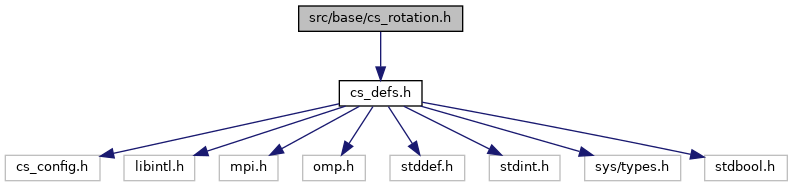
Go to the source code of this file.
|
| void | cs_rotation_define (double omega_x, double omega_y, double omega_z, double invariant_x, double invariant_y, double invariant_z) |
| | Define a global rotation. More...
|
| |
| void | cs_rotation_matrix (double theta, const double axis[3], const double invariant_point[3], double matrix[3][4]) |
| | Compute rotation matrix. More...
|
| |
| void | cs_rotation_update_coords (cs_lnum_t n_coords, double t_rot, cs_real_3_t coords[]) |
| | Update coordinates based on a global rotation and time. More...
|
| |
| static void | cs_rotation_velocity (const cs_rotation_t *r, const cs_real_t coords[3], cs_real_t vr[3]) |
| | Compute velocity relative to a fixed frame at a given point. More...
|
| |
| static void | cs_rotation_add_coriolis_v (const cs_rotation_t *r, cs_real_t c, const cs_real_t v[3], cs_real_t vr[3]) |
| | Add a Coriolis term to a vector. More...
|
| |
| static void | cs_rotation_coriolis_v (const cs_rotation_t *r, cs_real_t c, const cs_real_t v[3], cs_real_t vr[3]) |
| | Compute a vector Coriolis term. More...
|
| |
| static void | cs_rotation_add_coriolis_t (const cs_rotation_t *r, cs_real_t c, cs_real_t tr[3][3]) |
| | Add the dual tensor of a rotation vector to a tensor. More...
|
| |
| static void | cs_rotation_coriolis_t (const cs_rotation_t *r, cs_real_t c, cs_real_t tr[3][3]) |
| | Compute the dual tensor of a rotation vector. More...
|
| |
| void | cs_rotation_cyl_v (const cs_rotation_t *r, const cs_real_t coords[3], const cs_real_t v[3], cs_real_t vc[3]) |
| | Express a vector in the cyclindrical system associated to a rotation. More...
|
| |
| void | cs_rotation_to_array (int r_num, cs_real_t fra[8]) |
| | Copy rotation structure values to an array. More...
|
| |
◆ cs_rotation_add_coriolis_t()
Add the dual tensor of a rotation vector to a tensor.
- Parameters
-
| [in] | r | pointer to rotation structure |
| [in] | c | multiplicative coefficient |
| [in,out] | tr | tensor to which dual tensor of rotation is added |
◆ cs_rotation_add_coriolis_v()
Add a Coriolis term to a vector.
- Parameters
-
| [in] | r | pointer to rotation structure |
| [in] | c | multiplicative coefficient |
| [in] | v | velocity |
| [in,out] | vr | resulting Coriolis term |
◆ cs_rotation_coriolis_t()
Compute the dual tensor of a rotation vector.
- Parameters
-
| [in] | r | pointer to rotation structure |
| [in] | c | multiplicative coefficient |
| [out] | tr | dual tensor of rotation is added |
◆ cs_rotation_coriolis_v()
Compute a vector Coriolis term.
- Parameters
-
| [in] | r | pointer to rotation structure |
| [in] | c | multiplicative coefficient |
| [in] | v | velocity |
| [out] | vr | resulting Coriolis term |
◆ cs_rotation_cyl_v()
Express a vector in the cyclindrical system associated to a rotation.
- Parameters
-
| [in] | r | pointer to rotation structure |
| [in] | p | cartesian coordinates of the location point |
| [in] | v | vector components in cartesian coordinates system |
| [out] | vc | vector components in cylindrical coordinates system |
◆ cs_rotation_define()
| void cs_rotation_define |
( |
double |
omega_x, |
|
|
double |
omega_y, |
|
|
double |
omega_z, |
|
|
double |
invariant_x, |
|
|
double |
invariant_y, |
|
|
double |
invariant_z |
|
) |
| |
Define a global rotation.
The rotation vector's length determines the angular velocity (in rad/s).
- Parameters
-
| [in] | omega_x | rotation vector x component |
| [in] | omega_y | rotation vector y component |
| [in] | omega_z | rotation vector z component |
| [in] | invariant_x | invariant point x component |
| [in] | invariant_y | invariant point y component |
| [in] | invariant_z | invariant point z component |
◆ cs_rotation_matrix()
| void cs_rotation_matrix |
( |
double |
theta, |
|
|
const double |
axis[3], |
|
|
const double |
invariant_point[3], |
|
|
double |
matrix[3][4] |
|
) |
| |
Compute rotation matrix.
- Parameters
-
| [in] | theta | rotation angle, in radians |
| [in] | axis | rotation axis direction vector |
| [in] | invariant_point | invariant point coordinates |
| [out] | matrix | resulting rotation matrix |
◆ cs_rotation_to_array()
| void cs_rotation_to_array |
( |
int |
r_num, |
|
|
cs_real_t |
fra[8] |
|
) |
| |
Copy rotation structure values to an array.
This may be useful to avoid requiring specific type mappings for MPI or other programming languages.
- Parameters
-
| [in] | r_num | rotation number (1 to n numbering, 0 for none) |
| [in] | fra | flat rotation array: axis (0-2), invariant(3-5), omega (6), angle(7) |
◆ cs_rotation_update_coords()
Update coordinates based on a global rotation and time.
- Parameters
-
| [in] | n_coords | number of coordinates |
| [in] | t_rot | time since rotation start |
| [in,out] | coords | coordinates array |
◆ cs_rotation_velocity()
Compute velocity relative to a fixed frame at a given point.
- Parameters
-
| [in] | r | pointer to rotation structure |
| [in] | coords | point coordinates |
| [out] | vr | resulting rotation frame velocity |
◆ cs_glob_rotation
 1.8.16
1.8.16