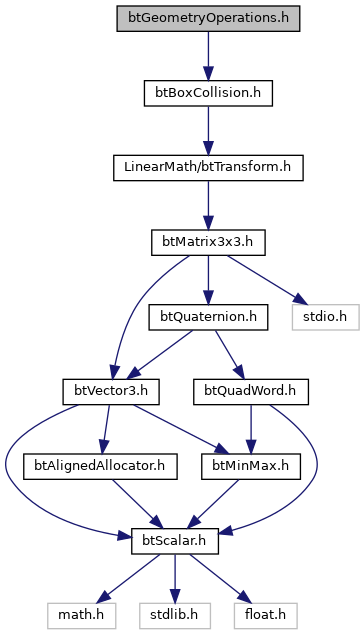
Include dependency graph for btGeometryOperations.h:
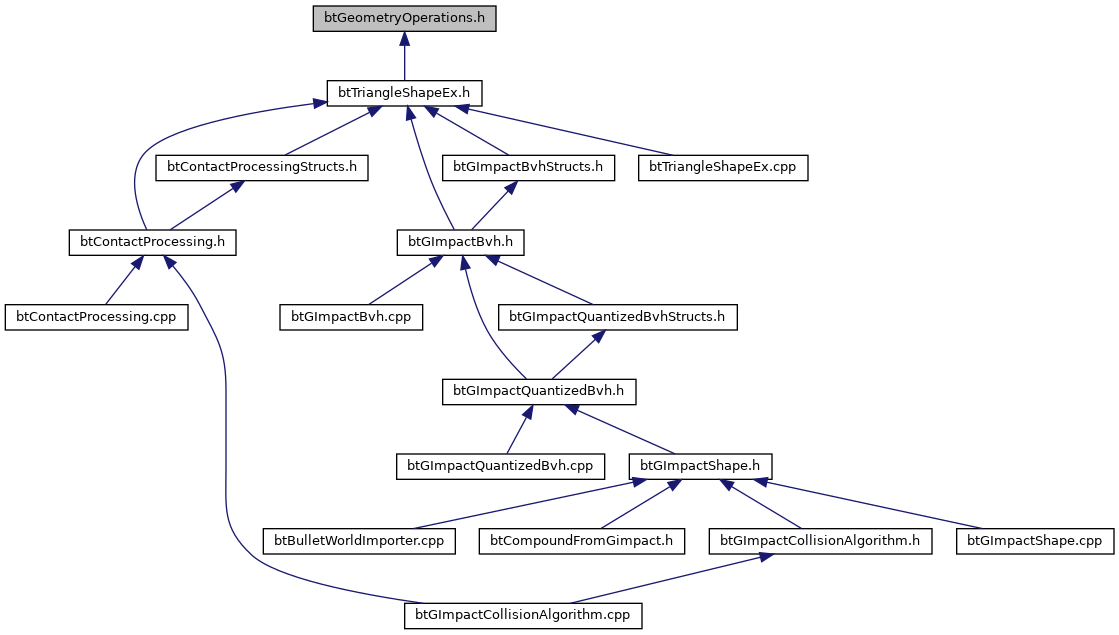
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Macros | |
| #define | PLANEDIREPSILON 0.0000001f |
| #define | PARALELENORMALS 0.000001f |
| #define | BT_CLAMP(number, minval, maxval) (number < minval ? minval : (number > maxval ? maxval : number)) |
Functions | |
| void | bt_edge_plane (const btVector3 &e1, const btVector3 &e2, const btVector3 &normal, btVector4 &plane) |
| Calc a plane from a triangle edge an a normal. plane is a vec4f. | |
| void | bt_closest_point_on_segment (btVector3 &cp, const btVector3 &v, const btVector3 &e1, const btVector3 &e2) |
| int | bt_line_plane_collision (const btVector4 &plane, const btVector3 &vDir, const btVector3 &vPoint, btVector3 &pout, btScalar &tparam, btScalar tmin, btScalar tmax) |
| line plane collision | |
| void | bt_segment_collision (const btVector3 &vA1, const btVector3 &vA2, const btVector3 &vB1, const btVector3 &vB2, btVector3 &vPointA, btVector3 &vPointB) |
| Find closest points on segments. | |
Detailed Description
Definition in file btGeometryOperations.h.
Macro Definition Documentation
◆ BT_CLAMP
| #define BT_CLAMP | ( | number, | |
| minval, | |||
| maxval | |||
| ) | (number < minval ? minval : (number > maxval ? maxval : number)) |
Definition at line 33 of file btGeometryOperations.h.
◆ PARALELENORMALS
| #define PARALELENORMALS 0.000001f |
Definition at line 31 of file btGeometryOperations.h.
◆ PLANEDIREPSILON
| #define PLANEDIREPSILON 0.0000001f |
Definition at line 30 of file btGeometryOperations.h.
Function Documentation
◆ bt_closest_point_on_segment()
|
inline |
Finds the closest point(cp) to (v) on a segment (e1,e2)
Definition at line 47 of file btGeometryOperations.h.
◆ bt_edge_plane()
|
inline |
Calc a plane from a triangle edge an a normal. plane is a vec4f.
Definition at line 36 of file btGeometryOperations.h.
◆ bt_line_plane_collision()
|
inline |
line plane collision
- Returns
- -0 if the ray never intersects -1 if the ray collides in front -2 if the ray collides in back
Definition at line 76 of file btGeometryOperations.h.