In general it is recommended to obtain a prebuilt binary package for your
platform. Given how apcupsd must integrate into the shutdown mechanism of the
operating system and the rate at which such mechanisms are changed by
vendors, the platform ports in the apcupsd tree may become out of date. In
some cases, binary packages are provided by the apcupsd team (RedHat,
Mandriva, SuSE, Windows, Mac OS X). For other platforms it is recommended to
check your vendor's package repository and third party repositories for
recent binary packages before resorting to building apcupsd from scratch.
Note that some vendors continue to distribute ancient versions of apcupsd
with known defects. These packages should not be used.
For systems based on RPM packages, such as Red Hat and SuSE, apcupsd is
available in binary RPM format. This is the simplest way to
install. If you have no previous version of apcupsd on your machine
and are creating a standalone configuration, simply install the RPM
with a normal 'rpm -ihv' command. You're done, and can now skip
the rest of this chapter and go straight to tweaking your run-time
configuration file. (see After Installation)
If you have a previous installation, you can upgrade with a normal
'rpm -Uhv', but this may not upgrade the halt script. It may be
better to do the upgrade as a remove 'rpm -e' followed by a
fresh install 'rpm -ihv'.
After installation of the binary RPM, please verify carefully that
/etc/rc.d/init.d/halt was properly updated and contains new script
lines flagged with ***APCUPSD***.
Since there is no standard location for cgi-bin, the rpm will place
the binary CGI programs in the directory /etc/apcupsd/cgi. To
actually use them, you must copy or move them to your actual
cgi-bin directory, which on many systems is located in
/home/httpd/cgi-bin.
The Windows version of apcupsd is distributed as a simple double-click
installer. Installation is very simple and straight-forward: Simply
double-click the installer executable and follow the instructions. See
The Windows Version of apcupsd for further details.
Installation from source might have to be be done different ways
depending on what system you are running. The basic procedure
involves getting a source distribution, running the configuration,
rebuilding, and installing.
For building the system, we suggest that you run the configure and
make processes as your normal UNIX user ID. The 'make install'
must be run as root. But if your normal ID has an environment setup
for using the C compiler, it's simpler to do that than to set up
root to have the correct environment.
apcupsd requires gcc and g++ compilers as well as GNU make.
Other compilers or BSD make will not work. GNU make is sometimes
installed as gmake. The configure script will check for this and will
inform you of what command to use to invoke GNU make.
The basic installation from a tar source file is rather simple:
- Unpack the source code from its tar archive.
- Go into the directory containing the source code.
- Run './configure' (with appropriate options as described
below)
- 'make' or 'gmake'' as instructed by configure
- 'su' (i.e. become root)
- Stop any running instance of apcupsd. The command to do this
will look like 'system-dependent-path/apcupsd stop'
- uninstall any old apcupsd This is important since the default
install locations may have changed.
- 'make install' or 'gmake install'
- edit your /etc/apcupsd/apcupsd.conf file if necessary
- ensure that your halt script is properly updated
- Start the new apcupsd with: 'system-dependent-path/apcupsd
start'
If all goes well, the './configure' will correctly determine which
operating system you are running and configure the source code
appropriately. configure currently recognizes the systems listed
below in the Operating System Specifics section of this chapter and
adapts the configuration appropriately. Check that the
configuration report printed at the end of the configure process
corresponds to your choice of directories, options, and that it has
correctly detected your operating system. If not, redo the
configure with the appropriate options until your configuration is
correct.
Please note that a number of the configure options preset
apcupsd.conf directive values in an attempt to automatically adapt
apcupsd as best possible to your system. You can change the values
in apcupsd.conf at a later time without redoing the configuration
process by simply editing the apcupsd.conf file.
Other configuration options can be used to set up the installation
of HTML documentation and optional modules, notably the CGI
interface that enables the UPS state to be queried via the Web. You
will find a complete reference later in this chapter.
In general, you will probably want to supply a more elaborate
configure statement to ensure that the modules you want are built
and that everything is placed into the correct directories.
On Red Hat, a fairly typical configuration command would look like
the following:
CFLAGS="-g -O2" LDFLAGS="-g" ./configure \
--enable-usb \
--with-upstype=usb \
--with-upscable=usb \
--prefix=/usr \
--sbindir=/sbin \
--with-cgi-bin=/var/www/cgi-bin \
--enable-cgi \
--with-log-dir=/etc/apcupsd
By default, 'make install' will install the executable files in
/sbin, the manuals in /usr/man, and the configuration and script
files in /etc/apcupsd. In addition, if your system is recognized,
certain files such as the startup script and the system halt script
will be placed in appropriate system directories (usually
subdirectories of /etc/rc.d).
There are a number of things that you can do to check if the
installation (make install) went well. The fist is to check where
the system has installed apcupsd using 'which' and 'whereis'. On
my Red Hat system, you should get the following (lines preceded
with a $ indicate what you type):
$ which apcupsd
/sbin/apcupsd
$ whereis apcupsd
apcupsd: /sbin/apcupsd /etc/apcupsd /etc/apcupsd.conf
/etc/apcupsd.status /usr/man/man8/apcupsd.8.gz
/usr/man/man8/apcupsd.8
If you find an apcupsd in /usr/sbin, /usr/local/sbin, /usr/lib, or
another such directory, it is probably a piece of an old version of
apcupsd that you can delete. If you are in doubt, delete it, then
rerun the 'make install' to ensure that you haven't deleted
anything needed by the new apcupsd. Please note that the files
specified above assume the default installation locations.
As a final check that the 'make install' went well, you should
check your halt script (in /etc/rc.d on SUSE systems, and in
/etc/rc.d/init.d on Red Hat systems) to see that the appropriate
lines have been inserted in the correct place. Modification of the
halt script is important so that at the end of the shutdown
procedure, apcupsd will be called again to command the UPS to turn
off the power. This should only be done in a power failure
situation as indicated by the presence of the /etc/powerfail file,
and is necessary if you want your machine to automatically be
restarted when the power returns. On a Red Hat system, the lines
containing the # ***apcupsd*** should be inserted just
before the final halt command:
# Remount read only anything that's left mounted.
#echo "Remounting remaining filesystems (if any) readonly"
mount | awk '/ext2/ { print $3 }' | while read line; do
mount -n -o ro,remount $line
done
# See if this is a powerfail situation. # ***apcupsd***
if [ -f /etc/apcupsd/powerfail ]; then # ***apcupsd***
echo # ***apcupsd***
echo "APCUPSD will now power off the UPS" # ***apcupsd***
echo # ***apcupsd***
/etc/apcupsd/apccontrol killpower # ***apcupsd***
echo # ***apcupsd***
echo "Please ensure that the UPS has powered off before rebooting" # ***apcupsd***
echo "Otherwise, the UPS may cut the power during the reboot!!!" # ***apcupsd***
echo # ***apcupsd***
fi # ***apcupsd***
# Now halt or reboot.
echo "$message"
if [ -f /fastboot ]; then
echo "On the next boot fsck will be skipped."
elif [ -f /forcefsck ]; then
echo "On the next boot fsck will be forced."
fi
The purpose of modifying the system halt files is so that apcupsd
will be recalled after the system is in a stable state. At that
point, apcupsd will instruct the UPS to shut off the power. This is
necessary if you wish your system to automatically reboot when the
mains power is restored. If you prefer to manually reboot your
system, you can skip this final system dependent installation step
by specifying the disable-install-distdir option on the
'./configure' command (see below for more details).
The above pertains to Red Hat systems only. There are significant
differences in the procedures on each system, as well as the
location of the halt script. Also, the information that is inserted
in your halt script varies from system to system. Other systems
such as Solaris require you the make the changes manually, which
has the advantage that you won't have any unpleasant surprises in
your halt script should things go wrong. Please consult the
specific system dependent README files for more details.
Please note that if you install from RPMs for a slave machine, you
will need to remove the changes that the RPM install script made
(similar to what is noted above) to the halt script. This is
because on a slave machine there is no connection to the UPS, so
there is no need to attempt to power off the UPS. That will be done
by the master.
For most systems, we recommend the following options:
./configure --prefix=/usr --sbindir=/sbin --enable-usb
and you can optionally build and install the CGI programs as
follows:
./configure --prefix=/usr --sbindir=/sbin --enable-usb \
--enable-cgi --with-cgi-bin=/home/httpd/cgi-bin
Some systems require unusual options
for compilation or linking that the './configure' script does not
know about. You can specify initial values for variables by setting
them in the environment. Using a Bourne-compatible shell, you can
do that on the command line like this:
CFLAGS="-O2 -Wall" LDFLAGS= ./configure
Or on systems that have the env program, you can do it like
this:
env CPPFLAGS=-I/usr/local/include LDFLAGS=-s ./configure
Or for example on the Sun Solaris system, you can use:
setenv CFLAGS -O2
setenv LDFLAGS -O
./configure
You can get a listing of all available options by doing:
./configure --help
or simply see the previous section of this manual.
With the exception of Linux SUSE and Linux Red Hat
systems used by the developers, we rely on users to help create
installation scripts and instructions as well as to test that
apcupsd runs correctly on their system. As you can imagine, most of
these people are system administrators rather than developers so
they are very busy and don't always have time to test the latest
releases. With that in mind, we believe that you will find that a
lot of very valuable work has been already done to make your
installation much easier (and probably totally automatic).
Below, you will find a list of operating systems for which we have
received installation files:
This port is complete and is being used by several users. Since Debian
build and install procedures are somewhat particular, we have put the extra
Debian information into the following two subdirectories:
platforms/debian/examples and platforms/debian/packageinfo
You can also find the official Debian packages on the Debian site
at:
This port is complete and is being used by several users.
You will need to install and use GNU make (aka gmake) instead of the
BSD make supplied with the system.
On the FreeBSD OS, there is no known way for a user program to get
control when all the disks are synced. This is needed for apcupsd
to be able to issue the killpower command to the UPS so that the
UPS shuts off the power. To accomplish the same thing on FreeBSD
systems, make sure you have a SmartUPS and that your UPS shutdown
grace period is set sufficiently long so that you system will power
down (usually 2 minutes), the use the --kill-on-powerfail option
on the apcupsd command line.
Status of this port is unknown.
You will need to install and use GNU make (aka gmake) instead of the
BSD make supplied with the system.
On OS X (Darwin), apcupsd can be built with configure defaults.
The USB driver can be enabled, as per the directions on Mac OS X (Darwin)
USB Configuration Apcupsd may be usable
on OS X with a smart serial device, but certainly does work as a
NIS client or using a USB interface.
The startup information will be installed in
/Library/StartupItems/apcupsd which is part of darwin's
SystemStartup.
You will need to install and use GNU make (aka gmake) instead of the
BSD make supplied with the system.
Ensure that you read
the distributions/openbsd/README file before running apcupsd. There
are some critical differences in how the OpenBSD implementation
operates when the UPS batteries are exhausted. Failure to take this
into account may result in the system not being fully halted when
power is lost.
Red Hat systems are
fully supported, and by following the standard installation
instructions given above, you should experience few or no
problems.
Slackware
systems are fully supported, and by following the standard
installation instructions given above, you should experience few or
no problems.
SUSE systems are fully
supported, and by following the standard installation instructions
given above, you should experience few or no problems.
Please read this before attempting to compile or install the beta
software. It contains important information that will make your
efforts easier.
Before running './configure', please be sure that you do not have
/usr/ucb on your path. This may cause the configure to choose
the wrong shutdown program. If configure detects that /usr/usb
is on your path, it will print a warning message. Please follow the
advice to avoid shutdown problems.
Your normal UNIX user ID must own the source tree directories, and
you must have the normal development tools in your path. This
includes make, the compiler, the M4 preprocessor, the linker, and
ar or ranlib. If the user you are logged in as can compile and link
a C program from a source file, then you have all the required
tools available.
You will want to install the executables in a directory that
remains mounted during the shutdown. Solaris will unmount almost
everything except the root directories. Since the ability to power
the UPS off requires access to the executable programs, they need
to be in a directory that will never be unmounted. And since they
should also be in a directory that normal users cannot get into,
/sbin is the default. However, please be aware that if you want to
follow Sun's filesystem conventions you would use the following:
./configure \
--prefix=/opt/apcupsd \
--sbindir=/etc/opt/apcupsd/sbin \
--sysconfdir=/etc/opt/apcupsd \
--with-cgi-bin=/opt/apcupsd/cgi-bin
The way to setup the /sbin directory as the executables directory
is to pass configure the --sbindir=/sbin option. No other
arguments should be required, and your setup and platform should be
detected automatically by configure.
Once you have run configure, you will need to do a 'gmake'. Once
the make has completed with no errors, you must su to root to
complete the install. After the su, you may not have a path to the
make program anymore. In that case, you should do the 'gmake
install' step as:
gmake install
Once the install completes, you must edit the /sbin/rc0 script as
detailed below, then exit from the su'ed shell.
In order to support unattended operation and shutdown during a
power failure, it's important that the UPS remove power after the
shutdown completes. This allows the unattended UPS to reboot the
system when power returns by re-powering the system. Of course, you
need autoboot enabled for your system to do this, but all Solaris
systems have this by default. If you have disabled this on your
system, please re-enable it.
To get the UPS to remove power from the system at the correct time
during shutdown, i.e., after the disks have done their final sync,
we need to modify a system script. This script is /sbin/rc0.
We do not have access to every version of Solaris, but we believe
this file will be almost identical on every version. Please let us
know if this is not true.
At the very end of the /sbin/rc0 script, you should find lines just
like the following:
# unmount file systems. /usr, /var and /var/adm are not unmounted by umountall
# because they are mounted by rcS (for single user mode) rather than
# mountall.
# If this is changed, mountall, umountall and rcS should also change.
/sbin/umountall
/sbin/umount /var/adm >/dev/null 2>\&1
/sbin/umount /var >/dev/null 2>\&1
/sbin/umount /usr >/dev/null 2>\&1
echo 'The system is down.'
We need to insert the following lines just before the last 'echo':
#see if this is a powerfail situation
if [ -f /etc/apcupsd/powerfail ]; then
echo
echo "APCUPSD will power off the UPS"
echo
/etc/apcupsd/apccontrol killpower
echo
echo "Please ensure that the UPS has powered off before rebooting"
echo "Otherwise, the UPS may cut the power during the reboot!!!"
echo
fi
We have included these lines in a file called rc0.solaris in the
distributions/sun subdirectory of the source tree. You can cut and
paste them into the /sbin/rc0 file at the correct place, or yank
and put them using vi or any other editor. Note that you must be
root to edit this file.
You must be absolutely sure you have them in the right place. If
your /sbin/rc0 file does not look like the lines shown above, do
not modify the file. Instead, email a copy of the file to the
maintainers, and we will attempt to figure out what you should do.
If you mess up this file, the system will not shut down cleanly,
and you could lose data. Don't take the chance.
You will then need to make the normal changes to the
/etc/apcupsd/apcupsd.conf file. This file contains the
configuration settings for the package. It is important that you
set the values to match your UPS model and cable type, and the
serial port that you have attached the UPS to. People have used
both /dev/ttya and /dev/ttyb with no problems. You should be sure
that logins are disabled on the port you are going to use,
otherwise you will not be able to communicate with the UPS. If you
are not sure that logins are disabled for the port, run the
'admintool' program as root, and disable the port. The 'admintool'
program is a GUI administration program, and required that you are
running CDE, OpenWindows, or another XWindows program such as KDE.
Solaris probes the serial ports during boot, and during this
process, it toggles some handshaking lines used by dumb UPSes. As a
result, particularly for simple signalling "dumb" UPSes it seems to
kick it into a mode that makes the UPS think it's either in a
calibration run, or some self-test mode. Since at this point we are
really not communicating with the UPS, it's pretty hard to tell
what happened. But it's easy to prevent this, and you should.
Disconnect the UPS, and boot the system. When you get to a login
prompt, log in as root. Type the following command:
eeprom com1-noprobe=true
or
eeprom com2-noprobe=true
depending on which com port your UPS is attached to. Then sync and
shutdown the system normally, reattach the UPS, and reboot. This
should solve the problem. However, we have some reports that recent
versions of Solaris (7 & 8) appear to have removed this eeprom
option and there seems to be no way to suppress the serial port
probing during boot.
At this point, you should have a complete installation. The daemon
will load automatically at the next boot. Watch for any error
messages during boot, and check the event logs in /etc/apcupsd. If
everything looks OK, you can try testing the package by removing
power from the UPS. NOTE! if you have a voltage-signalling UPS,
please run the first power tests with your computer plugged into
the wall rather than into the UPS. This is because dumb serial-port
UPSes have a tendency to power off if your configuration or cable
are not correct.
As a user, your input is very helpful in solving problems with the
package, and providing suggestions and future directions for the
development of the package. We are striving to provide a useful
package that works across all platforms, and welcome your
feedback.
During the './configure', if apcupsd does not find one of the systems for
which it has specific installation programs, it will set the
Operating System to unknown and will use the incomplete
installation scripts that are in platforms/unknown. You
will be on your own, or you can ask the developers list
(apcupsd-users@lists.sourceforge.net) for installation
instructions. This directory also contains a hint file for Linux
From Scratch, which could be helpful for other systems as well.
Appropriate scripts
(actually Windows batch files) are included with the Apcupsd Win32
installer package.
Once you have installed apcupsd,
either from a binary package or by building from source, your next
step should be to inspect your /etc/apcupsd/apcupsd.conf file to
make sure it is valid.
You can read the complete reference on configuration directives
(Configuration Directive Reference), but if you are
setting up a normal standalone configuration you should only need
to check (and possibly fix) the first three items listed below.
Your UPSTYPE should be the UPS's protocol type: dumb, apcsmart,
usb, net, pcnet, or snmp. Your UPSCABLE should be the type of cable
you are using.
DEVICE should be set to the path of the device node
(usually in /dev) to use to communicate with the UPS. This is used primarily
for serial port connections. If you have a USB device, it is better not to
specify a DEVICE directive by leaving it black or commenting it out.
Apcupsd will automatically search for your device in the standard places.
If you specify a DEVICE, it should be the name of the device that
apcupsd is to use to communicate with the UPS.
If the first time you execute apcupsd, you get a message to the
effect that the Apcupsd USB driver is missing, it means that you
most likely forgot to put --enable-usb on your './configure'
command line.
The Configuration Examples chapter of this manual provides
the essential characteristics of each main type of configuration
file. After those elements are correct, apcupsd should run, and
then it is only a matter of customization of your setup.
The final consideration for a automatic reboot after a full power down
is to ensure that your computer will automatically reboot when the
power is restored.
This is not the normal behavior of most computers as shipped from
the factory. Normally after the power is cut and restored, you must
explicitly press a button for the power to actually be turned on.
You can test your computer by powering it down; shutting off the
power (pull the plug); then plugging the cord back in. If your
computer immediately starts up, good. There is nothing more to do.
If your computer does not start up, manually turn on the power (by
pressing the power on button) and enter your computer's SETUP
program (often by pressing DEL during the power up sequence;
sometimes by pressing F10). You must then find and change the
appropriate configuration parameter to permit instant power on.
Normally, this is located under the BOOT menu item, and will be
called something such as Restore on AC/Power Loss or Full-On.
The exact words will vary according to the ROM BIOS provider.
Generally you will have three options: Last State, Power On,
and Power Off. Although Last State should normally work, we
recommend setting your computers to Power On. This means that
whenever the power is applied they are on. The only way to shut
them off is to pull the plug or to have a special program that
powers them off (/sbin/poweroff on Linux systems).
If after making all the changes suggested above, you cannot get
your computer to automatically reboot, you might examine your halt
script (/etc/rc.d/init.d/halt in the case of Red Hat Linux) and see
if the final line that performs the halt or reboot contains the
-p option for powering down the computer. It should not with the
logic used by apcupsd, but if it does, the -p option could cause
your computer to power off while the UPS is still suppling power
(i.e. before the UPS kills the power). Depending on the setting of
your BIOS, it may prevent your computer from restarting when the
power returns. As already mentioned, this should not apply, but in
case of problems it is worth a try.
The simplest way to invoke apcupsd is from the command line by entering:
/sbin/apcupsd
To do so, you must be root. However, normally, you will want
apcupsd started automatically when your system boots. On some
systems with installation support (e.g. SUSE and Red Hat), the
installation procedure will create a script file that you will be
automatically invoked when your system reboots. On other systems,
you will have to invoke apcupsd from your rc.local script.
On Red Hat systems, this script file that automatically invokes
apcupsd on system start and stops is /etc/rc.d/init.d/apcupsd
To start apcupsd manually (as you will probably do immediately
following the installation), enter the following:
/etc/rc.d/init.d/apcupsd start
To understand how this file is automatically invoked at system
startup and shutdown, see the man pages for chkconfig(8).
On SUSE systems, the script file that automatically invokes apcupsd
on system start and stops is /etc/rc.d/apcupsd.
To start apcupsd manually (as you will probably do immediately
following the installation), enter the following:
/etc/rc.d/apcupsd start
Normally, when properly installed, apcupsd will be started and
stopped automatically by your system. Unfortunately, the details
are different for each system. Below, we give the commands for
selected systems. Alternatively, there are simple stopapcupsd and
startapcupsd scripts in the examples directory, or you can modify
one of the scripts in the distributions directory to meet your
needs.
To stop apcupsd you can do the following:
On Red Hat systems:
/etc/rc.d/init.d/apcupsd stop
On SUSE systems:
/etc/rc.d/apcupsd stop
Please see the Testing Apcupsd chapter for more details on insuring
that apcupsd is running properly.
If you have a USB UPS, the essential elements of your apcupsd.conf file
should look like the following:
## apcupsd.conf v1.1 ##
UPSCABLE usb
UPSTYPE usb
DEVICE
LOCKFILE /var/lock
UPSCLASS standalone
UPSMODE disable
Notice that we have not specified a device. In doing so, apcupsd
will try all the well known USB ports. We strongly recommend you
use this (empty device address) form unless you have a good reason
to do otherwise.
Please use the explicit specifications of a device only if you know
exactly what you are doing. In general, it is much easier to let
apcupsd find the device itself.
Please see USB Configuration for detailed help
on setting up your system to work with a USB UPS.
If you have a Smart UPS
using the serial cable supplied by APC, or you build a CUSTOM SMART cable
outlined in the cables chapter, a very simple configuration file
would look like the following:
## apcupsd.conf v1.1 ##
UPSCABLE smart
UPSTYPE apcsmart
DEVICE /dev/ttyS0
LOCKFILE /var/lock
UPSCLASS standalone
UPSMODE disable
Normally you would have many more configuration directives to
completely customize your installation, but this example shows you
the minimum required.
If you have a simple signaling
or dumb UPS such as a BackUPS, you will need to know exactly what
cable you have and specify it on the UPSCABLE directive. Please see
the list of UPSes versus cables in the beginning of this document
for more information. The cable number is normally stamped in the
plastic at one end of the cable. If you specify the wrong cable, it
is very likely that at the first power failure, your computer will
be immediately shutdown. This is an unfortunate consequence of the
dumb signaling mode. To avoid this, first replace
/etc/apcupsd/apccontrol with safe.apccontrol found in the
examples directory, then test until everything works correctly.
Once you have the correct cable, be sure to remember to reinstall
the correct apccontrol file and test that your computer is
correctly shutdown during a power failure.
## apcupsd.conf v1.1 ##
UPSCABLE (number of cable you have)
UPSTYPE dumb
DEVICE /dev/ttyS0
LOCKFILE /var/lock
UPSCLASS standalone
UPSMODE disable
If your cable does not have low battery detection, as is the case
with some older models, you will also need to define TIMEOUT nnn
where you set nn to be the number of seconds on a power failure
after which a shutdown is effected.
Normally you would have many more configuration directives to
completely customize your installation, but this example shows you
the minimum required.
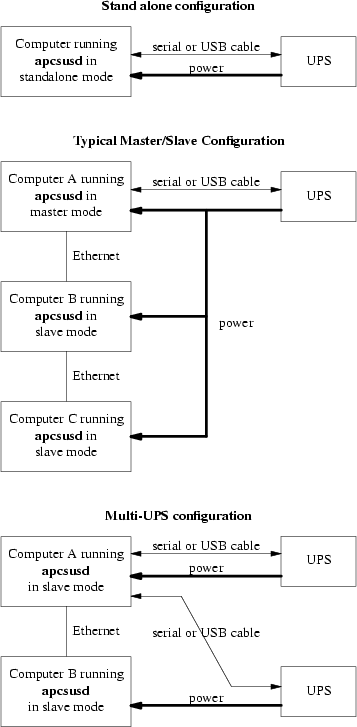
NIS (Network Information Server) mode allows for communication
between instances of apcupsd running on different hosts. Only one
of those hosts, the server, needs to talk to the UPS directly. The
others, clients, obtain information about the state of the UPS by
querying the server. NIS is not related to Sun's NIS/YP
services.
NIS clients and servers require that apcupsd be compiled with the
Net Driver --enable-net. This is typically enabled by default.
The NIS server is connected to the UPS and should be configured
exactly as a standalone configuration, but with NETSERVER on.
In all other respects, the server should be configured in
standalone mode. You may also set the NIS server specific options
NISIP to restrict which IP address of the server which apcupsd
listens on. The default, 0.0.0.0, means to list on all of the
server host's IP addresses; NISPORT (default 3551) to set which
TCP port the server listens on; and EVENTSFILE and
EVENTSFILEMAX to provide information about the last few events
to clients. You may also need to modify your firewall rules on the
server's host to allow traffic to the NISPORT.
For the NIS client computer, you will have a configuration that
looks something like what follows. What is important is that you
get the information from an UPSCABLE ether with UPSTYPE
net over the network and you must specify the address of
a NIS server using DEVICE. The client apcupsd will then poll
the NIS server specified in DEVICE every POLLTIME seconds
(formerly NETTIME).
## apcupsd.conf v1.1 ##
UPSCABLE ether
UPSTYPE net
LOCKFILE /var/lock
DEVICE server-network-address:3551
UPSCLASS standalone
UPSMODE disable
POLLTIME 10
The DEVICE is set to server-address:port, where
server-address is the fully qualified domain name or IP address
of the apcupsd NIS server, and port is the NISPORT that the
server is listening on. The default is 3551, but older versions of
apcupsd used port 7000.
If you set POLLTIME too large, your client may not see the
change in state of the NIS server before the server has shutdown.
Normally, you have at least 30 seconds of grace time between the
time the NIS server decides to shutdown and the time it no longer
responds. Your slave must poll during this interval.
Any client run using the Net driver will shutdown when its own
timers expire or when the NIS server shuts down, whichever occurs
first. This means that if you want the slave to shutdown before the
server, you need only set BATTERYLEVEL, MINUTES or
TIMEOUT on the client for a faster shutdown than the values
defined on the NIS server. This can often be useful if the slave is
less important than the master and you wish to reduce battery power
consumption so that the master can remain up longer during a power
outage.
NIS clients work principally by reading the STATFLAG record that is
sent by the NIS server (present in the output of apcaccess). The
low 16 bits are the standard APC status flag, and the upper 16 bits
represent the internal state of apcupsd, so the slave can see when
the power fails and know when to shutdown.
It would be possible to have a client also work as a server, but
that would increase the delay of information getting from the UPS
to the secondary client.
The difference between the NIS mode and the removed master/slave
mode is that the NIS server has no explicit knowledge of the
slaves. The NIS server makes its information available via the net
(NIS), and the NIS slaves read it. When the NIS server is going to
shutdown, it makes the information available to any NIS slave that
polls it, but the NIS server does not explicitly call each NIS
slave as is the case in the Master/Slave networking described
several sections above.
Think of the difference as push (Master/Slave) vs. pull
(NIS-based). In the case of M/S, the master makes all the shutdown
decisions and notifies the slaves when they are to shut down or
when some other interesting event happens. The slaves just do
whatever the master says, whenever the master says to. On the other
hand, with the NIS-based network config you basically "publish" the
UPS status from one server and then your clients view that status
and make their own decisions.
As of 3.14, Apcupsd supports the PowerChute Network Shutdown
protocol. This is an alternative to SNMP for use with APC's AP9617
family of network smartslot modules. Note that the older AP9606
modules do not support PCNET.
To enable PCNET support, configure with the --enable-pcnet
flag. This is typically enabled by default.
The required apcupsd.conf settings are straightforward:
## apcupsd.conf v1.1 ##
UPSCABLE ether
UPSTYPE pcnet
LOCKFILE /var/lock
DEVICE ipaddr:user:passphrase
UPSCLASS standalone
UPSMODE disable
The DEVICE setting specifies the IP address of the UPS as well
as the username and authentication passphrase to use. Note that the
username and passphrase are not the Web/SNMP login credentials.
They are separate settings. The default username on a new card is
"apc" and the default passphrase is "admin user phrase". To change
the passphrase, log in to the Web UI and go to the UPS tab, then to
PowerChute -> Configuration. (This assumes firmware v3.3.1. Other
versions may place the setting elsewhere.) The password must be a
minimum of 15 characters long. The web UI will silently ignore
shorter passwords and does not give an error message. There is no
apparent way to change the username.
Note that you may leave DEVICE blank and Apcupsd will accept
information from any PCNET UPS on the network,
however it will be very insecure since an attacker could easily send packets
crafted to cause your server to shut down.
Using the ipaddr, user, and passphrase will prevent this behavior.
You may need to take steps to ensure networking stays active during
your OS's shutdown sequence in order for the PCNET driver to power
off the UPS (the so-called "killpower" operation). On a Linux
distro, you can use commands such as...
chkconfig --level 0 network on
chkconfig --level 0 iptables on
...to make sure networking stays up.
MODBUS is APC's replacement for the aging 'apcsmart' (aka UPS-Link)
protocol. It is recommended for modern (ex: SMT series) Smart-UPS models.
As of 3.14.11, apcupsd supports the MODBUS protocol over RS232 serial
interfaces. As of 3.14.13, apcupsd supports the MODBUS protocol over USB.
Not all APC UPSes support MODBUS. New 2013 year Smart-UPS models are likely to
support it out-of-the-box and firmware updates are available for some older
models. APC/Schneider tech support is your best point of contact for determining
if a certain model will support MODBUS. That said, APC knowledge base article
FA164737 indicates MODBUS support is available for the majority of the SMC,
SMT, and SMX model lines.
The required apcupsd.conf settings for MODBUS are straightforward.
For MODBUS serial RS232:
## apcupsd.conf v1.1 ##
UPSCABLE smart
UPSTYPE modbus
DEVICE /dev/ttyS0
LOCKFILE /var/lock
UPSCLASS standalone
UPSMODE disable
The DEVICE setting identifies the serial port to which the UPS is connected.
This can take the form of COM1, etc. on Windows or /dev/XXX on UNIX
systems.
You should use the APC-supplied serial cable (P/N 940-0625A) that ships with
the UPS. Other 'smart' type cables may work, but only 940-0625A has been
formally tested at this time.
For MODBUS USB:
## apcupsd.conf v1.1 ##
UPSCABLE usb
UPSTYPE modbus
DEVICE
LOCKFILE /var/lock
UPSCLASS standalone
UPSMODE disable
The DEVICE setting can be left blank or, optionally, set to the serial
number of the UPS. If DEVICE is blank, apcupsd will attach to the first
APC UPS it finds, otherwise it will attach to the specific UPS identified by
the serial number.
Note that most UPSes ship with MODBUS support disabled by default. You must
use the UPS's front panel menu to enable MODBUS protocol support before apcupsd
will be able to communicate with the UPS. You may need to enable the "Advanced"
menu option before the MODBUS protocol option will be visible.
The following testing procedures apply for the
most part to SmartUPSes, whether USB or serial. If you have a
dumb voltage-signalling UPS, your testing procedures will be
somewhat different, and you should see the section on Testing
Serial UPSes (see Testing Serial-Line UPSes).
After you start apcupsd, execute the following command:
ps fax
or the equivalent for your system. You should see something similar
to the following output.
632 ? S 0:00 /sbin/apcupsd -f /etc/apcupsd/apcupsd.conf
841 ? S 0:00 \_ /sbin/apcupsd -f /etc/apcupsd/apcupsd.conf
842 ? S 0:00 \_ /sbin/apcupsd -f /etc/apcupsd/apcupsd.conf
This indicates that apcupsd is up and running and has started the
two standard threads in addition to the main thread.
If you see only one instance of apcupsd running, don't worry about
it as this is normal on most non-Linux systems, and on Linux 2.6.x
kernels.
If you do not find that apcupsd is in the above list, the most
likely problem is a configuration file glitch. If no messages were
printed, you should check your system log (normally
/var/log/messages) where you will find one or messages indicating
the nature of the problem.
Once you have established that the proper processes are running, do
a tail of the system log file, normally /var/log/messages:
tail /var/log/messages
You should see output that looks similar to the following:
Dec 5 17:01:05 matou apcupsd[5917]: apcupsd 3.7.2 startup succeeded
These messages should also appear in the temporary file
(/etc/apcupsd/apcupsd.events) if you are using the default
configuration file. If you have installed the RPM, they will
probably be in /var/log/apcupsd.events.
This test consists of running apcaccess to see if apcupsd is properly
updating its internal variables. Please note that you must enable
the apcupsd Network Information Server in your configuration file
for apcaccess to work. This is done by setting:
NETSERVER on
NISPORT 3551
in your apcupsd.conf file.
To run the apcaccess test, use the following command:
apcaccess status
Depending on the type of UPS you have, you will get slightly
different output, but an example For a Smart-UPS is as follows:
APC : 001,048,1088
DATE : Fri Dec 03 16:49:24 EST 1999
HOSTNAME : daughter
RELEASE : 3.7.2
CABLE : APC Cable 940-0024C
MODEL : APC Smart-UPS 600
UPSMODE : Stand Alone
UPSNAME : SU600
LINEV : 122.1 Volts
MAXLINEV : 123.3 Volts
MINLINEV : 122.1 Volts
LINEFREQ : 60.0 Hz
OUTPUTV : 122.1 Volts
LOADPCT : 32.7 Percent Load Capacity
BATTV : 26.6 Volts
BCHARGE : 095.0 Percent
MBATTCHG : 15 Percent
TIMELEFT : 19.0 Minutes
MINTIMEL : 3 Minutes
SENSE : Medium
DWAKE : 000 Seconds
DSHUTD : 020 Seconds
LOTRANS : 106.0 Volts
HITRANS : 129.0 Volts
RETPCT : 010.0 Percent
STATFLAG : 0x08 Status Flag
STATUS : ONLINE
ITEMP : 34.6 C Internal
ALARMDEL : Low Battery
LASTXFER : Unacceptable Utility Voltage Change
SELFTEST : NO
STESTI : 336
DLOWBATT : 05 Minutes
DIPSW : 0x00 Dip Switch
REG1 : N/A
REG2 : N/A
REG3 : 0x00 Register 3
MANDATE : 03/30/95
SERIALNO : 13035861
BATTDATE : 05/05/98
NOMOUTV : 115.0
NOMBATTV : 24.0
HUMIDITY : N/A
AMBTEMP : N/A
EXTBATTS : N/A
BADBATTS : N/A
FIRMWARE : N/A
APCMODEL : 6TD
END APC : Fri Dec 03 16:49:25 EST 1999
For a simple signaling or dumb UPS such as BackUPS, your output
will be very minimal as follows:
APC : 001,012,0319
DATE : Mon Feb 18 09:11:50 CST 2002
RELEASE : 3.8.5
UPSNAME : UPS_IDEN
CABLE : APC Cable 940-0128A
MODEL : BackUPS
UPSMODE : Stand Alone
STARTTIME: Mon Feb 18 09:11:45 CST 2002
LINEFAIL : OK
BATTSTAT : OK
STATFLAG : 0x008 Status Flag
END APC : Mon Feb 18 09:15:01 CST 2002
If you see the above output, it is a good sign that apcupsd is
working. Assuming that the output looks reasonable, check the
following variables:
- LINEV
- This is the line voltage and it should be a value
that is appropriate for your equipment. In the USA, it is typically
about 120 Volts while in Europe, it is about 220 Volts.
- BATTV
- Unless you have additional battery packs, this
should be near 24 Volts plus or minus 5 Volts.
- STATUS
- This is the status of the UPS and it should
normally be ONLINE.
A very disturbing tendance is for some of the newer (Mar 2004) RS
and ES UPSes to have no Voltage information. This is an annoying bug,
but not serious. On the other hand, some of those UPSes now have no
battery charge information BCHARGE. If BCHARGE is zero in your
listing and you are running a Smart or a USB UPS, then you will
have to set the BATTERYLEVEL directive in your apcupsd.conf file to
-1.
If you see a message to the effect of:
APCACCESS FATAL ERROR in apcaccess.c at line 336
tcp_open: cannot connect to server localhost on port 3551.
It means that you have probably not enabled the Network Information
Server in your configuration file for apcaccess to work. This is
done by setting NETSERVER and NISPORT in your apcupsd.conf file
as shown above.
At this point, you should ensure
that apcupsd is handling the connection to the UPS correctly. This
test assumes you have a UPS that speaks apcsmart protocol, over
either USB or a serial port. If you have an old-style
voltage-signaling UPS, please skip to the next section (Simulated
Power Fail Test).
When apcupsd detects a problem, it generates an EVENT, which
consists of sending a message to the system log then invoking the
apccontrol script (normally in /etc/acpupsd/apccontrol) to handle
the event.
In order to create an event, remove the serial port plug from the
back of your computer or from the back of the UPS. Within 6
seconds, apcupsd should detect the lack of serial port
communications and broadcast a wall message indicating that the
serial port communications was lost:
Warning communications lost with UPS lost.
At the same time, it sends the same message to the system log and
to the temporary EVENTS file (/etc/apcupsd/apcupsd.events).
Plug the serial port plug back into your computer, and within about
12 seconds, apcupsd should reestablish communications and broadcast
and log the following message:
Communications with UPS restored.
If these messages are logged but not broadcast, either you have
your mesg permission set to no (see 'man wall' or 'man mesg'),
or there is a problem with apccontrol. If you are running a window
manager such as GNOME and don't have a console window open, you may
not receive the wall messages. However, you should find them in
your system log file (normally /var/log/messages) and in the
temporary EVENTS file, /etc/apcupsd/apcupsd.events. For example, to
observe these events in the temporary EVENTS file, you might do a
tail -f /etc/apcupsd/apcupsd.events
Note, if you have installed from the RPM, the proper events file
may be /var/log/apcupsd.events. You can find the actual filename by
checking your apcupsd.conf file before running the test.
If you do not observe these messages, you should correct this
problem before proceeding with additional tests.
At this point, you should
verify that in the event of a power fail apcupsd properly calls
apccontrol. This test is appropriate for all models of UPSes (smart
or dumb).
To avoid the possibility that apcupsd might shut down your system,
locate where apccontrol resides on your system (normally,
/etc/apcupsd/apccontrol. Move this script to another location e.g.
apccontrol.save and replace it with the script found in
examples/safe.apccontrol. When that is done, ensure that your UPS
battery is fully charged and that you have at least 5 minutes of
remaining runtime on the batteries. This can be done by examining
the values of the BATTCHG and TIMELEFT variables in the
printout of 'apcaccess status'.
Athough this should not be necessary, as an extra precaution, you
can shutdown your machine, remove the plug from the UPS you are
testing, and plug your machine into another UPS or directly into
the wall. Doing so, will ensure that the UPS doesn't cut the power
to your machine at a bad time. Remember at the end of the testing
to plug your machine back into the UPS.
You can also minimize the risk from an unexpected shutdown by using
a journaling filesystem such as Linux's EXT3. All modern disk
drives park themselves safely when they power down, rather than
ploughing up oxide on your disk's recording surface. Thus,
unexpected power less has to hit very narrow timing windows in
order to trash an EXT3 transaction.
To begin the test, pull the power plug from the UPS. The first time
that you do this, psychologically it won't be easy, but after you
have pulled the plug a few times, you may even come to enjoy it. If
all goes well, apcupsd should detect the power failure and print
several warning messages. The first should appear after 5 to 6
seconds and read:
Warning power loss detected.
Then generally 6 seconds later, apcupsd is sure that it isn't a
transient effect, so it sends:
Power failure. Running on UPS batteries.
After a few more seconds (total around 15 seconds), plug the power
cord back in and ensure that apcupsd is aware that the power has
returned. It should print:
Power has returned...
If you do not observe the above messages, please correct the
situation before proceeding. The most likely cause of problems
are:
- apcupsd doesn't recognize the power failure because the
configuration directives are not correct. E.g. wrong cable.
- The file /etc/apcupsd/apccontrol doesn't exist or is not marked
as executable.
This is an intermediate
test that you can do, for all UPS models before doing the Full
Power Down Test. First modify the /etc/apcupsd/apccontrol file so
that in the killpower case, the line that re-executes apcupsd
with the --killpower option is commented out. The original
line probably looks something like:
${APCUPSD} --killpower
when it is commented out, it looks like:
#${APCUPSD} --killpower
Now when you pull the power plug, and either the timer expires or
the batteries are exhausted (see the next section for more
details), the system should be fully shutdown.
After performing this test, please be sure to restore
/etc/apcupsd/apccontrol to its previous state.
To complete the testing, you should do a power fail shutdown of your
system. This test is applicable to all UPS models. Please do a
backup of your system or take other precautions before attempting
this to avoid the possibility of lost data due to a problem (I have
been through this at least 10 times and never once had problems,
but we all know that someday something will go wrong).
Before proceeding, please ensure that your halt script or the
equivalent has been properly updated by the install process to
contain the logic to call apcupsd --killpower or apccontrol killpower
when it detects a power failure situation (the presence of a /etc/powerfail
file). See the Building and Installing apcupsd section of this manual,
or the README files for additional details about the halt modifications
necessary.
When you are ready to do the test, either simply pull the plug and
wait for the batteries to become exhausted, or set the TIMEOUT
configuration directive to something like 60 so that the system
will shutdown before the batteries are exhausted. We recommend
doing the full shutdown without using TIMEOUT to correctly
simulate a real power failure, but the choice is yours (I did it
once here, but now use TIMEOUT 30).
If all goes well, your system should be shutdown before the
batteries are completely exhausted and the UPS should be powered
off by apcupsd. Please be aware that if you do the full power down,
you must ensure that your UPS is totally powered off. Otherwise, it
may have been given the command to power off, but due to a long
grace period it is still waiting. If you were to reboot your
computer during the grace period, the UPS could then suddenly turn
off the power (this happened to me). To avoid this problem, always
wait for your UPS to power itself off, or power if off manually
before restarting your computer. On my system, the UPS is
configured as at the factory to have a 180 second grace period
before shutting off the power. During this type of testing, 180
seconds seems like an eternity, so please take care to either
wait or manually power off your UPS. To determine what grace period
is programmed into your UPS EEPROM, run 'apcaccess eprom' and look
at the "Shutdown grace delay".
If you experienced so problems with
the above testing procedures, or if you are porting apcupsd to
another system, or you are simply curious, you may want to know
exactly what is going on during the shutdown process. If so, please
see the Shutdown Sequence section of this manual.
apctest is a program that allows you to talk
directly to your UPS and run certain low-level tests, adjust various settings
such as the battery installation date and alarm behavior, and perform a
battery runtime calibration. Here we describe how to use it for a SmartUPS
utilizing the apcsmart driver and RS232 serial connection.
The menus and options for USB, MODBUS, and simple signaling UPSes are different
but mostly self-explanatory.
Shutdown apcupsd if it is running. This is important. Only one program can
communicate with the UPS at a time and if apcupsd is running, apctest will fail
to contact the UPS.
Run apctest by invoking it with no arguments.
It will read your installed apcupsd.conf configuration (so it knows
where to find the UPS) and then it will present you with the
following output:
2003-07-07 11:19:21 apctest 3.10.6 (07 July 2003) redhat
Checking configuration ...
Attached to driver: apcsmart
sharenet.type = DISABLE
cable.type = CUSTOM_SMART
You are using a SMART cable type, so I'm entering SMART test mode
mode.type = SMART
Setting up serial port ...
Creating serial port lock file ...
Hello, this is the apcupsd Cable Test program.
This part of apctest is for testing Smart UPSes.
Please select the function you want to perform.
1) Query the UPS for all known values
2) Perform a Battery Runtime Calibration
3) Abort Battery Calibration
4) Monitor Battery Calibration progress
5) Program EEPROM
6) Enter TTY mode communicating with UPS
7) Quit
Select function number: 1
Item 1 will probe the UPS for all values known to apcupsd and
present them in rather raw format. This output can be useful for
providing technical support if you are having problems with your
UPS.
Item 2 will perform a Battery Runtime Calibration. This test will
only be performed if your battery is 100% charged. Running the test
will cause the batteries to be discharged to approximately 30% of
capacity. The exact number depends on the UPS model. In any case,
apctest will abort the test if it detects that the battery charge
is 20% or less.
The advantage of doing this test is that the UPS will be able to
recalibrate the remaining runtime counter that it maintains in its
firmware. As your batteries age, they tend to hold less of a
charge, so the runtime calibration may not be accurate after
several years.
We recommend that perform a Battery Calibration about once a year.
You should not perform this calibration too often since discharging
the batteries tends to shorten their lifespan.
Item 3 can be used to abort a Battery Calibration in progress, if
you some how became disconnected.
Item 4 can be used to restart the monitoring of a Battery
Calibration if you should some how become disconnected during the
test.
Item 5 is used to program the EEPROM. Please see the Configuration
Directives Used to Set the UPS EEPROM chapter of this manual for the
details.
Item 6 will initiate a direct communication between your terminal
and the UPS, at which point you can enter raw UPS commands. Please
be aware that you should be careful what commands you enter because
you can cause your UPS to suddenly shutdown, or you can modify the
EEPROM in a way to disable your UPS. The details of the raw Smart
mode UPS commands can be found in the APC Smart Protocol
chapter of this manual.
Item 7 will terminate apctest.
After you have verified
that your UPS is working correctly, you will probably want to query
the state of its health occasionally. The tools apcupsd gives you
to do this include one command-line utility (apcaccess) and a GUI
you can use through a Web browser. You can also use apctest to tune
some parameters of the UPS itself.
apcaccess is a program (normally found in
/sbin/apcaccess) that permits you to print out the complete status
of your UPS.
apcaccess will use the Network Information Server to obtain the
necessary information. You
can specify a second optional argument to apcaccess in the form of
host:port where the :port is optional. The default is
localhost:3551. Please note that in versions prior to 3.10.6, the
default NIS port was 7000, so if you are mixing versions, you will
need to take a lot of care to ensure that all components are using
the same port.
To enable the apcupsd Network Information Server, which is normally
the default, you set:
NETSERVER on
NISPORT 3551
in your apcupsd.conf file.
The full form of the apcaccess command is:
apcaccess status localhost:3551
where only apcaccess status should normally be needed. localhost
may be replaced by any machine name, fully qualified domain name,
or IP address, which means that apcaccess can access any UPS on the
network running the Network Information Server.
The status command line option of apcaccess will produce a full
printout of all the STATUS variables used by apcupsd. This can
be very helpful for checking the condition of your UPS and to know
whether or not apcupsd is properly connected to it.
Please note that if you invoke apcaccess within the first 30
seconds of launching apcupsd, you will likely get an error message
such as:
APCACCESS FATAL ERROR in apcaccess.c at line 336
tcp_open: cannot connect to server localhost on port 3551.
This is because apcupsd is still in the process of initializing the
UPS. The solution is to wait at least 30 seconds after starting apcupsd
before launching apcaccess.
For a SmartUPS 1000 apcaccess will emit the following output:
DATE : Fri Dec 03 12:34:26 CET 1999
HOSTNAME : matou
RELEASE : 3.7.0-beta-1
CABLE : Custom Cable Smart
MODEL : SMART-UPS 1000
UPSMODE : Stand Alone
UPSNAME : UPS_IDEN
LINEV : 232.7 Volts
MAXLINEV : 236.6 Volts
MINLINEV : 231.4 Volts
LINEFREQ : 50.0 Hz
OUTPUTV : 232.7 Volts
LOADPCT : 11.4 Percent Load Capacity
BATTV : 27.7 Volts
BCHARGE : 100.0 Percent
MBATTCHG : 5 Percent
TIMELEFT : 112.0 Minutes
MINTIMEL : 3 Minutes
SENSE : Low
DWAKE : 060 Seconds
DSHUTD : 180 Seconds
LOTRANS : 204.0 Volts
HITRANS : 253.0 Volts
RETPCT : 050.0 Percent
STATFLAG : 0x08 Status Flag
STATUS : ONLINE
ITEMP : 29.2 C Internal
ALARMDEL : Low Battery
LASTXFER : U command or Self Test
SELFTEST : NO
STESTI : 336
DLOWBATT : 02 Minutes
DIPSW : 0x00 Dip Switch
REG1 : 0x00 Register 1
REG2 : 0x00 Register 2
REG3 : 0x00 Register 3
MANDATE : 01/05/99
SERIALNO : GS9902009459
BATTDATE : 01/05/99
NOMOUTV : 230.0
NOMBATTV : 24.0
HUMIDITY : N/A
AMBTEMP : N/A
EXTBATTS : 0
BADBATTS : N/A
FIRMWARE : 60.11.I
APCMODEL : IWI
END APC : Fri Dec 03 12:34:33 CET 1999
For the various smaller, cheaper APC USB UPSes, such as the CS, ES,
..., you will get much of the information that is presented above,
but not all of it. For example, you will not get MAXLINEV,
MINLINEV, LINEFREQ, ... and in particular, the LOADPCT will be zero
when you are running on mains. LOADPCT will display when the UPS is
on batteries. You must remember that the non-SmartUPSes are much
simpler (and less expensive) and therefore produce less
information.
When a major event is
generated within apcupsd, control is passed to the script
apccontrol normally found in /etc/apcupsd/apccontrol. The event
name, and a number of other important parameters are passed to the
script.
The major function of the apccontrol script is to perform a
shutdown of the system (as well as the killpower operation). In
addition, another major task for this script is to notify you by
email when certain events such as powerfail occur.
Since apccontrol is a script, you can customize it to your own
needs using any text editor. To do so, you must have a minimal
knowledge of Unix shell programming. In addition, another feature
is that you can write your own scripts that will be automatically
called by apccontrol before any of its own code is executed.
Details of the events and how to program them are contained in the
Advanced topics section entitled Customizing Event Handling.
There are four CGI programs (multimon.cgi, upsstats.cgi, upsfstats.cgi, and
upsimage.cgi). To have them properly installed, you must run the
'./configure' command with --enable-cgi and you should
specify an installation directory with --with-cgi-bin= or
load them manually. The default directory for installation of the
CGI programs is /etc/apcupsd, which is not really where you want
them if you are going to use them. Normally, they should go in the
cgi-bin of your Web server.
Once built and loaded, they will give you the status of your UPS or
UPSes via a web browser.
Normally only multimon.cgi is directly invoked by the user.
However, it is possible to directly invoke upsstats.cgi and
upsfstats.cgi. upsimage.cgi should never be directly invoked as it
is used by upsstats.cgi to produce the bar charts.
Before using multimon and the other CGI programs, first ensure that
apcupsd is configured to run the Network Information Server. This
is done by setting NETSERVER on in /etc/apcupsd/apcupsd.conf.
This switch is on by default.
Next you must edit the hosts file /etc/apcupsd/hosts.conf and at
the end, add the name of the hosts you want to monitor and a label
string for them. For example:
MONITOR matou "Server"
MONITOR polymatou "Backup server"
MONITOR deuter "Disk server"
matou, polymatou, and deuter are the network names of the three
machines currently running apcupsd. Please note that the network
names may either be IP addresses or fully qualified domain names.
The network name (or IP address) may optionally be followed by
:port, where the port is the NIS port address you wish to use.
This is useful if you are running multiple copies of apcupsd on the
same system or if you are running in a mixed vendor environment
where the NIS port assignments differ. An example could be the
following:
MONITOR matou "Server"
MONITOR polymatou "Backup server"
MONITOR deuter "Disk server"
MONITOR polymatou:7001 "APC USB UPS"
where the USB copy of apcupsd has been configured to use port 7001 by
modifying apcupsd.conf. Note, the default NIS port is 3551 on most
platforms.
To test multimon.cgi, you can execute it as non-root directly from
the source cgi build directory. To do so, enter at a shell prompt:
./multimon.cgi
If everything is set up correctly, it will print a bunch of HTML
with the values of the machines that you have put in the hosts.conf
file. It should look something like the following (note, only a
small portion of the output is reproduced here):
Content-type: text/html
<!DOCTYPE HTML PUBLIC "-//W3C//DTD HTML 4.0 Transitional//EN"
"http://www.w3.org/TR/REC-html40/loose.dtd">
<HTML>
<HEAD><TITLE>Multimon: UPS Status Page</TITLE></HEAD>
<BODY BGCOLOR="#FFFFFF">
<TABLE BGCOLOR="#50A0A0" ALIGN=CENTER>
<TR><TD>
<TABLE CELLPADDING=5>
<TR>
<TH COLSPAN=10 BGCOLOR="#60B0B0">
<FONT SIZE="+2">APCUPSD UPS Network Monitor</FONT>
<BR>Sun Jan 16 12:07:27 CET 2000</TH>
</TR>
<TR BGCOLOR="#60B0B0">
<TH COLSPAN=1>System</TH>
<TH COLSPAN=1>Model</TH>
<TH COLSPAN=1>Status</TH>
...
If you do not get similar output, check the permissions of the
/etc/apcupsd directory and of those of /etc/apcupsd/hosts.conf to
ensure that your web server can access it. At many sites, the Apache
server is not running as root, so you must be
careful to ensure that that /etc/apcupsd/hosts.conf and
/etc/apcupsd/multimon.conf are world readable.
To invoke multimon in your Web browser, enter:
http://your-site/cgi-bin/multimon.cgi
You should get something similar to the screen shot shown below.
If you wish additional control over the colors, type faces, and
sizes of the multimon output, you may simply edit the apcupsd.css
file to specify the styles you prefer.
The CGI programs compiled for Windows are included in the Windows package
starting with apcupsd-3.14.7.
The CGI programs included with the Windows package are intended
to be run on Windows. If your web server is running on Linux or another
operating system, you will need to obtain binary packages for that platform
(or build them from source) instead. The windows build of the CGI programs has
been tested with the Apache web server for Win32. They should also work with MS
Internet Information Server (IIS).
To use the programs, copy the contents of the cgi/ directory from your
apcupsd installation directory to the cgi-bin/ directory of your web server.
Consult your web server's documentation for how to enable CGI programs to be
executed. Sometimes special security settings are required.
Configure the hosts.conf file as described above. The programs expect to find
the hosts.conf file and the apcupsd.css file in the directory
\apcupsd\etc\apcupsd on the same drive letter as the web server's
cgi-bin directory. If you installed apcupsd into C:\apcupsd (the
default) and your web server's cgi-bin/ directory is also located on the
C: drive, no further changes are necessary. If you installed apcupsd into a
different directory or your web server cgi-bin is on another drive, you will
need to relocate hosts.conf and apcupsd.css from the apcupsd install
location to \apcupsd\etc\apcupsd on the appropriate drive.
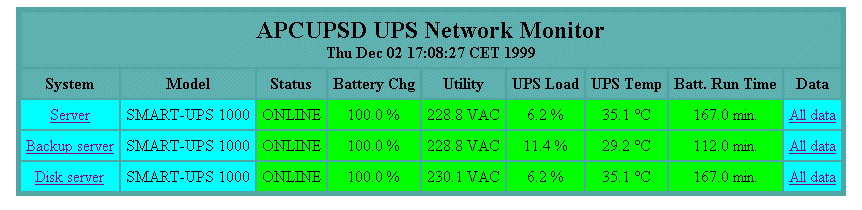
This program
monitors multiple UPSes at the same time. A typical output of
multimon.cgi as displayed in your Web browser might look like the
following:
The machines monitored as well as the values and their column
headings are all configurable (see /etc/apcupsd/hosts.conf and
/etc/apcupsd/multimon.conf)
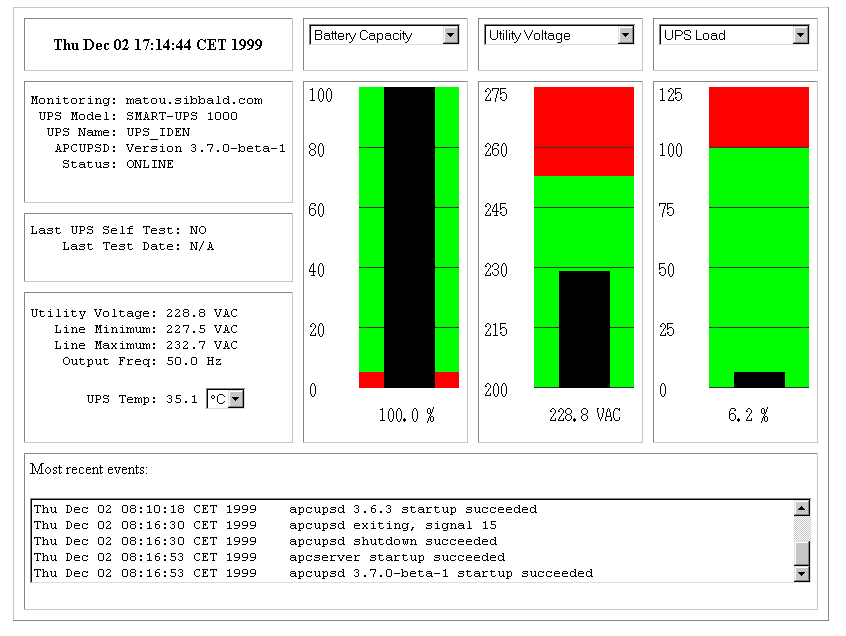
By clicking on the system name in the multimon.cgi display, you will
invoke upsstats.cgi for the specified system, which will produce a bar
graph display of three of the monitored values. For example,
You can display different bar graphs by selecting different
variables from the drop down menus at the top of each of the three
bar graphs.
As with multimon, if you have your local host configured in the
/etc/apcupsd/hosts.conf file, you can execute it from a Unix shell
from the source cgi directory as follows:
./upsstats.cgi
As with multimon, quite a few lines of html should then be displayed.
If you
would like to see all of the STATUS variables available over the
network, click on the Data field of the desired system, and your
browser will display something like the following:
APC : 001,048,1109
DATE : Thu Dec 02 17:27:21 CET 1999
HOSTNAME : matou.sibbald.com
RELEASE : 3.7.0-beta-1
CABLE : Custom Cable Smart
MODEL : SMART-UPS 1000
UPSMODE : Stand Alone
UPSNAME : UPS_IDEN
LINEV : 223.6 Volts
MAXLINEV : 224.9 Volts
MINLINEV : 222.3 Volts
LINEFREQ : 50.0 Hz
OUTPUTV : 223.6 Volts
LOADPCT : 6.2 Percent Load Capacity
BATTV : 27.9 Volts
BCHARGE : 100.0 Percent
MBATTCHG : 5 Percent
TIMELEFT : 167.0 Minutes
MINTIMEL : 3 Minutes
SENSE : High
DWAKE : 060 Seconds
DSHUTD : 020 Seconds
LOTRANS : 196.0 Volts
HITRANS : 253.0 Volts
RETPCT : 050.0 Percent
STATFLAG : 0x08 Status Flag
STATUS : ONLINE
ITEMP : 35.1 C Internal
ALARMDEL : Low Battery
LASTXFER : U command or Self Test
SELFTEST : NO
STESTI : 336
DLOWBATT : 02 Minutes
DIPSW : 0x00 Dip Switch
REG1 : 0x00 Register 1
REG2 : 0x00 Register 2
REG3 : 0x00 Register 3
MANDATE : 01/11/99
SERIALNO : GS9903001147
BATTDATE : 01/11/99
NOMOUTV : 230.0
NOMBATTV : 24.0
HUMIDITY : N/A
AMBTEMP : N/A
EXTBATTS : 0
BADBATTS : N/A
FIRMWARE : 60.11.I
APCMODEL : IWI
END APC : Thu Dec 02 17:27:25 CET 1999
You should get pretty much the same output mixed in with html if
you execute upsfstats.cgi directly from a Unix shell in the cgi
subdirectory as explained above for upsstats.cgi and multimon.cgi.
It is possible to run the CGI code to monitor your
UPS using the answerbook HTTP server that runs on Solaris. As long
as your server has the Answerbook2 web server installed and
running, you can insert the cgi scripts into the cgi directory of
the web server, and access the cgi using something like:
http://hostname:8888/cgi/multimon.cgi
Many thanks go to Russell Kroll rkroll@exploits.org who wrote
the CGI programs to work with his UPS Monitoring system named
Network UPS Tools (NUT). Thanks also to Jonathan Benson
jbenson@technologist.com for initially
adapting the upsstatus.cgi program to work with apcupsd.
We have enhanced the bar graph program and hope that our changes
can be useful to the original author in his project.
- apcupsd runs as root.
- If you have NETSERVER ON in your apcupsd.conf file (which is
the default), be aware that anyone on the network can read the
status of your UPS. This may or may not pose a problem. If you
don't consider this information privileged, as is the case for
many, there is little risk. In addition, if you have a perimeter
firewall or NATting router with typical settings only users on your
local network access to your UPS information. You may also restrict
access using using firewall settings (see below) or TCP Wrappers
(see below).
If you are running apcupsd as an NIS server, you will need to
ensure that the clients can reach it by opening up NISPORT
(default: TCP 3551) on any firewall running on the server. You may
wish to configure your firewall(s) to only allow connections from
your local network or specifically from the masters, slaves, and
servers as needed.
If your operating system does not support a host based firewall (a
firewall running on the local machine) then you may try to get some
of the functionality of such a firewall with TCP Wrappers. As of
apcupsd version 3.8.2, TCP Wrappers are implemented if you turn
them on when configuring ./configure --with-libwrap. With
this code enabled, you may control who may access your apcupsd via
TCP connections (the Network Information Server). This control is
done by modifying the file: /etc/hosts.allow. This code is
implemented but untested. If you use it, please send us some
feedback.
If you have a SmartUPS, there
are depending on the UPS at least 12 different values stored in the
EEPROM that determine how the UPS reacts to various conditions such
as high line voltage, low line voltage, power down grace periods,
etc.
In general, for the moment, we do not recommend that you change
your EEPROM values unless absolutely necessary. There have been
several reported cases of problems setting the Low Transfer
Voltage. Consequently, if at all possible, do not attempt to change
this value.
Sealed Lead Acid (SLA) batteries, otherwise known as Valve Regulated Lead Acid
(VRLA) batteries, were originally known as "dry batteries". When first
introduced in the 1950s, they used a gel electrolyte. The otherwise free acid
was immobilised with a fine silica powder and formed a gel substance.
In the 1970s the technology moved to Absorbed Glass Mat (AGM) where the
separators between the lead plates are made of highly porous micro-fine glass
fibres which absorb and immobilise the acid and prevent it from spilling. A
crack or hole in the casing of a VRLA battery using AGM technology will not
result in a measurable electrolyte spill. Spill containment with VRLA batteries
is therefore not meaningful or appropriate.
AGM has became the preferred VRLA technology for use in standby or float
applications and is used in UPSes in the telecommunications, power, and many
other mission critical industries where the power supply must not be
interrupted. APC UPSes use VRLA batteries. VRLA batteries are designed to
recombine hydrogen and oxygen and emit only extremely small amounts of
hydrogen under normal operating conditions. Normal room ventilation is
sufficient to remove any hydrogen, so special ventilation is not required.
Most brand name UPS batteries should last 3-5 years. Some APC Back-UPS models
may have a shorter battery life expectancy. Refer to the user's manual of your
APC Back-UPS to determine the exact battery life expectancy or contact APC
Technical Support.
Below are some APC guidelines for ensuring optimum battery life expectancy:
- Make sure that you keep your APC UPS in a cool, dry location with plenty of ventilation. Ideally, the temperature where your UPS is kept should not exceed 75 Deg F (24 Deg C). Also, for ventilation purposes, leave roughly one to two inches on each side for proper airflow.
- The optimum operating temperature for a lead acid battery is 25 Deg C (77 Deg F). Elevated temperature reduces longevity. As a guideline, every 8 Deg C (15 Deg F) rise in temperature will cut the battery life in half. A battery which would last for 6 years at 25 Deg C (77 Deg F), will only be good for 3 years if operated at 33 Deg C (95 Deg F). Keep in mind that the battery temperature inside your UPS will always be warmer than the ambient temperature of the location where the UPS is installed.
- Only perform runtime calibrations on your UPS one or two times a year, if necessary. Some of our customers want to check their systems to verify that their runtime is sufficient. However, consistently performing these calibrations can significantly decrease the life expectancy of your battery.
- Do not store batteries for extended periods of time. New batteries can be stored for 6 to 12 months from date of purchase. After this period, the battery should be used or it will lose a great deal of its charge. It is not advisable to store batteries that have already been in use.
- Do not exceed 80 percent of a UPS unit's rated capacity due to the reduction in run time. When you increase your load, your runtime decreases. In the event of a utility power failure, a UPS loaded to full capacity will drain and discharge it's battery quickly and will decrease the life expectancy.
The Smart-UPS detects line voltage distortions such as spikes, notches, dips,
and swells, as well as distortions caused by operation with inexpensive
fuel-powered generators. By default, the UPS reacts to distortions by
transferring to on-battery operation to protect the equipment that you are
plugging into the UPS. Where power quality is poor, the UPS may frequently
transfer to on-battery operation. Battery longevity and service life of the
UPS may be conserved by reducing the sensitivity of the UPS, as long as your
equipment can operate normally under the conditions detailed below. Any type
of voltage disturbance includes; High/Low/No RMS Voltage, Total Harmonic
Distortion(THD), Change in Voltage over Time(dv/dt), Frequency (Hz) out of
tolerance.
- High Sensitivity Mode
- In the event of any type of voltage disturbance, the UPS will transfer to
battery power and watch the AC line until it can transfer back to line. The
transfer time in this mode depends on how far the line voltage deviates from
the sinewave reference.
- Medium Sensitivity Mode
- In the event of a RMS voltage-out-of-tolerance(High/Low/No) and
RMS-rate-of-change disturbances(dv/dt) in the line voltage, the UPS will
transfer to battery power and watch the AC line until it can transfer back to
line. In this mode the transfer times are longer but still within acceptable
limits to insure the continuity of a computer's operation.
- Low Sensitivity Mode
- In the event of a RMS voltage-out-of-tolerance disturbances(High/Low/No)
in the line voltage, the UPS will transfer to battery power and watch the
AC line until it can transfer back to line. In this mode the transfer times
are longer but still within acceptable limits to insure the continuity of a
computer's operation.
To change the sensitivity of the UPS, press the small, white "sensitivity"
button on the rear of the UPS. Use a pointed object (such as a pen) to do so.
The default setting is "high"; press the button once to set the sensitivity to
"medium", and press it again to set it to "low"; pressing it a third time will
set it back to "high". The sensitivity setting change will take effect
immediately. The green LED next to the button is a sensitivity setting
indicator - brightly lit is "high" sensitivity, dimly lit is "medium", and
off is "low" sensitivity.
The battery charge graph LEDs on the front panel of a Smart-UPS will flash
in unison when the UPS is operating online and the runtime remaining
(calculated by the Smart-UPS microprocessor) is less than two minutes
more than the low battery signal warning time (minimum of two minutes).
This would usually indicate that you need to either decrease the load
or install new batteries. If the batteries are new, then you need to perform
a runtime calibration (see below).
At a pinch, you could also decrease the low battery warning time. There are
four possible settings: 2, 5, 7, or 10 minutes.
If you own your UPS for long enough, you will inevitably need to replace
the UPS battery or battery cartridge. An APC battery cartridge comprises
two batteries physically stuck together with double-sided tape and wired
in series.
After the decision to replace the batteries, you will face
another decision almost immediately: whether to purchase genuine APC
replacement batteries or not. There are pros and cons to purchasing
genuine replacement APC batteries.
APC Battery Pros
- APC batteries are supported by APC
- APC batteries come with all the necessary hardware
- APC batteries come as pre-made cartridges
- APC batteries will physically fit your UPS
APC Battery Cons
- APC batteries cost up to 4 times the cost of third party batteries
There are also pros and cons to purchasing third party batteries.
Third Party Battery Pros
- A third party battery may cost up to 1/4 the price of APC batteries
- A third party battery may have a higher capacity for the same physical size
Third Party Battery Cons
- You will need to recycle your battery hardware (cables, connectors etc)
- You will need to create your own battery cartridges (with double-sided tape)
- You will need to ensure the third party battery is the right physical size
- You will need to ensure the third party battery is the right capacity
- Use of a third party battery will void APC's Equipment Protection Policy
- Use of a third party battery may void UL, CSA, VDE, and other safety certifications (according to APC)
If you do decide to use third party replacement batteries, please do not
choose the cheapest available generic SLA batteries. These batteries will,
almost without exception, not last as long as brand name
batteries and will need replacing within 12-18 months instead of 3-5 years.
Even when using brand name replacement batteries, make sure that you choose
the UPS version (aka "standby") which may cost slightly more,
but which will last significantly longer in typical UPS usage (long periods
of standby punctuated with infrequent deep discharges).
The brands of battery found in genuine APC battery cartridges have included:
Panasonic and B&B Battery (aka Best & Best Battery and BB Battery). Yuasa
(aka Genesis) is also a recommended brand, albeit a bit on the pricey side.
Note: When substituting a third party battery with a higher capacity than
the original, make sure that it still physically fits in the UPS casing. If the
battery does not fit, do not be tempted to install it "externally". The UPS
may not be able to charge it in a timely manner and/or it may damage the UPS
charging circuitry without appropriate modifications which are generally
beyond an end user's capability.
Although you can do a hot swap of your batteries while the computer and
any other connected equipment is running, it may not be very satisfactory
because the UPS will not always detect that the batteries have been swapped
and apcupsd will continue to report "Low Battery".
There are several ways to correct this situation:
1. If you have a "smart" UPS model, you can force a self-test to make the
UPS notice that the battery has been replaced.
2. If after a self-test, the UPS does not detect that the battery has been
replaced, you can use apctest to do a soft battery runtime calibration.
For details of doing this, refer to the "Soft" Runtime Calibration section
below.
3. If after the soft battery runtime recalibration, the UPS does not detect
that the battery has been replaced, you will need to do a manual battery
runtime calibration. For details of doing this, refer to the "Manual" Runtime
Calibration section below.
A runtime calibration causes the UPS to recalculate its available runtime
capacity based on its current load.
Caution: a runtime calibration will deeply discharge the UPS batteries, which
can leave a UPS temporarily unable to support its equipment if a utility power
failure occurs. Frequent calibrations reduce the life of batteries. APC
recommends performing a runtime calibration only annually, semiannually, or
whenever the load on the UPS is increased.
In order to perform a "soft" runtime calibration it is necessary to wait for
the UPS to recharge its batteries to 100% capacity. Once this has been done,
you can then initiate a runtime calibration through apctest.
APC Documentation Notes:
1. In order for the calibration to be accurate, the output load has to be more
than 40% (some APC documentation recommends at least 30%). Also, it
is advisable not to increase or reduce the load when the UPS is calibrating
its run time.
2. Under no circumstances should the UPS be turned off during a run time
calibration procedure! Once initiated, the calibration must be allowed to run
until completion.
3. The run time calibration procedure is not necessary nor advisable for a new
UPS. Only old UPSes with batteries that are not subject to discharge for long
periods of time should be allowed to perform a run time calibration.
4. Matrix-UPS and Smart-UPS recalculate the runtime-related parameters every
time the UPS goes on battery.
When doing a runtime calibration with "older" batteries, APC Technical Support
recommend doing a complete discharge and recharge first.
If you have "dumb" UPS (aka simple signalling) like a Back-UPS, then your only
option is to do a manual runtime calibration.
Most of the information in this section is taken from APC's website.
Any non-APC additions have been inserted in square brackets.
For a "smart" or "smart signalling" Back-UPS Pro or Smart-UPS:
Perform a Runtime Calibration. This is a manual procedure and
should not be confused with the runtime calibration performed
through PowerChute plus [or apctest]. The batteries inside of the
Smart-UPS are controlled by a microprocessor within the UPS.
Sometimes it is necessary to reset this microprocessor, especially
after the installation of new batteries. Stop the PowerChute plus
[or apcupsd] software from running and disconnect the serial cable.
There must be at least a 30% load attached to the UPS during this
procedure, but the process will cause the UPS to shut off and cut
power to its outlets. Therefore, attach a non-critical load to the
UPS and then force the UPS on battery by disconnecting it from
utility power [suggest not disconnecting, but simply turning off
utility power thereby preserving earthing]. Allow the unit to
run on battery until it turns off completely. Make sure a 30% load
is present! Plug the UPS back into the wall outlet [switch utility
power back on] and allow it to recharge (it will recharge more quickly
turned off and with no load present). Once the unit has recharged,
the "runtime remaining" calculation should be more accurate.
Remember that if the unit is an older model, then the runtime will
not improve significantly.
Background:
An APC Smart-UPS has a microprocessor which calculates runtime
primarily based on the load attached to the UPS and on its battery
capacity. On the right side of the front display panel there is a
vertical graph of five LEDs. Each LED is an indication of battery
charge in increments of twenty percent: 20, 40, 60, 80, 100%
(bottom to top). For example, if the battery charge is 99%, then
only four of the five LEDs are illuminated.
To ensure that an operating system receives a graceful shutdown
when using PowerChute plus or a SmartSlot accessory, an alert is
generated by the Smart-UPS indicating that the UPS has reached a
low battery condition. The alert is audible (rapid beeping), visual
(flashing battery LED or LEDs), and readable through the graphical
interface of PowerChute plus software (or a native UPS shutdown
program within a particular operating system.) In order to
calculate this "low battery condition," all Smart-UPS products have
a preconfigured low battery signal warning time of two minutes
(this is the factory default setting). There are a total of four
user-changeable settings: 2, 5, 7, or 10 minutes. If the low
battery signal warning time is set for 2 minutes, then the alerts
will activate simultaneously two minutes prior to shutdown.
Similarly, if the total runtime for a particular UPS is 30 minutes
with a low battery signal warning time set at 10 minutes, then the
UPS will run on battery for 20 minutes before the low battery alert
begins.
Total runtime is primarily based on two factors, battery capacity
and UPS load. UPS load and runtime on battery are inversely
proportional: as load increases, battery runtime decreases and vice
versa. When utility power is lost, the UPS begins discharging the
battery in order to support the attached load. Once power returns,
the Smart-UPS will automatically begin to recharge its battery.
For a Matrix UPS:
It is unnecessary to subject a battery bank to an excessively long
calibration. Remove battery packs or increase the load (space heaters
are good dummy loads) to obtain a reasonable time length for the
calibration (under an hour if possible).
At the start of a calibration, the Matrix microprocessor saves the
Estimated Run Time displayed.
The unit will then go to battery power until the capacity is 25%. After
this run time has been completed, the original Estimated Run Time is compared
with the actual run time. It will then increase or decrease this value to
correspond to the new run time achieved. If, at any time during the discharge,
one of the following rules is violated the calibration will be aborted or
corrupted:
- Battery capacity must be 100% at start of calibration (all packs must indicated as float).
- Initial "Estimated Run Time" must not exceed 128 minutes (remove battery packs if necessary).
- Load must be above 25%.
- Load must not fluctuate more than ± 5%.
- The UPS must be allowed to run down to 25% battery capacity. PowerChute [or apcupsd] and Accessories must be removed since they can abort the calibration prematurely.
For a "dumb" or "simple signalling" UPS (eg a Back-UPS):
This could be done if you have changed your equipment load or battery.
Stop the PowerChute [or apcupsd] software from running; disconnect the
serial cable between the computer and UPS. Next unplug the UPS from the
wall [suggest not disconnecting but simply turning off the utility power
thereby preserving the earthing] and let it run on battery until it
reaches low battery. Once it reaches low battery plug it back into
the wall outlet [turn the utility power back on] and let it recharge.
Recharge time can take up to 4 hours.
In some cases none of the battery runtime calibration methods result in
the UPS reporting a reasonably correct battery runtime. It has been
speculated that this is because the battery constant value has drifted
so far from normal that the microprocessor in the UPS cannot correct it.
The good news is that if you are located in the USA, all you have to do
is contact APC Technical Support and they will send you a serial port
dongle which plugs into the serial port of your UPS and reprograms the
battery constant value for you to the correct value.
The bad news is that for many users outside the USA, this service does not
appear to be available. It is, however, recommended that you first try
contacting APC Technical Support to verify the correct battery constant
value. The APC representatives in the Support Forum on the APC website
are also very helpful in this regard.
If all else fails, the information below is for you.
WARNING: Only the values for the Smart-UPS 700 model SU700 and
Smart-UPS 1400 model SU1400, both with international firmware (and
therefore international voltage), have been verified. YOU, gentle reader,
USE THIS INFORMATION AT YOUR OWN RISK in the full knowledge that you
may render your UPS inoperable and perhaps irreparable, and you will
have no-one to blame but yourself. Caveat Utilitor!
The battery constant is the hex number in the column labelled "0",
presumably for register 0, in the following table:
UPS Model 4 5 6 0 Hex Firmware
SU250 EE F8 B1
SU400 EE F8 9F E1
SU600 EA F4 9F E5
SU900 F3 FC 9F ED
SU1250 EE FA 9F F5
SU2000 F1 F9 9F FD
SU450,700 28 F2 FA 96 07,RM=47 52.11.I
SU450XL,700XL 28 EE F8 9F 700XL=27 51.9.I
SU1000,INET 35 EF F9 A0 0B 60.11.I
SU1000XL 34 EE FC 9A 2B 61.9.I
SU1400 35 EE FC 9A 70.11.I
SU1400RM 28 ED FA 89
SU1400R2IBX135 08 B4 10 A3
SU1400RMXLI3U 45 F6 F4 80 73.x.I
SU1400RMXLI3U 20 F3 FD 81 73.x.I
SU2200I 35 EE FB AF 90.14.I
SU2200XL,3000 35 EE FB AF 3000=17 90.14.I
SU3000RMXLI3Ublk 35 F3 F4 AF 77 93.14.I
SU5000I white 20 F2 FA 91 1F 110.14.I
SU1400XL,XLI,RM 45 F6 E4 80
SU420I 25 95 09 85 16 21.7.I
SU420SI 0E 95 0A 8C
SU620I 29 99 0B 8A 1A
BP420SI 0E 95 0A 8C 06 11.2.I
BP650SI 10 97 0C 91 0A 12.3.I
Power Stack 250 0C 95 0F B2 26.5.I
Power Stack 450 0D 96 10 99 36 26.5.I
SC250RMI1U 0C 95 0F B3 32 735.a.1
SC420I 0E 95 OA 8C 16 725.1.I
SC620I 10 97 OB 99 1A 726.x.I
SC1000I 08 95 10 94 8A 737.x.I
SC1500I 07 95 14 8F 1E 738.x.I
SU1000XL 17 EE F9 D5
MATRIX 3000,5000 E9 F5 B0
SU700RMI2U 07 B1 0D 92 8A 152.4.I
SU1000RMI2U 08 B5 0D C7 8E 157.3.I
SU1400RMI2U 08 B4 10 A3 92 162.3.I
SUA1000I 07 B5 13 BC 0A 652.12.I
SUA1000XLI 0B BD 0F 7F 4A 681.13.I
SUA750XLI 0A B9 0C 86 46 630.3.I
SUA750I 04 B6 14 82 06 651.12.I
SUA750RMI2U 07 B1 0D 82 86 619.12.I
SUA1500I 09 B9 13 A1 0E 601/653.x.I
SUA1500RMI2U 08 B4 10 A1 8E 617.3.I
SUA2200I 08 B8 12 B3 26 654.12.I
SUA2200RMI2U 09 BC 11 81 A6 665.4.I
SUA2200XLI 0A B7 0F 7F 66 690.x.I
SUA3000RMI2U 04 B9 0E 70 AA 666.4.I
SUA3000RMXLI3U 0A B6 0E 89 xx xxx.x.x
SUOL1000I 06 B6 1B A6
SUOL2000XL 0D BD 14 75 52 416.5.I
SURT1000XLI 0A BB 19 A8 4E 411.x.I
SURT3000XLI 06 B6 0F CC 56 450.2.I
SURT5000XLI 05 BA 15 86 5A 451.13.W
SURT7500XLI 03 BB 20 97 63
SURT10000XLI 06 B8 19 AB 476.12.W
SUM1500RMXLI2U 03 B7 0D A5 62 716.3.I
SUM3000RMXLI2U 03 B7 0D A5 6A 715.3.I
BP500AVR 26 17.1.I
The instructions for resetting the battery constant are as follows:
- Shutdown the apcupsd daemon;
- Run apctest;
- Choose option 6 to enter terminal mode;
- Enter Y (UPS should respond SM);
- Enter 1 (one, not el; wait 4 seconds);
- Enter 1 (one, not el; UPS should respond PROG);
- Enter 0 (zero, not oh; UPS should respond with current constant);
- Write down the existing value so that if something goes wrong, you can at least put it back to that value;
- Enter + (plus) or - (minus) to increment/decrement the value;
- Enter R to reprogram constant value (UPS should respond Bye);
- Enter Y (UPS should respond SM);
- Enter 0 (zero, not oh; UPS should respond with the new constant);
- Enter Esc to exit terminal mode;
- Choose option 7 to exit apctest.
When apcupsd detects anomalies from your UPS device, it will make
some decisions that usually result in one or more calls to the
script located in /etc/apcupsd/apccontrol. The apccontrol file
is a shell script that acts on the first argument that apcupsd
passes to it. These actions are set up by default to sane behavior
for all situations apcupsd is likely to detect from the UPS.
However, you can change the apccontrol behavior for every single
action.
To customize, so create a file with the same name as the action,
which is passed as a command line argument. Put your script in the
/etc/apcupsd directory.
These events are sent to the system log, optionally sent to the
temporary events file (/etc/apcupsd/apcupsd.events), and they also
generate a call to /etc/apcupsd/apccontrol which in turn will call
any scripts you have placed in the /etc/apcupsd directory.
Normally, /etc/apcupsd/apccontrol is called only by apcupsd.
Consequently, you should not invoke it directly. However, it is
important to understand how it functions, and in some cases, you
may want to change the messages that it prints using wall. We
recommend that you do so by writing your own script to be invoked
by apccontrol rather than by modifying apccontrol directly. This
makes it easier for you to upgrade to the next version of apcupsd
In other case, you may want to write your own shell scripts that
will be invoked by apccontrol. For example, when a power fail
occurs, you may want to send an email message to root.
To write your own routine for the powerout action, you create
shell script named powerout and put it in the lib directory
(normally /etc/apcupsd). When the powerout action is invoked by
apcupsd, apccontrol will first give control to your script. If you
want apccontrol to continue with the default action, simply exit
your script with an exit status of zero. If you do not want
apccontrol to continue with the default action, your script should
exit with the special exit code of 99. However, in this case,
please be aware that you must ensure proper shutdown of your
machine if necessary.
Some sample scripts (onbattery and mainsback) that email power
failure messages can be found in /etc/apcupsd after an install or
in the platforms/etc directory of the source code.
When apcupsd detects an event, it calls the apccontrol script with
four arguments as:
apccontrol event ups-name connected powered
where:
- event
- is the event that occurred and it may be any one
of the values described in the next section.
- ups-name
- is the name of the UPS as specified in the
configuration file (not the name in the EEPROM).
- connected
- is 1 if apcupsd is connected to the UPS
via a serial port (or a USB port). In most configurations, this
will be the case. In the case of a Slave machine where apcupsd is
not directly connected to the UPS, this value will be 0.
- powered
- is 1 if the computer on which apcupsd is
running is powered by the UPS and 0 if not. At the moment, this
value is unimplemented and always 0.
The following event names are supported:
- annoyme
When a shutdown is scheduled, and the time
specified on the ANNOYME directive in the apcupsd.conf file
expires, this event is generated.
Default: wall a message
- changeme
When apcupsd detects that the mains are on,
but the battery is not functioning correctly, this event is
generated. It is repeated every x hours.
Default: wall a message
- commfailure
This event is generated each time the
communications line with the computer is severed. This event is not
detected on dumb signaling UPSes.
Default: wall a message
- commok
After a commfailure event is issued, when the
communications to the computer is re-established, this event will
be generated.
Default: wall a message
- doreboot
This event is depreciated and should not be used.
Default: Shuts down the system using shutdown -h or similar
- doshutdown
When the UPS is running on batteries and
one of the limits expires (time, run, load), this event is
generated to cause the machine to shutdown.
Default: Shuts down the system using shutdown -h or similar
- emergency
Called for an emergency system shutdown. (What triggers such a shutdown
is unclear...) After completing this event, apcupsd will immediately
initiate a doshutdown event.
Default: wall a message
- failing
This event is generated when the UPS is
running on batteries and the battery power is exhausted. The event
following this one will be a shutdown.
Default: wall a message
- loadlimit
This event is generated when the battery
charge is below the low limit specified in the apcupsd.conf file.
After completing this event, apcupsd will immediately
initiate a doshutdown event.
Default: wall a message
- powerout
This event is generated immediately when
apcupsd detects that the UPS has switched to batteries. It may be
due to a short powerfailure, an automatic selftest of the UPS, or a
longer powerfailure.
Default: wall a message
- onbattery
This event is generated 5 or 6 seconds
after an initial powerfailure is detected. It means that apcupsd
definitely considers the UPS to be on batteries. The onset of this
event can be delayed by the ONBATTERYDELAY apcupsd.conf
configuration directive.
Default: wall a message
- offbattery
This event is generated when the mains
return only if the onbattery event has been generated.
Default: wall a message
- mainsback
This event is generated when the mains
power returns after a powerout condition. The shutdown event may or
may not have been generated depending on the parameters you have
defined and the length of the power outage.
Default: nothing
- remotedown
This event is generated on a slave
machine when it detects either that the master has shutdown, or
that a onbattery situation exists and the communications line has
been severed.
Default: wall a message
- runlimit
This event is generated when the MINUTES
value defined in the apcupsd.conf file expires while in a power
fail condition. The MINUTES is the remaining runtime as internally
calculated by the UPS and monitored by apcupsd. After completing this
event, apcupsd will immediately initiate a doshutdown event.
Default: wall a message
- timeout
This event is generated when the TIMEOUT value
defined in the apcupsd.conf file expires while in a power fail
condition. It indicates that the total time in a power failure has
been exceeded and the machine should be shutdown. After completing this
event, apcupsd will immediately initiate a doshutdown event.
Default: wall a message
- startselftest
This event is generated when
apcupsd detects a self test by the UPS. Normally due to the 6
second onbattery delay default time, self test events are not
detected.
Default: nothing
- endselftest
This event is generated when the end
of a self test is detected.
Default: nothing
- battdetach
This event is generated when apcupsd
detects that the UPS battery has been disconnected.
Default: nothing
- battattach
This event is generated when apcupsd
detects that the UPS battery has been reconnected after a
battdetach event.
Default: nothing
The following discussion does not apply to Windows servers. Apcupsd on Windows
is limited to a single instance and cannot support monitoring multiple UPSes.
If you have multiple UPSes in use, you may wish to consolidate the monitoring
of all of these UPSes onto a single machine, which we shall call the "UPS
server". Generally one of the UPSes is powering the "UPS server" itself (and
possibly other machines as well). The remaining UPSes are powering additional
machines.
Apcupsd can work quite well in this environment by running one instance of
apcupsd on the UPS server for each UPS to be controlled. That is, you install
a single copy of apcupsd but launch it multiple times using different
configuration files and scripts. (Older versions of apcupsd required you to
actually compile the daemon multiple times with different configure options.
This is no longer required, as all necessary adjustments can be made in
apcupsd.conf.)
Additionally, you will run one instance of apcupsd on each of the machines
you wish to be shut down. You will configure each of these apcupsd's to use
the 'net' driver to read UPS status from the proper instance of apcupsd on the
UPS server. See NIS Server/Client Configuration Using the Net Driver for
more information on the 'net' driver and setting up net clients.
There are many ways one could set up multiple apcupsd instances. Here I will
present the way I have used with great success on Red Hat Linux.
I have two apcupsd.conf files (this is for a 2 UPS setup, easily
expandable to N):
[adk0212@mail apcupsd]$ ls -l /etc/apcupsd/*.conf
-rw-r--r-- 1 root root 11799 Aug 3 08:39 /etc/apcupsd/apcupsd.ups0.conf
-rw-r--r-- 1 root root 11822 Aug 25 14:31 /etc/apcupsd/apcupsd.ups1.conf
In my case, ups0 is the UPS powering the UPS server running the multiple
apcupsd instances, so only ups0 should initiate a shutdown of the local
machine. The differences between the confs are minor since both UPSes
are USB (although that is not a requirement; mixing cable types works
fine too):
[adk0212@mail apcupsd]$ diff -u apcupsd.ups0.conf apcupsd.ups1.conf
--- apcupsd.ups0.conf 2007-08-03 08:39:26.000000000 -0400
+++ apcupsd.ups1.conf 2007-08-25 14:31:17.000000000 -0400
-UPSNAME ups0
+UPSNAME ups1
-DEVICE /dev/ups0
+DEVICE /dev/ups1
-SCRIPTDIR /etc/apcupsd
+SCRIPTDIR /etc/apcupsd/null
-PWRFAILDIR /etc/apcupsd
+PWRFAILDIR /etc/apcupsd/null
-NOLOGINDIR /etc
+NOLOGINDIR /etc/apcupsd/null
-ANNOY 300
+ANNOY 0
-NISPORT 3551
+NISPORT 3552
-EVENTSFILE /var/log/apcupsd.events
+EVENTSFILE /var/log/apcupsd.2.events
The important difference to note is that ups1 has its SCRIPTDIR,
PWRFAILDIR, and NOLOGINDIR set to a special "null" directory that I have
created. This directory contains a copy of the event handling scripts
modified to avoid shutting down the local machine. (Details below). Also
the UPSes are given different EVENTSFILE and NISPORT settings. Plus I
disable the "annoy" feature on ups1. Since the state of that UPS does not
impact local users, there's no reason to annoy them.
I have the following files in the special "null" directory:
[adk0212@mail apcupsd]$ ls -l /etc/apcupsd/null
total 32
-rwxr--r-- 1 root root 4176 Aug 3 08:24 apccontrol
-rwxr-xr-x 1 root root 475 Aug 3 08:28 changeme
-rwxr-xr-x 1 root root 502 Aug 3 08:28 commfailure
-rwxr-xr-x 1 root root 503 Aug 3 08:28 commok
-rwxr--r-- 1 root root 8 Aug 3 08:22 doshutdown
-rwxr-xr-x 1 root root 470 Aug 3 08:27 offbattery
-rwxr-xr-x 1 root root 435 Aug 3 08:27 onbattery
The important change here is the addition of a 'doshutdown' script which
overrides apccontrol's shutdown action:
[adk0212@mail null]$ cat /etc/apcupsd/null/doshutdown
exit 99
The "exit 99" tells apccontrol to skip its normal processing for that
event. apccontrol itself is unchanged; it is a direct copy of the
original. The other scripts are also direct copies and have simply been
modified to generate status email from NISPORT 3552 instead of 3551.
I also have a custom init.d start/stop script to manage multiple
instances. The start, stop, and status handlers are modified to iterate
over all /etc/apcupsd/apcupsd.*.conf files. This is derived from the
standard apcupsd redhat rc script:
#! /bin/sh
#
# apcupsd This shell script takes care of starting and stopping
# the apcupsd UPS monitoring daemon.
#
# chkconfig: 2345 60 99
# description: apcupsd monitors power and takes action if necessary
#
if test -f /etc/whitebox-release ; then
f=/etc/whitebox-release
else
f=/etc/redhat-release
fi
if test `cat $f | grep release |\
cut -f 3 -d ' '`x = "Enterprise"x ; then
DISTVER="Enterprise "`cat $f | grep release |\
cut -f 6 -d ' '`
else
DISTVER=`cat /etc/redhat-release | grep release |\
cut -f 5 -d ' '`
fi
# Source function library
. /etc/rc.d/init.d/functions
case "$1" in
start)
rm -f /etc/apcupsd/powerfail
rm -f /etc/nologin
for conf in /etc/apcupsd/apcupsd.*.conf ; do
inst=`basename $conf`
echo -n "Starting UPS monitoring ($inst):"
daemon /sbin/apcupsd -f $conf -P /var/run/apcupsd-$inst.pid
RETVAL=$?
echo
[ $RETVAL -eq 0 ] && touch /var/lock/subsys/apcupsd-$inst
done
;;
stop)
for conf in /etc/apcupsd/apcupsd.*.conf ; do
inst=`basename $conf`
echo -n "Shutting down UPS monitoring ($inst):"
killproc -p /var/run/apcupsd-$inst.pid apcupsd
echo
rm -f /var/run/apcupsd-$inst.pid
rm -f /var/lock/subsys/apcupsd-$inst
done
;;
restart|force-reload)
$0 stop
sleep 15
$0 start
;;
reload)
echo "$0: reload not implemented"
exit 3
;;
status)
for conf in /etc/apcupsd/apcupsd.*.conf ; do
inst=`basename $conf`
status -p /var/run/apcupsd-$inst.pid apcupsd-$inst
RETVAL=$?
if [ $RETVAL -eq 0 ]
then
NISPORT=`grep ^NISPORT < $conf | sed -e "s/NISPORT *\([0-9]\)/\1/"`
/sbin/apcaccess status localhost:$NISPORT | egrep "(STATUS)|(UPSNAME)"
fi
done
;;
*)
echo "Usage: $0 {start|stop|restart|status}"
exit 1
;;
esac
exit 0
That's about all there is to it. There are still some rough edges to
clean up, but overall this is a lot easier with apcupsd 3.14.x than it
used to be.
To run apcupsd with a SNMP UPS, you need the
following things:
- An SNMP UPS, for example a Web/SNMP (AP9716) or PowerNet SNMP
(AP9605) card installed into the SmartSlot. Apcupsd also has support
for some non-APC SNMP UPSes using RFC1628 or MGE MIBs, however the
majority of the information in this section is for APC UPSes.
SNMP packet requests are relayed to
the UPS from monitoring APCUPSD servers over Ethernet via a switch,
hub, or router. Protecting these Ethernet devices with UPS supplied
power is necessary to ensure reliable SNMP communication during
power failures. Servers may fail to shutdown quietly during power
failures if SNMP communication is lost.
To establish communication to the UPS SNMP card
installed in the UPS, the SNMP card will need the following:
- Assign SNMP card IP Address
- Set SNMP card General Parameters
- Set SNMP card Shutdown Parameters
- Set SNMP card Event Trap Receivers (apcupsd-3.12.0 and later)
The following instructions come from the APC knowledge base:
The Network Management Card (AP9617, AP9618, AP9619) must be
configured with network settings before it can communicate on the
network. Once the cards have been configured with an IP address,
Subnet Mask, and Default Gateway the cards can be access, managed,
and controlled from other computers on the network.
There are two ways to configure the Network Management Card (NMC)
with its initial settings: the (windows) Wizard and Address
Resolution Protocol (ARP).
1. The wizard in included on the CD that comes with the card. The
wizard must run on a Windows operating system. You can configure
the card using the wizard over the network via FTP. If using the
wizard please note, the un-configured NMC must be on the same
subnet as the computer running the wizard.
2. Address resolution protocol (arp) can also be used to configure
the NMC. The MAC Address of the NMC is needed for this method of
configuration. The MAC address is located on the quality assurance
slip that is shipped with the NMC, and is also located on the white
sticker on the NMC itself. From a computer on the same subnet as
the un-configured NMC, follow the instructions:
Open up a command prompt and type the following (replacing
<IPaddress> and <MacAddress> with the actual values):
arp -s <IPaddress> <MacAddress>
Next, use Ping with a size of 113 bytes to assign the IP address
defined by the ARP command.
- Linux command format: ping <IPaddress> -s 113
- Windows command format: ping <IPaddress> -l 113
After the SNMP Network Management Card is configured with an IP address,
the SNMP Card is ready for general configuration. This is accomplished by
telneting to the SNMP Card.
~$ telnet <IPaddress>
Login using "apc" for both the username and password and the
following menu will display:
*******************************************************************************
American Power Conversion Network Management Card AOS v2.6.4
(c) Copyright 2004 All Rights Reserved Smart-UPS & Matrix-UPS APP v2.6.1
-------------------------------------------------------------------------------
Name : Date : 07/03/2006
Contact : Time : 04:43:33
Location : User : Administrator
Up Time : 0 Days 01 Hours 57 Minutes Stat : P+ N+ A+
Smart-UPS 1000 named : On Line, No Alarms Present
------- Control Console -------------------------------------------------------
1- Device Manager
2- Network
3- System
4- Logout
<ESC>- Main Menu, <ENTER>- Refresh, <CTRL-L>- Event Log
>
*******************************************************************************
Select Option 2 for Network. Next select Option 1 for TCP/IP
settings.
At this point the following settings will be to be specified:
- Verify System IP: <IPaddress>
- Specify Subnet Mask: i.e. "225.225.225.0"
- Specify Default Gateway
- Specify Host Name
- Specify Domain Name
Specifying these parameters will complete the General Parameters
setup. Additionally the SNMP Network Management Card can now be
connected to from a web browser for monitoring and additional
configuration.
There are two shutdown parameters that must be set in the SNMP card
to ensure that connected servers shutdown quietly. These parameters
can be set via the telnet terminal or the web browser interface.
- Shutdown Delay (sec)
- Return Battery Capacity (%)
One of the draw-backs of SNMP communication to the UPS is that the
Stand-alone or Primary server must issue the power down command to
the UPS early in server halt procedure. This server must issue an
early command to the SNMP UPS to power down before its ethernet
service is halted. This creates a potential problem where the UPS
may kill power to any connected servers before these affected
servers' halt scripts complete a successful shutdown.
The SNMP Shutdown Delay parameter is used to delay the UPS from
killing power to its load by a prescribed period of seconds. The
delay should be long enough to ensure that the Stand-alone or
Primary server has enough time to successfully halt. The prescribed
time should at least be 180 seconds. Any additional computers
connected to the SNMP UPS must not be configured to issue the
command to initiate UPS power down. These servers can be thought of
as secondary stand-alone server. The APCUPSD daemons of secondary
servers should be configured to initiate server halt a prescribed
period of time before the Primary server issues the UPS power down
command.
The Return on Battery Capacity is useful during intermittent
sequential power failures. This parameter insures that the UPS will
not restore power to its loads until it has recharged it battery to
a prescribed percentage. This parameter should be set to a value
greater than value that the APCUPSD daemons configured
"BATTERYLEVEL" shutdown of any connected servers. This will ensure
that when the UPS restores power, any additional power failures
will successfully re-trigger a server shutdown.
The previous sections describe configuration of the actual SNMP
card. The remaining sections describe configuration of the APCUPSD
to communicate using SNMP Protocol.
To enable the SNMP support it is enough to configure
the correct device in your apcupsd.conf configuration file. The
directive needed for this configuration is:
DEVICE <host>:<port>:<vendor>:<community>
...where the directive is made by four parts. All but the first may be omitted
completely or left empty to accept the default.
host: IP address or DNS hostname of the UPS (required)
port: Remote SNMP port (optional, default: 161)
vendor: The type of SNMP MIB available on the UPS (optional, default:
autodetect). Allowable choices for vendor are:
- APC : APC PowerNet MIB, used on most APC brand UPSes
- RFC : RFC1628 MIB, used by some non-APC UPSes
- MGE : MGE MIB, used by many MGE brand UPSes
- blank : Autodetect
Append "_NOTRAP" to the vendor name to disable SNMP trap catching
(ex: "APC_NOTRAP"). See SNMP Trap Catching.
community: The read-write community string, usually "private". You can
specify a read-only community string, usually "public", if you do not
require killpower support. If the community string is omitted, apcupsd will
attempt to autotedect by trying "private" and "public".
(optional, default: autodetect).
A NIS Server/Client (Master/Slave) configuration
with multiple servers is still applicable. However, an alternative
configuration is possible with an SNMP
enabled UPS. In this arrangement, all connected servers will be
configured as a standalone server. Each will independently
communicate to the UPS. One (primary) server will be chosen to
manage the task of commanding the UPS to power down. All remaining
(secondary) servers will be configured to quietly power down before
the primary server issues the UPS power down command.
Follow the instructions in Building and Installing apcupsd, being sure
to include the following options (in addition to any others you need) on the
'./configure' line:
./configure --enable-snmp
apcupsd-3.11.14 introduces support for SNMP trap catching.
Previous versions polled the UPS status
once per minute, leading to significant delays before UPS state
changes were recognized. With SNMP trap handling, apcupsd monitors
the SNMP trap port and will re-poll the UPS whenever a trap is
received. This happens, for example, when the UPS switches on or
off battery.
In order for this feature to work, you must configure your UPS to
deliver traps to the server running apcupsd. This is generally done
by connecting to your SNMP card via a web browser or telnet
connection. You will need to enter your server's IP address as a
trap receiver and make sure trap delivery is enabled.
Trap catching can lead to problems if you are already running
another SNMP trap daemon on your server. Only one daemon can listen
to the trap port, so whichever one is started first will succeed
and the others will fail. Apcupsd will fall back to polling
behavior if it is unable to open the trap port. You can also
forcibly disable trap catching by appending _NOTRAP to your vendor
string in the apcupsd.conf DEVICE directive.
Currently (as of 3.10.0) the code to power off the UPS needs
special configuration. The killpower command for SNMP UPSes can not
be issued during shutdown as typically at some time during shutdown
operations the network stack is stopped. To overcome this problem
it is needed to modify the /etc/rc.d/apcupsd system control script
to tell apcupsd to issue the power down command (killpower) to the
UPS immediately before apcupsd initiates the system shutdown. For
this reason it is paramount to set your UPS grace time to a value
greater than 120 seconds to allow for clean shutdown operations
before the UPS removes the power from its plugs. To enable correct
shutdown operation during powerdown do the following:
- Connect to your Web/SNMP card using your favorite web browser,
go to the UPS configuration menu and change the "Shutdown Delay"
parameter to 180 seconds or more, depending on how much time your
system shutdown requires to umount all the filesystems.
- Option 1 (non-windows) Edit the server halt script. Relocate
the ups_kill_power() function higher in the shutdown sequence,
primarily before the command to bring down the ethernet service.
This is the preferred method for shutting down the UPS. The UPS
will power down after the prescribed "Shut Down Delay" time (in
seconds) has elapsed.
- Option 2 Change /etc/rc.d/apcupsd script adding the
--kill-on-powerfail to the apcupsd invocation. This method is
not preferred because the UPS is commanded to power down without
delay. This creates the potential for UPS powering down before the
server calling for UPS power down completes its shutdown. However,
in the case of Microsoft Windows OS, this is the only method
available for powering down the UPS.
- Restart your apcupsd
With this setup your UPS operations should be safe.
The apcupsd philosophy is that all logging should be done through the
syslog facility (see: 'man syslog') This is now implemented with
the exceptions that STATUS logging, for compatibility with
prior versions is still done to a file, and EVENTS logging can
be directed to a temporary file so that it can be reported by the
network information server.
apcupsd splits its logging into four separate types called:
- DEBUG
- DATA
- STATUS
- EVENTS
Debug logging consists of debug messages. Normally these are turned
on only by developers, and currently there exist very few of these
debug messages.
This feature is somewhat outdated and not often used.
Data logging consists of periodically logging important data
concerning the operation of the UPS. For the definitive definition
of the format, see log_data() in apcreports.c. The format varies
according to the UPS model and the information available from the
UPS.
For UPS models, NBKPRO, SMART, SHARESMART, and MATRIX, the output
is written in a format very similar to what PowerChute writes. That
is:
MinLineVoltage, MaxLineVoltage, OutputVoltage, BatteryVoltage,
LineFrequency, LoadPercent, UPSTemperature, AmbientTemperature, Humidity,
LineVoltage, BatteryCharge, toggle
Any value that is not supported by your UPS such as
AmbientTemperature and Humidity will be blank or possibly as 0.0.
In any case the commas before and after that field will still be
output. The toggle value alternates from 0 to 1 on each line. This
was added at user request so that no two adjacent samples are
identical.
An actual example from the log file is:
Nov 2 12:43:05 matou apcupsd[23439]: 224.9,227.5,226.2,27.74,50.00,100.0,30.6,,,226.2,50.0,1
Status logging consists of logging all available information known
about your UPS as a series of ASCII records. This information is
also made available by the apcupsd network information server.
For more details on STATUS logging, see the apcupsd Status Logging
section for details.
Events logging consists of logging events as they happen. For
example, successful startup, power fail, battery failure, system
shutdown, ...
See the Customizing Event Handling section for more details.
In order to ensure that the data logged to syslog() can be directed
to different files, I have assigned syslog() levels to each of our
four types of data as follows:
- DEBUG logging has level LOG_DEBUG
- DATA logging has level LOG_INFO
- STATUS logging has level LOG_NOTICE
- EVENTS logging has levels LOG_WARNING, LOG_ERR, LOG_CRIT, and LOG_ALERT
It should be noted that more work needs to be done on the precise
definitions of each of the levels for EVENTS logging. Currently, it
is roughly broken down as follows:
LOG_WARNING general information such as startup, etc.
LOG_ERR an error condition detected, e.g. communications problem
with the UPS.
LOG_CRIT a serious problem has occurred such as power failure,
running on UPS batteries, ...
LOG_ALERT a condition that needs immediate attention such as
pending system shutdown, ...
The default Facility for syslog() logging is DAEMON, although this
can be changed with the FACILITY directive in apcupsd.conf. In the
following example, we should the facility as local0.
More work needs to be done to the code to ensure that it
corresponds to the above levels.
As a practical example of how to setup your syslog() to use the new
logging feature, suppose you wish to direct all DATA logging to a
file named /var/log/apcupsd.data, all EVENTS to the standard
/var/log/messages file (to be mixed with other system messages),
and at the same time send all EVENTS to /var/log/apcupsd.events,
and finally, you want to send all STATUS logging to the named pipe
/var/log/apcupsd.status
First as root, you create the named pipe:
mkfifo /var/log/apcupsd.status
Change its permissions as necessary or use the -m option to set
them when creating the pipe.
Then you modify your /etc/syslog.conf file to direct the
appropriate levels of messages where you want them. To accomplish
the above, my syslog.conf file looks like:
# exclude all apcupsd info by default
*.info;local0.none /var/log/messages
# Everything for apcupsd goes here
local0.info;local0.!notice /var/log/apcupsd.data
local0.notice;local0.!warn |/var/log/apcupsd.status
local0.warn /var/log/apcupsd.events
local0.warn /var/log/messages
The Windows version of apcupsd has been tested on Win95, Win98,
WinMe, WinNT, WinXP, and Win2000 systems. This version of apcupsd
has been built to run natively on Windows (no Cygwin or other
emulation layer needed). Even though the Win32 version of apcupsd
is a port that relies on many Unix features, it is just the same a
true Windows program. When running, it is perfectly integrated with
Windows and displays its icon in the system icon tray, and provides
a system tray menu to obtain additional information on how apcupsd
is running (status and events dialog boxes).
Once installed apcupsd normally runs as a system service. This
means that it is immediately started by the operating system when
the system is booted, and runs in the background even if there is
no user logged into the system.
Normally, you will install the Windows version of apcupsd from the
binaries. Starting with version 3.11.15, the Windows binaries are
distributed with a full GUI installer driven by NSIS, the
Nullsoft Scriptable Install System (http://nsis.sourceforge.net).
Installation is very simple and straight-forward: Simply
double-click the installer executable and follow the instructions.
If you are installing Apcupsd for the first time, the installer
will give you an opportunity to edit the apcupsd.conf configuration
file to contain the values appropriate for your site. (Subsequent
installations will maintain your existing apcupsd.conf, so you need
not edit it again unless there are new features or syntax changes
that must be accounted for.)
The default configuration calls for a USB connected UPS. This is
the most common connection for modern UPSes, especially those used
with Windows computers. All other apcupsd drivers are available
(apcsmart, dumb, net, snmp, pcnet) and can be used simply by
editing the configuration file UPSCABLE, UPSTYPE, and DEVICE
settings as described elsewhere in this manual.
Note that on Windows, serial ports are specified using COM1, COM2,
etc. notation instead of the UNIX-style /dev/tty* notation.
Note also if you are using WinNT or Win2000, the operating system
may probe the serial port attempting to attach a serial mouse. This
will cause apcupsd to be unable to communicate with the serial
port. If this happens, or out of precaution, you can edit the
c:\\boot.ini file. Find the line that looks something like the
following:
multi(0)disk(0)rdisk(0)partition(1)\WINNT="Windows NT Workstation Version 4.00"
and add the following to the end of the line: /NoSerialMice:COM1
(or COM2 depending on what you want to use). The new line should
look similar to...
multi(0)disk(0)rdisk(0)partition(1)\WINNT="Windows NT Workstation Version 4.00" /NoSerialMice:COM1
...where the only thing you have changed is to append to the end of
the line. This addition will prevent the operating system from
interfering with apcupsd
The installer will give you an opportunity start the Apcupsd
service immediately. If you choose to start it manually, you may do
so by selecting the "Start Apcupsd" link from the Start->Programs->Apcupsd
folder.
On Windows NT/2000/XP, you may alternatively go to the Control
Panel, open the Services folder, select Apcupsd UPS Server, and
then click on the Start button as shown below:
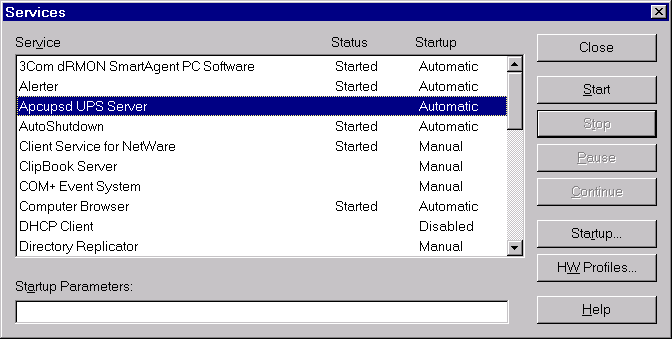
If the Services dialog reports a problem, it is normally because
your DEVICE statement does not contain the correct serial port
name.
You probably should also click on the Startup... button to
ensure that the correct defaults are set. The dialogue box that
appears should have Startup Type set to Automatic* and
**Logon should be set to System Account. If these values are not set
correctly by default, please change them otherwise apcupsd will not
work.
For WinXP and Win2K systems, the dialogs are a bit different from
those shown here for WinNT, but he concept is the same. You get to
the Services dialog by clicking on: Control Panel ->
Administrative Tools -> Component Services. The apcupsd service
should appear in the right hand window when you click on Services
(Local) in the left hand menu window.
That should complete the installation process. When the system tray
icon turns from a question mark  into a plug
into a plug  ,
right click on it and a menu will appear. Select the Events
item, and the Events dialogue box should appear. There should be no
error messages. By right clicking again on the system tray plug and
selecting the Status item, you can verify that all the values
for your UPS are correct.
,
right click on it and a menu will appear. Select the Events
item, and the Events dialogue box should appear. There should be no
error messages. By right clicking again on the system tray plug and
selecting the Status item, you can verify that all the values
for your UPS are correct.
When the UPS switches to the battery, the battery icon  will appear in the system tray. While the UPS is online, if the
battery is not at least 99% charged, the plug icon will become a
plug with a lightning bolt in the middle
will appear in the system tray. While the UPS is online, if the
battery is not at least 99% charged, the plug icon will become a
plug with a lightning bolt in the middle  to indicate that
the battery is charging.
to indicate that
the battery is charging.
Starting with version 3.14.2, the tray icon is provided by a separate
program called 'apctray'. This cleanly separates the user interface
from the daemon (service) and is required for tray icon support on
Windows Vista. Note that if you close or disable the tray icon this
does not stop or disable the apcupsd service which will continue
to monitor the UPS and shutdown the computer when appropriate. To
stop or disable the service, use the service control panel.
apctray has the capability of monitoring multiple apcupsd instances
using apcupsd's Network Information Server (NIS). It will create a
new icon for each instance being monitored. By default, apctray
monitors the local apcupsd (localhost on port 3551). To add
additional monitors, you can right-click an existing icon and choose
"Add Monitor". To remove a monitor, right-click its icon and choose
"Remove Monitor". To change thr settings for an existing monitor
(ip address, port, refresh rate), right-click its icon and choose
"Configure...".
apctray can be installed standalone (without apcupsd) if you wish
to use it only to monitor remote apcupsd instances. This can be
convenient for keeping an eye on a room full of UPSes from your
desktop. Download and run the normal apcupsd installer and simply
uncheck all components except apctray. Then add as many monitors as
you wish as described above.
It would be hard to overemphasize the need to do a full testing of
your installation of apcupsd as there are a number of reasons why
it may not behave properly in a real power failure situation.
Please read the Testing Apcupsd section of this document for
general instructions on testing the Win32 version. However, on
Win32 systems, there is no Unix system log file, so if something
goes wrong, look in the file c:\apcupsd\etc\apcupsd\apcupsd.events
where apcupsd normally logs its events, and you will generally find
more detailed information on why the program is
not working. The most common cause of problems is either improper
configuration of the cable type, or an incorrect address for the
serial port. Additionally, check the application event log, if
you're running a platform that supports it such as Windows 2000 or
XP.
An upgrade may be accomplished by uninstalling the old version
(using the Add/Remove Programs Control Panel or clicking the
"Uninstall Apcupsd" link from Start -> Programs -> Apcupsd. Near the
end of the uninstall you will be prompted about removing
configuration and event files. You should answer "No" in order to
preserve your existing apcupsd.conf file.
After the uninstall completes you may install the new version of
Apcupsd as described above. If you preserved your existing
apcupsd.conf file, the new apcupsd.conf will be installed as
apcupsd.conf.new.
After installing
apcupsd and before running it, you should check the contents of the
config file c:\apcupsd\etc\apcupsd\apcupsd.conf. You will
probably need to change your UPSCABLE directive, your UPSTYPE and
possibly your DEVICE directives. Please refer to the configuration
section of this manual for more details.
On some Windows systems, the
domain resolution does not seem to work if you have not configured
a DNS server in the Network section of the Control Panel. This
problem should be apparent only when running a slave configuration.
In this case, when you specify the name of the master in your
apcupsd.conf file, apcupsd will be unable to resolve the name to a
valid IP address. To circumvent this problem, simply enter the
address as an IP address rather than a hostname, or alternatively,
ensure that you have a valid DNS server configured on your system.
On WinNT, WinXP, and Win2K systems, you can examine the System
Applications log to which apcupsd writes Windows error messages
during startup.
Regardless of which Windows system you are running, apcupsd logs
most error messages to c:\apcupsd\etc\apcupsd\apcupsd.events.
This type error messages such as configuration
file not found, etc are written to this file. Note that on some
systems (WinXP, possibly others) Apcupsd is unable to write to this
file when running as a service.
It is possible to receive email notification of apcupsd events
using some simple Visual Basic scripts contributed by Ed Dondlinger
<edondlinger@thepylegroup.com>. The scripts are automatically installed in
the etc/apcupsd directory of your apcupsd installation but are disabled
by default. To enable them, first open them in a text editor such as Notepad
and edit the USER VARIABLES section to set your email preferences including
address, server information, etc. Then rename the script files without the
*.example suffix. Scripts are supplied for onbattery, offbattery, and
commfailure events. You can copy the scripts to other filenames and modify
the email body text to respond to other events as described in Customizing
Event Handling.
If your batteries become
exhausted during a power failure and you want your machine to
automatically reboot when the power comes back, it is useful to
implement the killpower feature of the UPS where apcupsd sends the
UPS the command to shut off the power. In doing so, the power will
be cut to your PC and if your BIOS is properly setup, the machine
will automatically reboot when the power comes back. This is
important for servers.
This feature is implemented on Unix systems by first requesting a
system shutdown. As a part of the shutdown, apcupsd is terminated
by the system, but the shutdown process executes a script where
apcupsd is recalled after the disks are synced and the machine is
idle. Apcupsd then requests the UPS to shut off the power
(killpower).
Unfortunately on Windows, there is no such shutdown script that we
are aware of and no way for apcupsd to get control after the
machine is idled. If this feature is important to you, it is
possible to do it by telling apcupsd to immediately issue the
killpower command after issuing the shutdown request. The danger in
doing so is that if the machine is not sufficiently idled when the
killpower takes place, the disks will need to be rescanned (and
there is a possibility of lost data however small). Generally,
UPSes have a shutdown grace period which gives sufficient time for
the OS to shutdown before the power is cut.
To implement this feature, you need to add the -p option to the
apcupsd command line that is executed by the system. Currently the
procedure is manual. You do so by editing the registry and changing
the line:
c:\apcupsd\apcupsd.exe /service
found under the key:
HKEY_LOCAL_MACHINE Software\Microsoft\Windows\CurrentVersion\RunServices
to
c:\apcupsd\apcupsd.exe /service -p
If you have a Smart UPS, you can configure the kill power grace
period, and you might want to set it to 3 minutes. If you have a
dumb UPS, there is no grace period and you should not use this
procedure. If you have a Back-UPS CS or ES, these UPSes generally
have a fixed grace period of 2 minutes, which is probably
sufficient.
Our philosophy is to shutdown
a computer but not to power it down itself (as opposed to having
the UPS cut the power as described above). That is we prefer to
idle a computer but leave it running. This has the advantage that
in a power fail situation, if the killpower function described
above does not work, the computer will continue to draw down the
batteries and the UPS will hopefully shutoff before the power is
restore thus permitting an automatic reboot.
Nevertheless some people prefer to do a full power down. To do so,
you might want to get a copy of PsShutdown, which does have a power
down option. You can find it and a lot more useful software at:
http://technet.microsoft.com/en-us/sysinternals/bb897541.aspx. To use their shutdown
program rather than the apcupsd supplied version, you simply edit:
c:\apcupsd\etc\apcupsd\apccontrol
with any text editor and change our calls to shutdown to
psshutdown.
These options are not normally
seen or used by the user, and are documented here only for
information purposes. At the current time, to change the default
options, you must either manually run apcupsd or you must manually
edit the system registry and modify the appropriate entries.
In order to avoid option clashes between the options necessary for
apcupsd to run on Windows and the standard apcupsd options, all
Windows specific options are signaled with a forward slash
character (/), while as usual, the standard apcupsd options are
signaled with a minus (-), or a minus minus (--). All the
standard apcupsd options can be used on the Windows version. In
addition, the following Windows only options are implemented:
|
/service |
Start apcupsd as a service |
|
/run |
Run the apcupsd application |
|
/install |
Install apcupsd as a service in the system registry |
|
/remove |
Uninstall apcupsd from the system registry |
|
/about |
Show the apcupsd about dialogue box |
|
/kill |
Stop any running apcupsd |
|
/help |
Show the apcupsd help dialogue box |
It is important to note that under normal circumstances the user
should never need to use these options as they are normally handled
by the system automatically once apcupsd is installed. However, you
may note these options in some of the .pif files that have been
created for your use.
If you have a UPS that communicates via
serial port, you need to do two things before you can even think
about configuring the software. First, you need to figure out
whether it's a dumb (voltage-signalling) UPS or speaks the apcsmart
protocol. Second,
if you have an interface cable from APC, you need to figure out
what kind it is. If you don't have such a cable, you need to build
one. A straight-through serial cable won't work.
According to Bill Marr the Belkin F5U109, also sold as F5U409 also
works with apcupsd for kernel versions 2.4.25 or higher and kernels
2.6.1 and higher. These newer kernels are needed to have the patch
that makes the mct_u232 (Magic Control Technology) module and
other adapters work with RS-232 devices that do not assert the CTS
signal.
By using a special adaptor, you can
connect your serial-line UPS to a USB port. If you would like to
free up your serial port and connect your existing serial port UPS
to a USB port, it is possible if you have one of the later kernels.
You simply get a serial to USB adapter that is supported by the
kernel, plug it in and make one minor change to your apcupsd.conf
file and away you go. (Kern adds: Thanks to Joe Acosta for pointing
this out to me.)
The device that Joe Acosta and Kern are using is IOgear GUC232A USB
2 serial adapter. Bill Marr informs us that it also works with a
Back-UPS Pro 650 and the 940-0095B cable.
At Kern's site, running Red Hat 7.1 with kernel 2.4.9-12, he simply
changed his /etc/apcupsd/apcupsd.conf configuration line to be:
DEVICE /dev/ttyUSB0
Depending on whether or not you have hotplug working, you may
need to explicitly load the kernel modules usbserial and
pl2303. In Kern's case, this was not necessary.
If you have a serial-line UPS, there are some tests you should run
before the general ones described in the Testing Apcupsd section.
To test your computer's connection with a serial-line UPS, you
first need to establish that the serial line is functioning, and
then that the UPS is responding to commands. This can be a bit
tricky, especially with a dumb voltage-signalling interface,
because it is completely quiescent when there are no commands being
passed, and the command repertoire doesn't include any self-tests.
Because it is easy to configure a serial cable incorrectly in such
a way as to cause premature shutdowns of the UPS power, we
strongly recommend, especially for voltage- signaling (dumb)
UPSes, that you do most of the initial testing with your computer
plugged into the wall rather than your UPS. Thus if the UPS power
is suddenly shut off, your computer will continue to run. We also
recommend using safe-apccontrol as described below, until you are
sure that the signaling is correct.
Also note that if you launch the execution of apcupsd while your
voltage-signaling UPS is on battery power, it is very likely that
your UPS will immediately shut off the power. This is due to the
initialization of the serial port line signals, which often looks
to the UPS like a shutdown command.
Finally, double-check the state of your cabling and UPS indicator
lights frequently during testing. For voltage-signaling UPSes,
apcupsd is not currently able to detect whether or not the serial
cable is connected. In addition, some simple signaling UPSes with
certain cable combinations are not able to detect the low battery
condition. For more details please see Voltage Signalling Features
Supported by Apcupsd for Various Cables.
Once you have compiled, installed,
and invoked apcupsd, you should wait to allow apcupsd to configure
itself and establish contact with the UPS.
If you see a message similar to the following about 30 seconds after starting
apcupsd...
apcupsd FATAL ERROR in apcserial.c at line 156
PANIC! Cannot communicate with UPS via serial port.
it means that apcupsd tried for about 30 seconds to establish
contact with the UPS via the serial port, but was unable to do so.
Before continuing, you must correct this problem. Some of the
possible sources of the problem are:
- You have not configured the correct serial port name on the
DEVICE directive in your apcupsd configuration file.
- The serial port that you have chosen has logins enabled. You
must disable logins on that port, otherwise, the system prevents
apcupsd from using it. Normally, the file /etc/inittab specifies
the ports for which a getty process is started (on Sun machines,
the serial port program equivalent to getty is called ttymon). You
must disable this for the port that you wish to use.
- Make sure you are doing your testing as root otherwise, you
may have permissions problems accessing the serial port.
- You may have cabling problems, either with an incorrect cable,
or the incorrect cable specification directive in the configuration
file.
- You may have a problem with the /etc/apcupsd/acpupsd.conf file.
For example, check that you have specified the correct type of UPS
and the correct networking directives. For more details, see the
After Installation section.
- If you have a SmartUPS 5000 RM 15U or similar model, that comes
with a "Web/SNMP management card" in one of the "Smart Slots", this
card may interfere with the serial port operation. If you are
having problems, please remove this card and try again. Supposedly
V3.0 of the card firmware has been corrected to properly release
the serial port.
- Ensure that you have no other programs that are using the serial
port. One user reported that he had problems because the serial
port mouse (gpm) was using the same port as apcupsd. This causes
intermittent seemingly random problems.
- Try connecting your UPS to another machine. If it works, then
you probably have a bad serial port card. As unlikely as this may
sound, at least two of our users have had to replace bad serial
port cards.
- Try doing an 'lsof /dev/ttyS0' where you replace the
/dev/ttyS0 with your serial port name. If you get no output, the
port is free (or there is no physical port). If you get output,
then another program is using the port, and you should see which
one.
- Try doing a 'dmesg | grep tty'. This may show you if a program
has grabbed the port. (Thanks to Joe Acosta for the suggestion.)
- If all else fails, make sure your system is configured for
serial port support.
The first thing to do is to look at your log file, usually
/var/log/messages because apcupsd writes more detailed information
to the log file whenever there is an error.
If you have a UPS that uses apcsmart protocol, you can manually test the
serial communications with the UPS by starting a serial port communications
program (such as minicom, tip, or cu) with the settings 2400 8N1 (2400 baud,
8 data bits, no parity, 1 stop bit). Be extremely careful what you send to
your UPS as certain characters may cause it to power down or may
even cause damage to the UPS. Try sending an upper case Y to the
UPS (without a return at the end). It should respond with SM. If
this is not the case, review the possible problems listed above. If
you fat finger the Y and enter y instead, no cause for alarm, you
will simply get the APC copyright notice.
Once you are sure that serial port communications is working,
proceed to the next test.
Once you have established that apcupsd can talk
to the UPS over the serial part, go do the series of functional
tests described in the main Testing section (see Testing Apcupsd).
The most frequently encountered problem with voltage-signalling
UPSes (e.g. BackUPS 650) is that you have incorrectly specified
which cable is being used. All cables furnished by APC have the
cable number stamped on the side of the computer connector end of
the cable. Using this number with apcupsd will normally work fine.
If you do not know what cable you have, you can use the apctest
program to determine the type of the cable.
For simple signaling UPSes, you should not use simple in the
cable specification (i.e. UPSCABLE simple) unless you have made
the cable yourself according to the wiring diagram given in the
cables chapter of this manual.
In one case, a user reported that he received random incorrect
values from the UPS in the status output. It turned out that gpm,
the mouse control program for command windows, was using the serial
port without using the standard Unix locking mechanism. As a
consequence, both apcupsd and gpm were reading the serial port.
Please ensure that if you are running gpm that it is not configured
with a serial port mouse on the same serial port.
You can either use the cable that came with your
UPS (the easiest if we support it) or you can make your own cable.
We recommend that you obtain a supported cable directly from APC.
If you already have an APC cable, you can determine what kind it is
by examining the flat sides of the two connectors where you will
find the cable number embossed into the plastic. It is generally on
one side of the male connector.
To make your own cable you must first know whether you have a UPS
that speaks the apcsmart protocol or a "dumb" UPS that uses serial
port line voltage signalling.
If you have an smart UPS, and you build your own cable, build a Smart-Custom
cable (see Smart-Custom Cable for SmartUPSes). If you have a
voltage-signalling or dumb UPS, build a Simple-Custom cable (see
Simple-Custom Voltage-Signalling Cable for "dumb" UPSes). If you have a
BackUPS CS with a RJ45 connector, you can build your own Custom-RJ45 cable
(see Custom-RJ45 Smart Signalling Cable for BackUPS CS Models).
You do not have this cable unless you built it yourself.
The Smart-Custom cable is not an APC product.
SMART-CUSTOM CABLE
Signal Computer UPS
DB9F DB9M
RxD 2 -------------------- 2 TxD Send
TxD 3 -------------------- 1 RxD Receive
GND 5 -------------------- 9 Ground
When using this cable with apcupsd specify the following in
apcupsd.conf:
UPSCABLE smart
UPSTYPE apcsmart
DEVICE /dev/ttyS0 (or whatever your serial port is)
If you have an OS that requires DCD or RTS to be set before you can
receive input, you might try building the standard APC Smart
940-0024C cable listed below (see 940-0024C Cable Wiring).
You do not have this cable unless you built it yourself.
The Simple-Custom cable is not an APC product.
For "dumb" UPSes using voltage signalling, if you are going to
build your own cable, we recommend to make the cable designed by
the apcupsd team as follows:
SIMPLE-CUSTOM CABLE
Signal Computer UPS
DB9F 4.7K ohm DB9M
DTR 4 --[####]--* DTR set to +5V by Apcupsd
|
CTS 8 ----------*--------- 5 Low Battery
GND 5 -------------------- 4 Ground
DCD 1 -------------------- 2 On Battery
RTS 7 -------------------- 1 Kill UPS Power
List of components one needs to make the Simple cable:
- One (1) male DB9 connector, use solder type connector only.
- One (1) female DB9/25F connector, use solder type connector
only.
- One (1) 4.7K ohm 1/4 watt 5% resistor.
- rosin core solder.
- three (3) to five (5) feet of 22AWG multi-stranded four or more
conductor cable.
Assembly instructions:
- Solder the resistor into pin 4 of the female DB9 connector.
- Next bend the resistor so that it connects to pin 8 of the
female DB9 connector.
- Pin 8 on the female connector is also wired to pin 5 on the male
DB9 connector. Solder both ends.
- Solder the other pins, pin 5 on the female DB9 to pin 4 on the
male connector; pin 1 on the female connector to pin 2 on the male
connector; and pin 7 on the female connector to pin 1 on the male
connector.
- Double check your work.
We use the DTR (pin 4 on the female connector) as our +5 volts
power for the circuit. It is used as the Vcc pull-up voltage for
testing the outputs on any "UPS by APC" in voltage-signalling mode.
This cable may not work on a BackUPS Pro if the default
communications are in apcsmart mode. This cable is also valid for
use on a ShareUPS BASIC Port. It is reported to work on
SmartUPSes, however the Smart Cable described above is preferred.
To have a better idea of what is going on inside apcupsd,
for the SIMPLE cable apcupsd reads three signals and sets three:
- Reads:
CD, which apcupsd uses for the On Battery signal when high.
CTS, which apcupsd uses for the Battery Low signal when high.
- RxD (SR), which apcupsd uses for the Line Down
- signal when high. This signal isn't used for much.
- Sets:
- DTR, which apcupsd sets when it detects a power failure (generally
- 5 to 10 seconds after the CD signal goes high). It
clears this signal if the CD signal subsequently goes low
-- i.e. power is restored.
- TxD (ST), which apcupsd clears when it detects that the CD signal
- has gone low after having gone high - i.e. power is restored.
- RTS, which apcupsd sets for the killpower signal -- to cause the UPS
- to shut off the power.
Please note that these actions apply only to the SIMPLE cable. The
signals used on the other cables are different.
Finally, here is another way of looking at the CUSTOM-SIMPLE
cable:
APCUPSD SIMPLE-CUSTOM CABLE
Computer Side | Description of Cable | UPS Side
DB9f | DB25f | | DB9m | DB25m
4 | 20 | DTR (5vcc) *below | n/c |
8 | 5 | CTS (low battery) *below | <- 5 | 7
2 | 3 | RxD (no line voltage) *below | <- 3 | 2
5 | 7 | Ground (Signal) | 4 | 20
1 | 8 | CD (on battery from UPS) | <- 2 | 3
7 | 4 | RTS (kill UPS power) | -> 1 | 8
n/c | 1 | Frame/Case Gnd (optional) | 9 | 22
Note: the <- and -> indicate the signal direction.
When using this cable with apcupsd specify the following in
apcupsd.conf:
UPSCABLE simple
UPSTYPE dumb
DEVICE /dev/ttyS0 (or whatever your serial port is)
If you have a BackUPS CS, you are probably either using it with the
USB cable that is supplied or with the 940-0128A supplied by APC,
which permits running the UPS in dumb mode. By building your own
cable, you can now run the BackUPS CS models (and perhaps also the
ES models) using smart signalling and have all the same information
that is available as running it in USB mode.
The jack in the UPS is actually a 10 pin RJ45. However, you can
just as easily use a 8 pin RJ45 connector, which is more standard
(ethernet TX, and ISDN connector). It is easy to construct the
cable by cutting off one end of a standard RJ45-8 ethernet cable
and wiring the other end (three wires) into a standard DB9F female
serial port connector.
Below, you will find a diagram for the CUSTOM-RJ45 cable:
CUSTOM-RJ45 CABLE
Signal Computer UPS UPS
DB9F RJ45-8 RJ45-10
RxD 2 ---------------- 1 2 TxD Send
TxD 3 ---------------- 7 8 RxD Receive
GND 5 ---------------- 6 7 Ground
FG Shield ---------------- 3 4 Frame Ground
The RJ45-8 pins are: looking at the end of the connector:
8 7 6 5 4 3 2 1
___________________
| . . . . . . . . |
| |
-------------------
|____|
The RJ45-10 pins are: looking at the end of the connector:
10 9 8 7 6 5 4 3 2 1
_______________________
| . . . . . . . . . . |
| |
-----------------------
|____|
For the serial port DB9F connector, the pin numbers are stamped in
the plastic near each pin. In addition, there is a diagram near the
end of this chapter.
Note, one user, Martin, has found that if the shield is not
connected to the Frame Ground in the above diagram (not in our
original schematic), the UPS (a BackUPS CS 500 EI) will be unstable
and likely to rapidly switch from power to batteries (i.e.
chatter).
When using this cable with apcupsd specify the following in
apcupsd.conf:
UPSCABLE smart
UPSTYPE apcsmart
DEVICE /dev/ttyS0 (or whatever your serial port is)
The information for constructing this cable was discovered and
transmitted to us by slither_man. Many thanks!
apcupsd will also support the following off the shelf cables that
are supplied by APC
- 940-0020[B/C] Simple Signal Only, all models.
- 940-0023A Simple Signal Only, all models.
- 940-0119A Simple Signal Only, Back-UPS Office, and BackUPS ES.
- 940-0024[B/C/G] Smart mode Only, SU and BKPro only.
- 940-0095[A/B/C] PnP (Plug and Play), all models.
- 940-1524C Smart mode Only
- 940-0128A Simple Signal Only, Back-UPS CS in serial mode.
- All USB cables such as 940-0127[A/B]
The following table shows the features supported by the current
version of apcupsd for various cables running the UPS in
voltage-signalling mode.
| Cable |
Power Loss |
Low Battery |
Kill Power |
Cable Disconnected |
|---|
| 940-0020B |
Yes |
No |
Yes |
No |
| 940-0020C |
Yes |
Yes |
Yes |
No |
| 940-0023A |
Yes |
No |
No |
No |
| 940-0119A |
Yes |
Yes |
Yes |
No |
| 940-0127A |
Yes |
Yes |
Yes |
No |
| 940-0128A |
Yes |
Yes |
Yes |
No |
| 940-0095A/B/C |
Yes |
Yes |
Yes |
No |
| simple |
Yes |
Yes |
Yes |
No |
Apparently, all APC voltage-signalling UPSes with DB9 serial ports
have the same signals on the output pins of the UPS. The difference
at the computer end is due to different cable configurations. Thus,
by measuring the connectivity of a cable, one can determine how to
program the UPS.
The signals presented or accepted by the UPS on its DB9 connector
using the numbering scheme listed above is:
UPS Pin Signal meaning
1 <- Shutdown when set by computer for 1-5 seconds.
2 -> On battery power (this signal is normally low but
goes high when the UPS switches to batteries).
3 -> Mains down (line fail) See Note 1 below.
5 -> Low battery. See Note 1 below.
6 -> Inverse of mains down signal. See Note 2 below.
7 <- Turn on/off power (only on advanced UPSes only)
Note 1: these two lines are normally open, but close when the
appropriate signal is triggered. In fact, they are open collector
outputs which are rated for a maximum of +40VDC and 25 mA. Thus
the 4.7K ohm resistor used in the Custom Simple cable works
quite well.
Note 2: the same as note 1 except that the line is normally closed,
and opens when the line voltage fails.
The Back-UPS Office UPS has a telephone type jack as output, which
looks like the following:
Looking at the end of the connector:
6 5 4 3 2 1
_____________
| . . . . . . |
| |
| |----------|
|__|
It appears that the signals work as follows:
UPS Signal meaning
1 (brown) <- Shutdown when set by computer for 1-5 seconds.
2 (black) -> On battery power
3 (blue) -> Low battery
4 (red) Signal ground
5 (yellow) <- Begin signalling on other pins
6 (none) none
| Supported Models: | Simple Signaling such as BackUPS |
|---|
| Contributed by: | Lazar M. Fleysher |
|---|
Although we do not know what the black box semiconductor contains,
we believe that we understand its operation (many thanks to Lazar
M. Fleysher for working this out).
This cable can only be used on voltage-signalling UPSes, and
provides the On Battery signal as well as kill UPS power. Most
recent evidence (Lazar's analysis) indicates that this cable under
the right conditions may provide the Low Battery signal. This is
yet to be confirmed.
This diagram is for informational purposes and may not be complete.
We don't recommend that use it to build you build one yourself.
APC Part# - 940-0020B
Signal Computer UPS
DB9F DB9M
CTS 8 -------------------- 2 On Battery
DTR 4 -------------------- 1 Kill power
GND 5 ---------------*---- 4 Ground
|
--- *---- 9 Common
DCD 1 ----|///|----------- 5 Low Battery
|\\\|
RTS 7 ----|///| (probably a
--- semi-conductor)
| Supported Models: | Simple Signaling such as BackUPS |
|---|
This cable can only be used on voltage-signalling UPSes, and
provides the On Battery signal, the Low Battery signal as well as
kill UPS power. You may specify UPSCABLE 940-0020C.
This diagram is for informational purposes and may not be complete.
We don't recommend that use it to build you build one yourself.
APC Part# - 940-0020C
Signal Computer UPS
DB9F DB9M
CTS 8 -------------------- 2 On Battery
DTR 4 -------------------- 1 Kill power
GND 5 ---------------*---- 4 Ground
|
*---- 9 Common
RTS 7 -----[ 93.5K ohm ]----- 5 Low Battery
or semi-conductor
| Supported Models: | Simple Signaling such as BackUPS |
|---|
This cable can only be used on voltage-signalling UPSes, and
apparently only provides the On Battery signal. As a consequence,
this cable is pretty much useless, and we recommend that you find a
better cable because all APC UPSes support more than just On
Battery. Please note that we are not sure the following diagram is
correct.
This diagram is for informational purposes and may not be complete.
We don't recommend that use it to build you build one yourself.
APC Part# - 940-0023A
Signal Computer UPS
DB9F DB9M
DCD 1 -------------------- 2 On Battery
3.3K ohm
TxD 3 --[####]-*
|
DTR 4 ---------*
GND 5 ---------------*---- 4 Ground
|
*---- 9 Common
| Supported Models: | SmartUPS (all models with DB9 serial port) |
|---|
If you wish to build the standard cable furnished by APC
(940-0024C), use the following diagram.
APC Part# - 940-0024C
Signal Computer UPS
DB9F DB9M
RxD 2 -------------------- 2 TxD Send
TxD 3 -------------------- 1 RxD Receive
DCD 1 --*
|
DTR 4 --*
GND 5 -------------------- 9 Ground
RTS 7 --*
|
CTS 8 --*
| Supported Models: | APC BackUPS Pro PNP |
|---|
| Contributed by: | Chris Hanson cph at zurich.ai.mit.edu |
|---|
This is the definitive wiring diagram for the 940-0095A cable
submitted by Chris Hanson, who disassembled the original cable,
destroying it in the process. He then built one from his diagram
and it works perfectly.
APC Part# - 940-0095A
UPS end Computer end
------- ------------
47k 47k
BATTERY-LOW (5) >----R1----*----R2----*----< DTR,DSR,CTS (4,6,8)
| |
| |
| / E
| |/
| B |
*-------| 2N3906 PNP
|
|\
\ C
|
|
*----< DCD (1) Low Batt
|
|
R 4.7k
3
|
4.7k |
SHUTDOWN (1) >----------*----R4----*----< TxD (3)
|
| 1N4148
*----K|---------< RTS (7) Shutdown
POWER-FAIL (2) >--------------------------< RxD,RI (2,9) On Batt
GROUND (4,9) >--------------------------< GND (5)
Operation:
DTR is "cable power" and must be held at SPACE. DSR or CTS may
be used as a loopback input to determine if the cable is plugged
in.
DCD is the "battery low" signal to the computer. A SPACE on this
line means the battery is low. This is signalled by BATTERY-LOW
being pulled down (it is probably open circuit normally).
Normally, the transistor is turned off, and DCD is held at the MARK
voltage by TxD. When BATTERY-LOW is pulled down, the voltage
divider R2/R1 biases the transistor so that it is turned on,
causing DCD to be pulled up to the SPACE voltage.
TxD must be held at MARK; this is the default state when no data
is being transmitted. This sets the default bias for both DCD and
SHUTDOWN. If this line is an open circuit, then when BATTERY-LOW is
signalled, SHUTDOWN will be automatically signalled; this would be
true if the cable were plugged in to the UPS and not the computer,
or if the computer were turned off.
RTS is the "shutdown" signal from the computer. A SPACE on this
line tells the UPS to shut down.
RxD and RI are both the "power-fail" signals to the computer. A
MARK on this line means the power has failed.
SPACE is a positive voltage, typically +12V. MARK is a negative
voltage, typically -12V. Linux appears to translate SPACE to a 1
and MARK to a 0.
| Supported Models: | Many simple-signaling (aka voltage signaling)
models such as BackUPS |
|---|
This diagram is for informational purposes and may not be complete.
We don't recommend that use it to build you build one yourself.
APC Part# - 940-0095B
Signal Computer UPS
DB9F DB9M
DTR 4 ----*
CTS 8 ----|
DSR 6 ----|
DCD 1 ----*
GND 5 ---------------*---- 4 Ground
|
*---- 9 Common
RI 9 ----*
|
RxD 2 ----*--------------- 2 On Battery
TxD 3 ----------[####]---- 1 Kill UPS Power
4.7K ohm
| Supported Models: | Older BackUPS Office |
|---|
This diagram is for informational purposes and may not be complete.
We don't recommend that use it to build you build one yourself.
APC Part# - 940-0119A
UPS Computer
pins pins Signal Signal meaning
1 (brown) 4,6 DSR DTR <- Shutdown when set by computer for 1-5 seconds.
2 (black) 8,9 RI CTS -> On battery power
3 (blue) 1,2 CD RxD -> Low battery
4 (red) 5 Ground
5 (yellow) 7 RTS <- Begin signalling on other pins
6 (none) none
| Supported Models: | Older Serial BackUPS ES |
|---|
| Contributed by: | William Stock |
|---|
The BackUPS ES has a straight through serial cable with no
identification on the plugs. To make it work with apcupsd, specify
the { UPSCABLE 940-0119A} and { UPSTYPE backups}. The equivalent of
cable 940-0119A is done on a PCB inside the unit.
computer ----------- BackUPS-ES -----------------
DB9-M DB-9F
pin signal pin
4 DSR -> 4 --+
| diode resistor
6 DTR -> 6 --+---->|----/\/\/\---o kill power
1 DCD <- 1 --+
|
2 RxD <- 2 --+----------------+--o low battery
|
7 RTS -> 7 --------+--/\/\/\--+
|
+--/\/\/\--+
|
8 RI <- 8 --+----------------+--o on battery
|
9 CTS <- 9 --+
5 GND --- 5 ----------------------o ground
3 TxD 3 nc
| Supported Models: | Older USB BackUPS ES and CS |
|---|
| Contributed by: | Many, thanks to all for your help! |
|---|
Though these UPSes are USB UPSes, APC supplies a serial cable
(typically with a green DB9 F connector) that has 940-0128A stamped
into one side of the plastic serial port connector. The other end
of the cable is a 10 pin RJ45 connector that plugs into the UPS
(thanks to Dean Waldow for sending a cable!). Apcupsd version 3.8.5
and later supports this cable when specified as { UPSCABLE
940-0128A} and { UPSTYPE dumb}. However, running in this mode much
of the information that would be available in USB mode is lost. In
addition, when apcupsd attempts to instruct the UPS to kill the
power, it begins cycling about 4 times a second between battery and
line. The solution to the problem (thanks to Tom Suzda) is to
unplug the UPS and while it is still chattering, press the power
button (on the front of the unit) until the unit beeps and the
chattering stops. After that the UPS should behave normally and
power down 1-2 minutes after requested to do so.
Thanks to all the people who have helped test this and have
provided information on the cable wiring, our best guess for the
cable schematic is the following:
APC Part# - 940-0128A
computer --------- Inside the Connector--------- UPS
DB9-F | | RJ45
pin - signal | | Pin - Color
| |
4 DSR ->|---+ |
| | diode resistor |
6 DTR ->|---+---->|----/\/\/\---o kill power | 8 Orange
| |
1 DCD <-|----+ |
| | |
2 RxD <-|----+----------------+--o low battery| 3 Brown
| | |
7 RTS ->|----------+--/\/\/\--+ |
| | |
| +--/\/\/\--+ |
| | |
8 RI <-|----+----------------+--o on battery | 2 Black
| | |
9 CTS <-|----+ |
| signal |
5 GND --|-----------------------o ground | 7 Red
| |
3 TxD | |
| chassis |
Chassis/GND |-----------------------o ground | 4 Black
| |
| Not connected | 1, 5, 6, 9, 10
--------------------------------------
The RJ45 pins are: looking at the end of the connector:
10 9 8 7 6 5 4 3 2 1
_______________________
| . . . . . . . . . . |
| |
-----------------------
|____|
| Supported Models: | BackUPS XS1000(BX-1000), Possibly other USB models |
|---|
| Contributed by: | Jan Babinski jbabinsk at pulsarbeacon dot com |
|---|
940-0128D is functionally similar to the 940-0128A cable except for
NC on (6) DTR and (2) RD on the computer side.
Unverified: Try setting apcupsd to UPSTYPE dumb and UPSCABLE 940-0128A.
APC Part# - 940-0128D
DB9(Computer) RJ45-10(UPS)
(5) (1) ____________
( o o o o o ) [ oooooooooo ]
\ o o o o / [____________]
(9) (6) (10) [_] (1)
RI(9)<---+
|
CTS(8)<---+--- E 2N2222(NPN)
\|___
____ /| B |
| C |
| |
+---vvvv---+--[>|------<(2)OnBatt
RTS(7)>---| 2k 1N5819
+---vvvv---+--[>|------<(3)LowBatt
| |
+--- C |
\|___|
/| B
DCD(1)<------- E 2N2222(NPN)
DTR(4)>-------------------------->(8)KillPwr
GND(5)----------------------------(7)Signal GND
(Shield)--------------------------(4)Chassis GND
| Supported Models: | BackUPS XS1000(BX-1000), Possibly other USB models |
|---|
| Contributed by: | Jan Babinski jbabinsk at pulsarbeacon dot com |
|---|
Standard USB cable for USB-capable models with 10-pin RJ45 connector.
APC Part# - 940-0127B
USB(Computer) RJ45-10(UPS)
_________ ____________
| = = = = | [ oooooooooo ]
|_________| [____________]
(1) (4) (10) [_] (1)
+5V(1)-----------(1)+5V
DATA+(2)-----------(9)DATA+
DATA-(3)-----------(10)DATA-
GND(4)-----------(7)Signal GND
(Shield)-----------(4)Chassis GRND
Due to inadequacies in the
Win32 API, it is not possible to set/clear/get all the serial port
line signals. apcupsd can detect: CTS, DSR, RNG, and CD. It can set
and clear: RTS and DTR.
This imposes a few minor restrictions on the functionality of some
of the cables. In particular, LineDown on the Custom Simple cable,
and Low Battery on the 0023A cable are not implemented.
Note: In a future release of apcupsd this procedure will be
replaced by a daemon operation that can be performed on all types
of UPS.
This section does not apply to voltage-signalling or dumb UPSes
such as the older BackUPS models.
Smart UPSes internally compute the remaining runtime, and apcupsd
uses the value supplied by the UPS. As the batteries age (after say
two or three years), the runtime computation may no longer be
accurate since the batteries no longer hold the same charge. As a
consequence, in the event of a power failure, the UPS and thus
apcupsd can report a runtime of 5 minutes remaining when in fact
only one minute remains. This can lead to a shutdown before you
might expect it, because regardless of the runtime remaining that
is reported, the UPS will always correctly detect low batteries and
report it, thus causing apcupsd to correctly shutdown your
computer.
If you wish to have the UPS recalibrate the remaining runtime
calculations, you can do so manually as the current version of
apcupsd does not support this feature. To do so,
- Shutdown apcupsd
- contact your UPS directly using some terminal program such as
minicom, tip, or cu with the settings 2400 8N1 (2400 baud, 8 bits,
no parity, 1 stop bit). Be extremely careful what you send to your
UPS as certain characters may cause it to power down or may even
cause damage to the UPS. Try sending an upper case Y to the UPS
(without a return at the end). It should respond with SM. If this
is not the case, read the chapter on testing. If you fat finger the
Y and enter y instead, no cause for alarm, you will simply get the
APC copyright notice.
- when you are sure you are properly connected send an upper case
D (no cr). This will put the UPS into calibration mode, and it will
drain the battery down to 25% capacity (35% for a Matrix) at which
point it will go back on the mains. In doing so, it will recompute
the runtime calibration.
- If you wish to abort the calibration, enter a second D command.
- When you are done, restart apcupsd.
In principle, you should be able to do this with the computer
powered by the UPS, but if you wish to be completely safe, you
should plug your computer into the wall prior to performing the
runtime calibration. In that case, you will need to artificially
load the UPS with light bulbs or other means. You should supply a
load of about 30 to 35% but not more than 50%. You can determine
the load by looking at the output of the apcaccess status
command while apcupsd is running.
You should not run the recalibration command more than once or
twice per year as discharging these kinds of batteries tends to
shorten their life span.
There is a good deal of information available about the UPS and apcupsd's
status. This document describes the format of that information.
Normally you will get at it via apcaccess, but there are other ways
as well.
STATUS output is in ASCII format with a single data value or piece
of information on each line output. Because not all UPSes supply
the same information, the output varies based on the type of UPS
that you are using. In general, if the information is not available
for your UPS, the line will be missing entirely or the data portion of
the output record will contain an N/A indicating that the information
is not available.
Status logging consists of periodically logging ALL available
information concerning the UPS. Since the volume of data is rather
large (over 1000 bytes per status), the STATUS data is not
automatically sent to the system log file. Instead, it is written
as a series of data records in a specific file (normally
/etc/apcupsd/apcupsd.status).
After each write, the file is rewound so that the size of the file
remains constant. The STATUS file is kept for backward compatibility
and will be eliminated in a future version of apcupsd. The preferred
method for obtaining this information is from apcaccess or by using
the CGI interface (see apcupsd Network Monitoring (CGI) Programs).
To make reading the status data reliable via a named pipe, the
first record written contains a version number, the number of
records that follow the first record, and the total number of bytes
in those subsequent records. An actual example of such a status
file (/etc/apcupsd/apcupsd.status) is shown below.
Consequently, the first record always consists of 24 bytes (23
characters followed by a newline). This record starts with APC and
as indicated in the example is followed by 37 records
consisting of 906 bytes. The last record begins with END APC and
contains the date and time matching the DATE record.
When this data is written to a file, it is written as two records,
the first record, and all the other records together. In reading
the file, it can be either be read a record at a time, or in one
big read.
When this data is written to syslog(), it is written a record at a
time. The first record is the first 24 bytes. By having the number
of records and the size in the first record, the complete status
can be reliably reassembled.
An example of output from a BackUPS RS 1500 follows:
APC : 001,037,0906
DATE : Sun Apr 26 17:22:22 EDT 2009
HOSTNAME : mail.kroptech.com
VERSION : 3.14.2 (10 September 2007) redhat
UPSNAME : ups0
CABLE : USB Cable
MODEL : Back-UPS RS 1500
UPSMODE : Stand Alone
STARTTIME: Sun Apr 26 10:22:46 EDT 2009
STATUS : ONLINE
LINEV : 123.0 Volts
LOADPCT : 24.0 Percent Load Capacity
BCHARGE : 100.0 Percent
TIMELEFT : 144.5 Minutes
MBATTCHG : 5 Percent
MINTIMEL : 3 Minutes
MAXTIME : 0 Seconds
SENSE : Medium
LOTRANS : 097.0 Volts
HITRANS : 138.0 Volts
ALARMDEL : Always
BATTV : 26.8 Volts
LASTXFER : Low line voltage
NUMXFERS : 0
TONBATT : 0 seconds
CUMONBATT: 0 seconds
XOFFBATT : N/A
SELFTEST : NO
STATFLAG : 0x07000008 Status Flag
MANDATE : 2003-05-08
SERIALNO : JB0319033692
BATTDATE : 2001-09-25
NOMINV : 120
NOMBATTV : 24.0
FIRMWARE : 8.g6 .D USB FW:g6
APCMODEL : Back-UPS RS 1500
END APC : Sun Apr 26 17:22:32 EDT 2009
The meaning of the above variables are:
- APC
- Header record indicating the STATUS format
revision level, the number of records that follow the APC
statement, and the number of bytes that follow the record.
- DATE
- The date and time that the information was last obtained from the UPS.
- HOSTNAME
- The name of the machine that collected the UPS data.
- UPSNAME
- The name of the UPS as stored in the EEPROM or in the UPSNAME
directive in the configuration file.
- VERSION
- The apcupsd release number, build date, and platform.
- CABLE
- The cable as specified in the configuration file (UPSCABLE).
- MODEL
- The UPS model as derived from information from the UPS.
- UPSMODE
- The mode in which apcupsd is operating as specified in the configuration
file (UPSMODE)
- STARTTIME
- The time/date that apcupsd was started.
- STATUS
- The current status of the UPS (ONLINE, ONBATT, etc.)
- LINEV
- The current line voltage as returned by the UPS.
- LOADPCT
- The percentage of load capacity as estimated by the UPS.
- BCHARGE
- The percentage charge on the batteries.
- TIMELEFT
- The remaining runtime left on batteries as estimated by the UPS.
- MBATTCHG
- If the battery charge percentage (BCHARGE)
drops below this value, apcupsd will shutdown your system.
Value is set in the configuration file (BATTERYLEVEL)
- MINTIMEL
- apcupsd will shutdown your system if the
remaining runtime equals or is below this point.
Value is set in the configuration file (MINUTES)
- MAXTIME
- apcupsd will shutdown your system if the time
on batteries exceeds this value. A value of zero disables the
feature. Value is set in the configuration file (TIMEOUT)
- MAXLINEV
- The maximum line voltage since the UPS was started, as reported by the UPS
- MINLINEV
- The minimum line voltage since the UPS was started, as returned by the UPS
- OUTPUTV
- The voltage the UPS is supplying to your equipment
- SENSE
- The sensitivity level of the UPS to line voltage fluctuations.
- DWAKE
- The amount of time the UPS will wait before restoring power to your
equipment after a power off condition when the power is restored.
- DSHUTD
- The grace delay that the UPS gives after
receiving a power down command from apcupsd before it powers off
your equipment.
- DLOWBATT
- The remaining runtime below which the UPS
sends the low battery signal. At this point apcupsd will force an
immediate emergency shutdown.
- LOTRANS
- The line voltage below which the UPS will switch to batteries.
- HITRANS
- The line voltage above which the UPS will switch to batteries.
- RETPCT
- The percentage charge that the batteries must
have after a power off condition before the UPS will restore power
to your equipment.
- ITEMP
- Internal UPS temperature as supplied by the UPS.
- ALARMDEL
- The delay period for the UPS alarm.
- BATTV
- Battery voltage as supplied by the UPS.
- LINEFREQ
- Line frequency in hertz as given by the UPS.
- LASTXFER
- The reason for the last transfer to batteries.
- NUMXFERS
- The number of transfers to batteries since apcupsd startup.
- XONBATT
- Time and date of last transfer to batteries, or N/A.
- TONBATT
- Time in seconds currently on batteries, or 0.
- CUMONBATT
- Total (cumulative) time on batteries in seconds since apcupsd startup.
- XOFFBATT
- Time and date of last transfer from batteries, or N/A.
- SELFTEST
The results of the last self test, and may have the following values:
- OK: self test indicates good battery
- BT: self test failed due to insufficient battery capacity
- NG: self test failed due to overload
- NO: No results (i.e. no self test performed in the last 5 minutes)
- STESTI
- The interval in hours between automatic self tests.
- STATFLAG
- Status flag. English version is given by STATUS.
- DIPSW
- The current dip switch settings on UPSes that have them.
- REG1
- The value from the UPS fault register 1.
- REG2
- The value from the UPS fault register 2.
- REG3
- The value from the UPS fault register 3.
- MANDATE
- The date the UPS was manufactured.
- SERIALNO
- The UPS serial number.
- BATTDATE
- The date that batteries were last replaced.
- NOMOUTV
- The output voltage that the UPS will attempt to supply when on battery
power.
- NOMINV
- The input voltage that the UPS is configured to expect.
- NOMBATTV
- The nominal battery voltage.
- NOMPOWER
- The maximum power in Watts that the UPS is designed to supply.
- HUMIDITY
- The humidity as measured by the UPS.
- AMBTEMP
- The ambient temperature as measured by the UPS.
- EXTBATTS
- The number of external batteries as
defined by the user. A correct number here helps the UPS compute
the remaining runtime more accurately.
- BADBATTS
- The number of bad battery packs.
- FIRMWARE
- The firmware revision number as reported by the UPS.
- APCMODEL
- The old APC model identification code.
- END APC
- The time and date that the STATUS record was written.
If you experienced so problems with the testing procedures, or if
you are porting apcupsd to another system, or you are simply
curious, you may want to know exactly what is going on during the
shutdown process.
The shutdown sequence is as follows:
apcupsd detects that there is a power problem and it calls
/etc/apcupsd/apccontrol powerout. By default this event
does nothing, but it can be overridden to notify users, etc.
After the configured ONBATTERYDELAY, apcupsd
calls /etc/apcupsd/apccontrol onbattery, which normally sends a
message to all users informing them that the UPS is on batteries.
When one of the conditions listed below occurs, apcupsd issues a
shutdown command by calling /etc/apcupsd/apccontrol doshutdown,
which should perform a shutdown of your system using the system
shutdown(8) command. You can modify the behavior as described in
Customizing Event Handling.
The conditions that trigger the shutdown can be any of the following:
- Running time on batteries have expired (TIMEOUT)
- The battery runtime remaining is below the configured value (BATTERYLEVEL)
- The estimated remaining runtime is below the configured value (MINUTES)
- The UPS signals that the batteries are exhausted.
A shutdown could also be initiated if apcupsd detects that the
batteries are no longer functioning correctly. This case, though
very unusual, can happen at any time even if there is proper mains
voltage, and /etc/apcupsd/apccontrol emergency is called.
Just before initiating any shutdown through the apccontrol script,
apcupsd will create the file /etc/apcupsd/powerfail. This file will
be used later in the shutdown sequence to recall apcupsd after
syncing of the disks to initiate a power off of the UPS.
If the /etc/nologin file has not already been created, it will
normally be created during the shutdown sequence to prevent
additional users from logging in (see the NOLOGIN configuration
directive).
Even though apcupsd has requested the system to perform a shutdown,
it continues running.
When the system signals apcupsd to do exit, it does so. This is
part of the normal system shutdown (at least on Unix and Linux
systems) and the exact time that apcupsd receives the termination
signal depends on how the shutdown links (usually in /etc/rc.d) are
set.
Note that on Windows NT systems, apcupsd apparently continues to
run as a Service even though the machine is "shutdown".
During the shutdown of the system after apcupsd has been forced
to exit, one of the last things done by the system shutdown is to
call the halt script, which is usually in /etc/rc.d/halt or
/etc/rc.d/init.d/halt, or possibly in /sbin/init.d/rc.0 depending
on your system. If apcupsd was properly installed, this standard
halt script was modified to include a bit of new logic just before
the final halt of the system. It first tests if the file
/etc/apcupsd/powerfail exists, and if it does, it executes
/etc/apcupsd/apccontrol killpower. It is this last step that will
cause apcupsd to be re-executed with the --killpower option
on the command line. This option tells apcupsd to inform the UPS to
kill the power.
This final step is important if you want to ensure that your system
will automatically reboot when the power comes back on. The actual
code used on the Red Hat version is:
# See if this is a powerfail situation. # ***apcupsd***
if [ -f /etc/apcupsd/powerfail ]; then # ***apcupsd***
echo # ***apcupsd***
echo "APCUPSD will now power off the UPS" # ***apcupsd***
echo # ***apcupsd***
/etc/apcupsd/apccontrol killpower # ***apcupsd***
echo # ***apcupsd***
echo "Please ensure that the UPS has powered off before rebooting" # ***apcupsd***
echo "Otherwise, the UPS may cut the power during the reboot!!!" # ***apcupsd***
echo # ***apcupsd***
fi # ***apcupsd***
The above code must be inserted as late as possible in the halt
script. On many systems, such as Red Hat, all the disk drives were
unmounted, then remounted read-only, thus permitting access to the
/etc files and the apcupsd executable. If your system does not
explicitly remount the disks, you must remount them in read-only
mode in the code that you add. Examples of code fragments that do
this can be found in the distributions/suse subdirectory of the
source.
If you are not able to insert the above code in your halt script
because there is no halt script, or because your halt script calls
the init program as some Unix systems do, you can either just
forget about powering off the UPS, which means that your machine
will not automatically reboot after a power failure, or there is
yet another alternative, though not at all as satisfying as
inserting code in the halt script.
Only if you cannot insert the appropriate code in the halt script,
when you start apcupsd, normally from the /etc/rc.d/init.d/apcupsd
script, use the --kill-on-powerfail option. This will cause
apcupsd to program the UPS to shutoff the power just before it
(apcupsd) does the system shutdown. Please note that this is not
the most ideal solution. Read on to understand why.
A very important consideration is that you must set the EEPROM in
your UPS so that it waits a sufficient time for the system to halt
before it shuts off the UPS power.
When using a USB connection, apcupsd automatically sets this value
to 60 seconds. When using a serial connection to a SmartUPS, you
must configure the value in the UPS EEPROM by hand using apctest.
Obviously if your halt script is not properly modified, apcupsd
will not be able to shut off the power to the UPS, and if the power
returns before the batteries are exhausted your system will not
automatically reboot. In any case, your machine should have been
cleanly shut down.
In master/slave configurations, however, the master cannot be 100
percent sure that the slaves have all shutdown before it performs
the power off. To avoid this situation, be sure to configure any
slaves (clients) to shut down before the master by setting different
TIMEOUT, BATTERYLEVEL, or MINUTES parameters in the
config file.
Also, on a slave machine, you do not want to use the modified halt
script since it will recall apcupsd, which will detect that it is a
slave (i.e. no connection to the UPS) and will complain that it
cannot do the killpower. This situation is not harmful just
annoying and possibly confusing.
One possible problem during shutdown can be caused by remnants of
old versions. Please be sure to delete or rename all prior versions
(/usr/local/sbin/apcupsd or /sbin/powersc).
Normally, apcupsd is automatically started when
your system is rebooted. This normally occurs because the startup
script apcupsd is linked into the appropriate places in /etc/rc.d.
On most Linux systems, there is a program called chkconfig(8) that
will automatically link the startup script. This program is invoked
by the make install scripts, or it is explicitly done for those
systems that do not have chkconfig(8). If this is not the case, you
can either link it in appropriately yourself or explicitly call it
from your rc.local file. The appropriate manual way to startup
apcupsd is by executing:
<path>/apcupsd start
where path is normally /etc/rc.d or /etc/rc.d/init.d depending on
your system. Using this script is
important so that any files remaining around after a power failure
are removed. Likewise, shutting down apcupsd should be done with
the same script:
<path>/apcupsd stop
Please see the Killpower under Windows chapter of this manual for
considerations pertaining to shutdown and killpower on Windows.
The APC UPS
protocol was originally analyzed by Pavel Korensky with additions
from Andre H. Hendrick beginning in 1995, and we want to give
credit for good, hard work, where credit is due. After having said
that, you will see that Steven Freed built much of the original
apcupsd information file.
The start of this chapter of the apcupsd manual in HTML format was
pulled from the Network UPS Tools (NUT) site
(http://www.networkupstools.org/ups-protocols/apcsmart.html). It
has been an invaluable tool in improving apcupsd, and I consider it
the Bible of APC UPS programming. In the course of using it, I
have added information gleaned from apcupsd and information
graciously supplied by APC.
Here's the information on the elusive APC smart signaling protocol
used by their higher end units (Back-UPS Pro, Smart-UPS,
Matrix-UPS, etc). What you see here has been collected from a
variety of sources. Some people analyzed the chatter between
PowerChute and their hardware. Others sent various characters to
the UPS and figured out what the results meant.
Normal 9 pin serial connections have TxD on 3 and RxD on 2. APC's
smart serial ports put TxD on pin 1 and RxD on pin 2. This means
you go nowhere if you use a normal straight through serial cable.
In fact, you might even power down the load if you plug one of
those cables in. This is due to the odd routing of pins - DTR and
RTS from the PC usually wind up driving the on/off line. So, when
you open the port, they go high and *poof* your computer dies.
Despite the lack of official information from APC, this table has
been constructed. It's standard RS-232 serial communications at
2400 bps/8N1. Don't rush the UPS while transmitting or it may stop
talking to you. This isn't a problem with the normal single
character queries, but it really does matter for multi-char things
like "@000". Sprinkle a few calls to usleep() in your code and
everything will work a lot better.
The following table describes the single character "Code" or
command that you can send to the UPS, its meaning, and what sort of
response the UPS will provide. Typically, the response shown below
is followed by a newline (\n in C) and a carriage return (\r in
C). If you send the UPS a command that it does not recognize or
that is not available on your UPS, it will normally respond with "NA"
for "not available", otherwise the response is given in the
"Typical results" column.
| Character |
Meaning |
Typical results |
Other info |
|---|
| ^A |
Model string |
SMART-UPS 700 |
Spotty support for this query on older
models |
| ^N |
Turn on UPS |
n/a |
Send twice, with 1.5s delay between
chars. Only on 3rd gen SmartUPS and
Black Back-UPS Pros |
| ^Z |
Permitted
EEPROM
Values |
long string |
Gives the EEPROM permitted values for
your model. See EEPROM Values for
details. |
| A |
Front panel
test |
Light show +
"OK" |
Also sounds the beeper for 2 seconds |
| B |
Battery
voltage |
27.87 |
Varies based on current level of
charge. See also Nominal Battery
Voltage. |
| C |
Internal
Temperature |
036.0 |
Units are degrees C |
| D |
Runtime
calibration |
!, then $ |
Runs until battery is below 25% (35%
for Matrix) Updates the 'j' values.
Only works at 100% battery charge. Can
be aborted with a second "D" |
| E |
Automatic
self test
interval |
336 |
Writable variable. Possible values:
- "336" (14 days)
- "168" (7 days)
- "ON " (at power on) note extra space
- "OFF" (never)
|
| F |
Line
frequency |
60.00 |
Units are Hz. Value varies based on
locality, usually 50/60. |
| G |
Cause of
last
transfer
to battery |
O |
Possible values:
- R (unacceptable utility voltage rate
of change)
- H (high utility voltage)
- L (low utility voltage)
- T (line voltage notch or spike)
- O (no transfers since turnon)
- S (transfer due to U command or
activation of UPS test from front
panel)
- NA (transfer reason still not
available; read again)
|
| I |
Measure-UPS
Alarm enable |
FF |
not decoded yet |
| J |
Measure-UPS
Alarm status |
0F,00 |
not decoded yet |
| K |
Shutdown
with grace
period (no
return) |
OK or * |
Send twice with > 1.5s delay between
chars. Older units send "*" instead of
"OK". Length of grace period is set
with Grace Period command. UPS will
remain off and NOT power on if utility
power is restored. |
| L |
Input line
voltage |
118.3 |
Value varies based on locality. Does
not always read 000.0 on line failure. |
| M |
Maximum line
voltage |
118.9 |
This is the max voltage since the last
time this query was run. |
| N |
Minimum line
voltage |
118.1 |
This is the min voltage since the last
time this query was run. |
| O |
Output
voltage |
118.3 |
Also see on battery output voltage. |
| P |
Power load
% |
023.5 |
Relative to capacity of the UPS. |
| Q |
Status flags |
08 |
Bitmapped, see status bits below |
| R |
Turn dumb |
BYE |
Only on 3rd gen SmartUPS, SmartUPS
v/s, BackUPS Pro. Must send enter
smart mode command to resume comms. |
| S |
Soft
shutdown |
OK |
Command executes after grace period.
UPS goes online when power returns.
Only works when on battery. |
| U |
Simulate
power
failure |
!, then $ |
See Alert messages section for info
on ! and $. |
| V |
Old firmware
revision |
"GWD" or "IWI" |
See Interpretation of the Old
Firmware Revision |
| W |
Self test |
OK |
Tests battery, like pushing button on
the front panel. Results stored in "X" |
| X |
Self test
results |
OK |
Possible values:
- OK = good battery
- BT = failed due to insufficient
capacity
- NG = failed due to overload
- NO = no results available (no test
performed in last 5 minutes)
|
| Y |
Enter smart
mode |
SM |
This must be sent before any other
commands will work. See also turn dumb
command to exit smart mode. |
| Z |
Shutdown
immediately |
n/a |
Send twice with > 1.5s delay between
chars. UPS switches load off
immediately (no grace period) |
| a |
Protocol
info |
long string |
Returns three main sections delimited
by periods:
- Protocol version
- Alert messages (aka async notifiers)
- Valid commands
|
| b |
Firmware
revision |
50.9.D |
See Interpretation of the New
Firmware Revision.
Decoding the example:
- 50 = SKU (variable length)
- 9 = firmware revision
- D = country code (D=USA,
I=International, A=Asia, J=Japan,
M=Canada)
|
| c |
UPS local
id |
UPS_IDEN |
Writable variable. Up to 8 letter
identifier for keeping track of your
hardware. |
| e |
Return
threshold |
00 |
Writable variable. Minimum battery
charge % before UPS will return online
after a soft shutdown. Possible
values:
- 00 = 00% (UPS turns on immediately)
- 01 = 15%
- 02 = 25%
- 03 = 90%
|
| f |
Battery
level % |
099.0 |
Percentage of battery charge remaining |
| g |
Nominal
battery
voltage |
024 |
The battery voltage that's expected to
be present in the UPS normally. This
is a constant based on the type,
number, and wiring of batteries in the
UPS. Typically "012", "024" or "048". |
| h |
Measure-UPS
ambient
humidity (%) |
042.4 |
Percentage. Only works on models with
Measure-UPS SmartSlot card. |
| i |
Measure-UPS
dry contacts |
00 |
Bitmapped hex variable. Mapping:
- 10 = contact 1
- 20 = contact 2
- 40 = contact 3
- 80 = contact 4
|
| j |
Estimated
runtime |
0327: |
Value is in minutes. Terminated with
a colon. |
| k |
Alarm delay |
0 |
Writable variable. Controls behavior
of UPS beeper. Possible values:
- 0 = 5 second delay after power fail
- T = 30 second delay
- L = alarm at low battery only
- N = no alarm
|
| l |
Low transfer
voltage |
103 |
Writable variable. UPS goes on battery
when voltage drops below this point. |
| m |
Manufacture
date |
11/29/96 |
Format may vary by country (MM/DD/YY
vs DD/MM/YY). Unique within groups of
UPSes (production runs) |
| n |
Serial
number |
WS9643050926 |
Unique for each UPS |
| o |
Nominal
Output
Voltage |
115 |
Expected output voltage when running
on batteries. May be a writable
variable on 220/230/240 VAC units. |
| p |
Shutdown
grace delay |
020 |
Seconds. Writable variable. Sets the
delay before soft shutdown completes.
(020/180/300/600) |
| q |
Low battery
warning |
02 |
Minutes. Writable variable. The UPS
will report a low battery condition
this many minutes before it runs out
of power |
| r |
Wakeup delay |
000 |
Seconds. Writable variable. The UPS
will wait this many seconds after
reaching the minimum charge before
returning online. (000/060/180/300) |
| s |
Sensitivity |
H |
Writable variable. Possible values:
- H = highest
- M = medium
- L = lowest
- A = autoadjust (Matrix only)
|
| t |
Measure-UPS
ambient
temperature |
80.5 |
Degrees C. Only works on models with
the Measure-UPS SmartSlot card. |
| u |
Upper
transfer
voltage |
132 |
Writable variable. UPS goes on battery
when voltage rises above this point. |
| v |
Measure-UPS
firmware |
4Kx |
Firmware information for Measure-UPS
board |
| x |
Last battery
change date |
11/29/96 |
Writable variable. Holds whatever the
user set in it. Eight characters. |
| y |
Copyright
notice |
(C) APCC |
Only works if firmware letter is
later than O |
| z |
Reset to
factory
settings |
CLEAR |
Resets most variables to initial
factory values except identity or
battery change date. Not available on
SmartUPS v/s or BackUPS Pro. |
| + |
Capability
cycle
(forward) |
various |
Cycle forward through possible
capability values. UPS sends
afterward to confirm change to EEPROM. |
| - |
Capability
cycle
(backward) |
various |
Cycle backward through possible
capability values. UPS sends
afterward to confirm change to EEPROM. |
| @nnn |
Shutdown and
return |
OK or * |
UPS shuts down after grace period with
delayed wakeup after nnn tenths of an
hour plus any wakeup delay time. Older
models send "*" instead of "OK". |
| 0x7f |
Abort
shutdown |
OK |
Use to abort @, S, K |
| ~ |
Register #1 |
see below |
See Register 1 table |
| ' |
Register #2 |
see below |
See Register 2 table |
| 0 |
Battery
constant |
|
See Resetting the UPS Battery
Constant |
| 4 |
??? |
|
Prints 35 on SmartUPS 1000 |
| 5 |
??? |
|
Prints EF on SmartUPS 1000 |
| 6 |
??? |
|
Prints F9 on SmartUPS 1000 |
| 7 |
DIP switch
positions |
|
See Dip switch info |
| 8 |
Register #3 |
see below |
See Register 3 table |
| 9 |
Line quality |
FF |
Possible values:
- 00 = unacceptable
- FF = acceptable
|
| > |
Number of
external
battery
packs |
|
SmartCell models return number of
connected packs. Other models return
value set by the user (use +/-). |
| [ |
Measure-UPS
Upper temp
limit |
NO,NO |
Degrees C. Writable Variable. Possible
values: 55, 50, 45, ..., 05.
Use +/- to change values. |
| ] |
Measure-UPS
lower temp
limit |
NO,NO |
Degrees C. Writable Variable. Possible
values: 55, 50, 45, ..., 05.
Use +/- to change values. |
| { |
Measure-UPS
Upper
humidity
limit |
NO,NO |
Percentage. Writable Variable.
Possible values: 90, 80, 70, ..., 10.
Use +/- to change values. |
| } |
Measure-UPS
lower
humidity
limit |
NO,NO |
Percentage. Writable Variable.
Possible values: 90, 80, 70, ..., 10.
Use +/- to change values. |
| Matrix-UPS and Symmetra Commands |
| ^ |
Run in
bypass mode |
BYP, INV, ERR |
If online, "BYP" response is received
as bypass mode starts. If already in
bypass, "INV" is received and UPS goes
online. If UPS can't transfer, "ERR"
received |
| < |
Number of
bad battery
packs |
000 |
Count of bad packs connected to the
UPS |
| / |
Load current |
nn.nn |
True RMS load current drawn by UPS |
| \ |
Apparent
load power |
nnn.nn |
Output load as percentage of full
rated load in VA. |
| ^V |
Output
voltage
selection |
|
Writable variable. Possible values:
- A = automatic (based on input tap)
- M = 208 VAC
- I = 240 VAC
|
| ^L |
Front panel
language |
|
Writable variable. Possible values:
- E = English
- F = French
- G = German
- S = Spanish
- 1 = unknown
- 2 = unknown
- 3 = unknown
- 4 = unknown
|
| w |
Run time
conservation |
|
Writable variable. Minutes of runtime
to leave in battery (UPS shuts down
"early"). Possible values:
- NO = disabled
- 02 = leave 2 minutes of runtime
- 05 = leave 5 minutes
- 08 = leave 8 minutes
|
| Bit |
Switch |
Option when bit=1 |
|---|
| 0 |
4 |
Low battery alarm changed from 2 to 5 mins. Autostartup disabled on
SU370ci and 400 |
| 1 |
3 |
Audible alarm delayed 30 seconds |
| 2 |
2 |
Output transfer set to 115 VAC (from 120 VAC) or to 240 VAC (from
230 VAC) |
| 3 |
1 |
UPS desensitized - input voltage range expanded |
| 4-7 |
|
Unused at this time |
This is probably the most important register of the UPS, which
indicates the overall UPS status. Some common things you'll see:
- 08 = On line, battery OK
- 10 = On battery, battery OK
- 50 = On battery, battery low
- SM = Status bit is still not available (retry reading)
| Bit |
Meaning when bit=1 |
|---|
| 0 |
Runtime calibration occurring
(Not reported by Smart UPS v/s and BackUPS Pro) |
| 1 |
SmartTrim (Not reported by 1st and 2nd generation SmartUPS models) |
| 2 |
SmartBoost |
| 3 |
On line (this is the normal condition) |
| 4 |
On battery |
| 5 |
Overloaded output |
| 6 |
Battery low |
| 7 |
Replace battery |
These single character messages are sent by the UPS any time there
is an Alert condition. All other responses indicated above are sent
by the UPS only in response to a query or action command.
| Character |
Meaning |
Description |
|---|
| ! |
Line Fail |
Sent when the UPS goes on-battery, repeated every 30
seconds until low battery condition reached. Sometimes
occurs more than once in the first 30 seconds. |
| $ |
Return from
line fail |
UPS back on line power. Only sent if a ! has been sent
previously. |
| % |
Low battery |
Sent to indicate low battery. Not implemented on
SmartUPS v/s or BackUPS Pro models |
| + |
Return from
low batt |
Sent when the battery has been recharged to some level
Only sent if a % has been sent previously. |
| ? |
Abnormal
condition |
Sent for conditions such as "shutdown due to overload"
or "shutdown due to low battery capacity". Also occurs
within 10 minutes of turnon. |
| = |
Return from
abnormal
condition |
Sent when the UPS returns from an abnormal condition
where ? was sent, but not a turn-on. Not implemented on
SmartUPS v/s or BackUPS Pro models. |
| * |
About to
turn off |
Sent when the UPS is about to switch off the load. No
commands are processed after this character is sent. Not
implemented on SmartUPS v/s, BackUPS Pro, or 3rd
generation SmartUPS models. |
| # |
Replace
battery |
Sent when the UPS detects that the battery needs to be
replaced. Sent every 5 hours until a new battery test is
run or the UPS is shut off. Not implemented on SmartUPS
v/s or BackUPS Pro models. |
| & |
Check alarm
register
for fault
(Measure-UPS) |
Sent to signal that temp or humidity out of set limits.
Also sent when one of the contact closures changes
state. Sent every 2 minutes until the alarm conditions
are reset. Only sent for alarms enabled with I. Cause of
alarm may be determined with J. Not implemented on
SmartUPS v/s or BackUPS Pro. |
| | |
Variable
change in
EEPROM |
Sent whenever any EEPROM variable is changed. Only
supported on Matrix UPS and 3rd generation SmartUPS
models. |
All bits are valid on the Matrix UPS. SmartUPS models only support
bits 6 and 7. Other models do not respond.
| Bit |
Meaning when bit=1 |
|---|
| 0 |
In wakeup mode (typically lasts < 2s) |
| 1 |
In bypass mode due to internal fault (see Register 2 or Register 3) |
| 2 |
Going to bypass mode due to command |
| 3 |
In bypass mode due to command |
| 4 |
Returning from bypass mode |
| 5 |
In bypass mode due to manual bypass control |
| 6 |
Ready to power load on user command |
| 7 |
Ready to power load on user command or return of line power |
Matrix UPS models report bits 0-5. SmartUPS models only support
bits 4-6. SmartUPS v/s and BackUPS Pro report bits 4, 6, 7.
Unused bits are set to 0. Other models do not respond.
| Bit |
Meaning when bit=1 |
|---|
| 0 |
Fan failure in electronics, UPS in bypass |
| 1 |
Fan failure in isolation unit |
| 2 |
Bypass supply failure |
| 3 |
Output voltage select failure, UPS in bypass |
| 4 |
DC imbalance, UPS in bypass |
| 5 |
Battery is disconnected |
| 6 |
Relay fault in SmartTrim or SmartBoost |
| 7 |
Bad output voltage |
All bits are valid on the Matrix UPS and 3rd generation SmartUPS
models. SmartUPS v/s and BackUPS Pro models report bits 0-5. All
others report 0-4. State change of bits 1,2,5,6,7 are reported
asynchronously with ? and = messages.
| Bit |
Meaning when bit=1 |
|---|
| 0 |
Output unpowered due to shutdown by low battery |
| 1 |
Unable to transfer to battery due to overload |
| 2 |
Main relay malfunction - UPS turned off |
| 3 |
In sleep mode from @ command (maybe others) |
| 4 |
In shutdown mode from S command |
| 5 |
Battery charger failure |
| 6 |
Bypass relay malfunction |
| 7 |
Normal operating temperature exceeded |
The Old Firmware Revision is obtained with the "V" command, which
gives a typical response such as "GWD" or "IWI", and can be
interpreted as follows:
Old Firmware revision and model ID String for SmartUPS & MatrixUPS
This is a three character string XYZ
where X == Smart-UPS or Matrix-UPS ID Code.
range 0-9 and A-P
1 == unknown
0 == Matrix 3000
5 == Matrix 5000
the rest are Smart-UPS and Smart-UPS-XL
2 == 250 3 == 400 4 == 400
6 == 600 7 == 900 8 == 1250
9 == 2000 A == 1400 B == 1000
C == 650 D == 420 E == 280
F == 450 G == 700 H == 700XL
I == 1000 J == 1000XL K == 1400
L == 1400XL M == 2200 N == 2200XL
O == 3000 P == 5000
where Y == Possible Level of Smart Features, unknown???
G == Stand Alone
T == Stand Alone
V == ???
W == Rack Mount
where Z == National Model Use Only Codes
D == Domestic 115 Volts
I == International 230 Volts
A == Asia ?? 100 Volts
J == Japan ?? 100 Volts
New Firmware revision and model ID String in NN.M.L is the format
where NN == UPS ID Code.
12 == Back-UPS Pro 650
13 == Back-UPS Pro 1000
52 == Smart-UPS 700
60 == SmartUPS 1000
72 == Smart-UPS 1400
where NN now Nn has possible meanings.
N == Class of UPS
1n == Back-UPS Pro
5n == Smart-UPS
7n == Smart-UPS NET
n == Level of intelligence
N1 == Simple Signal, if detectable WAG(*)
N2 == Full Set of Smart Signals
N3 == Micro Subset of Smart Signals
where M == Possible Level of Smart Features, unknown???
1 == Stand Alone
8 == Rack Mount
9 == Rack Mount
where L == National Model Use Only Codes
D == Domestic 115 Volts
I == International 230 Volts
A == Asia ?? 100 Volts
J == Japan ?? 100 Volts
M == North America 208 Volts (Servers)
Upon sending a ^Z, your UPS will probably spit back approximately
254 characters something like the following (truncated here for the
example):
#uD43132135138129uM43229234239224uA43110112114108 ....
It looks bizarre and ugly, but is easily parsed. The # is some kind
of marker/ident character. Skip it. The rest fits this form:
- Command character - use this to select the value
- Locale - use 'b' to find out what yours is (the last character),
'4' applies to all
- Number of choices - '4' means there are 4 possibilities coming
up
- Choice length - '3' means they are all 3 chars long
Then it's followed by the choices, and it starts over.
Matrix-UPS models have ## between each grouping for some reason.
Here is an example broken out to be more readable:
CMD DFO RSP FSZ FVL
u D 4 3 127 130 133 136
u M 4 3 229 234 239 224
u A 4 3 108 110 112 114
u I 4 3 253 257 261 265
l D 4 3 106 103 100 097
l M 4 3 177 172 168 182
l A 4 3 092 090 088 086
l I 4 3 208 204 200 196
e 4 4 2 00 15 50 90
o D 1 3 115
o J 1 3 100
o I 1 3 230 240 220 225
o M 1 3 208
s 4 4 1 H M L L
q 4 4 2 02 05 07 10
p 4 4 3 020 180 300 600
k 4 4 1 0 T L N
r 4 4 3 000 060 180 300
E 4 4 3 336 168 ON OFF
CMD == UPSlink Command.
u = upper transfer voltage
l = lower transfer voltage
e = return threshold
o = output voltage
s = sensitivity
p = shutdown grace delay
q = low battery warning
k = alarm delay
r = wakeup delay
E = self test interval
DFO == (4)-all-countries (D)omestic (I)nternational (A)sia (J)apan
(M) North America - servers.
RSP == Total number possible answers returned by a given CMD.
FSZ == Max. number of field positions to be filled.
FVL == Values that are returned and legal.
There are at this time a maximum of 12 different values that can be
programmed into the UPS EEPROM. They are:
| Command |
Meaning |
|---|
| c |
The UPS Id or name |
| x |
The last date the batteries were replaced |
| u |
The Upper Transfer Voltage |
| l |
The Lower Transfer Voltage |
| e |
The Return Battery Charge Percentage |
| o |
The Output Voltage when on Batteries |
| s |
The Sensitivity to Line Quality |
| p |
The Shutdown Grace Delay |
| q |
The Low Battery Warning Delay |
| k |
The Alarm Delay |
| r |
The Wakeup Delay |
| E |
The Automatic Self Test Interval |
The first two cases (Ident and Batt date) are somewhat special in
that you tell the UPS you want to change the value, then you supply
8 characters that are saved in the EEPROM. The last ten item are
programmed by telling the UPS that you want it to cycle to the next
permitted value.
In each case, you indicate to the UPS that you want to change the
EEPROM by first sending the appropriate query command (e.g. "c" for
the UPS ID or "u" for the Upper Transfer voltage. This command is
then immediately followed by the cycle EEPROM command or "-". In
the case of the UPS Id or the battery date, you follow the cycle
command by the eight characters that you want to put in the EEPROM.
In the case of the other ten items, there is nothing more to
enter.
The UPS will respond by "OK" and approximately 5 seconds later by a
vertical bar (|) to indicate that the EEPROM was changed.